Download as PDF, PPTX
![Program to Solve Back-Projection Problem
22
(1) Initialization
𝒓L = 𝒙 − 𝑰 ⊗ 𝑺𝑹 𝝁 − 𝑻 ⊗ 𝟏
(2) If 𝒓 < (tol), proceed to (8)
(3) 𝑖¢£¤ = argmax
p
𝒓 , 𝑰 ⊗ 𝑺𝑹 𝑩p
(4) 𝑩∗ ← [𝑩∗ 𝑩p§¨©
]
(5) Solve:
argmin
𝛀, ∁
˜𝒙 − 𝑰 ⊗ 𝑺𝑹 𝑩∗ 𝛀 7
(under the mark-to-mark length conditions)
(6) Recompute:
𝒓 «9 = 𝒙 − 𝑰 ⊗ 𝒔𝑹 (𝝁 + 𝑩∗ 𝛀∗) − 𝑻 ⊗ 𝟏
(7) Set:
𝛀 «9 ← 𝛀∗
(8) Return:
{𝑩∗, 𝛀∗, ∁}](https://image.slidesharecdn.com/20200327back-projectionproblem-200329090935/75/Theories-and-Engineering-Technics-of-2D-to-3D-Back-Projection-Problem-22-2048.jpg)
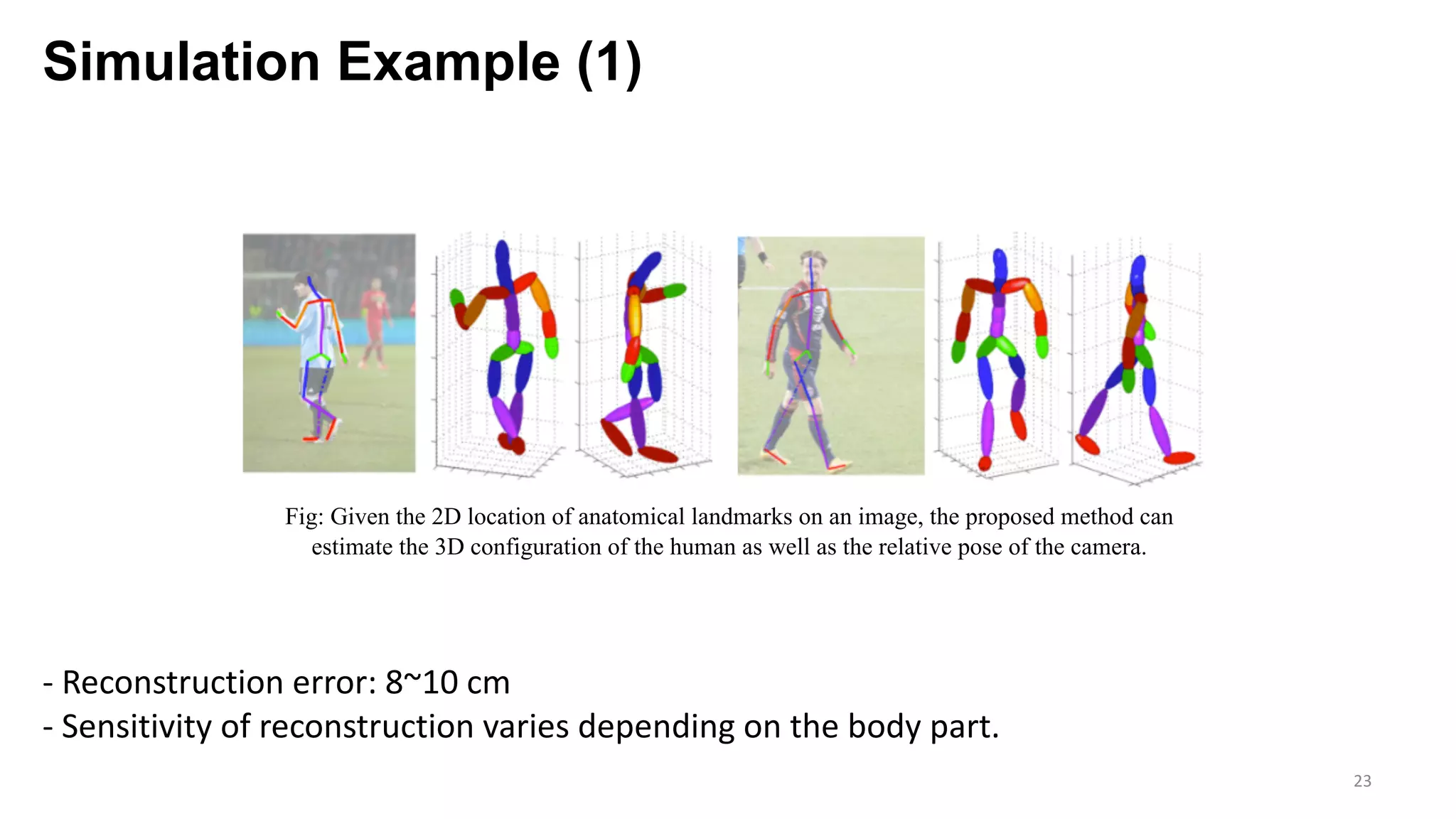
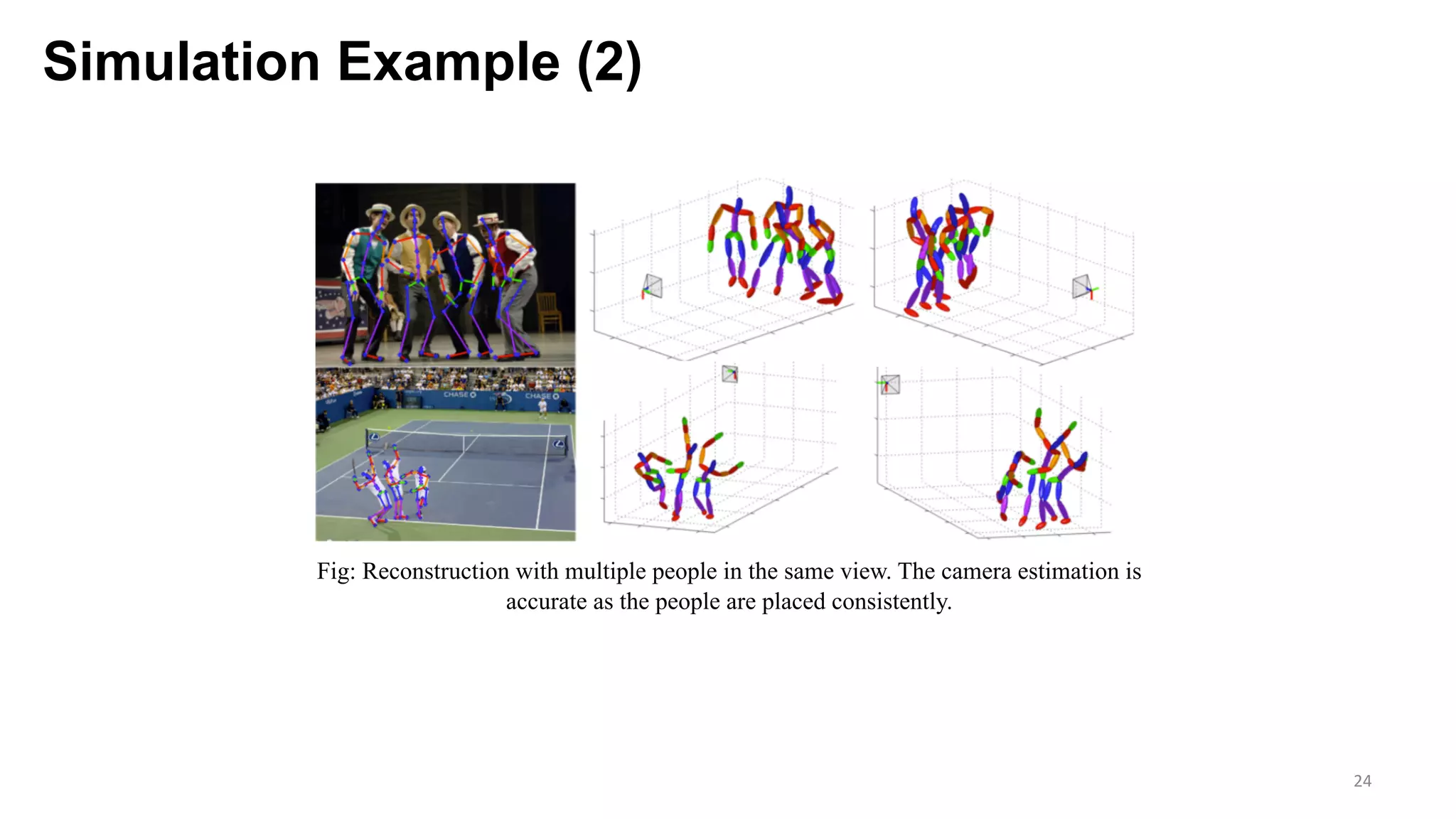
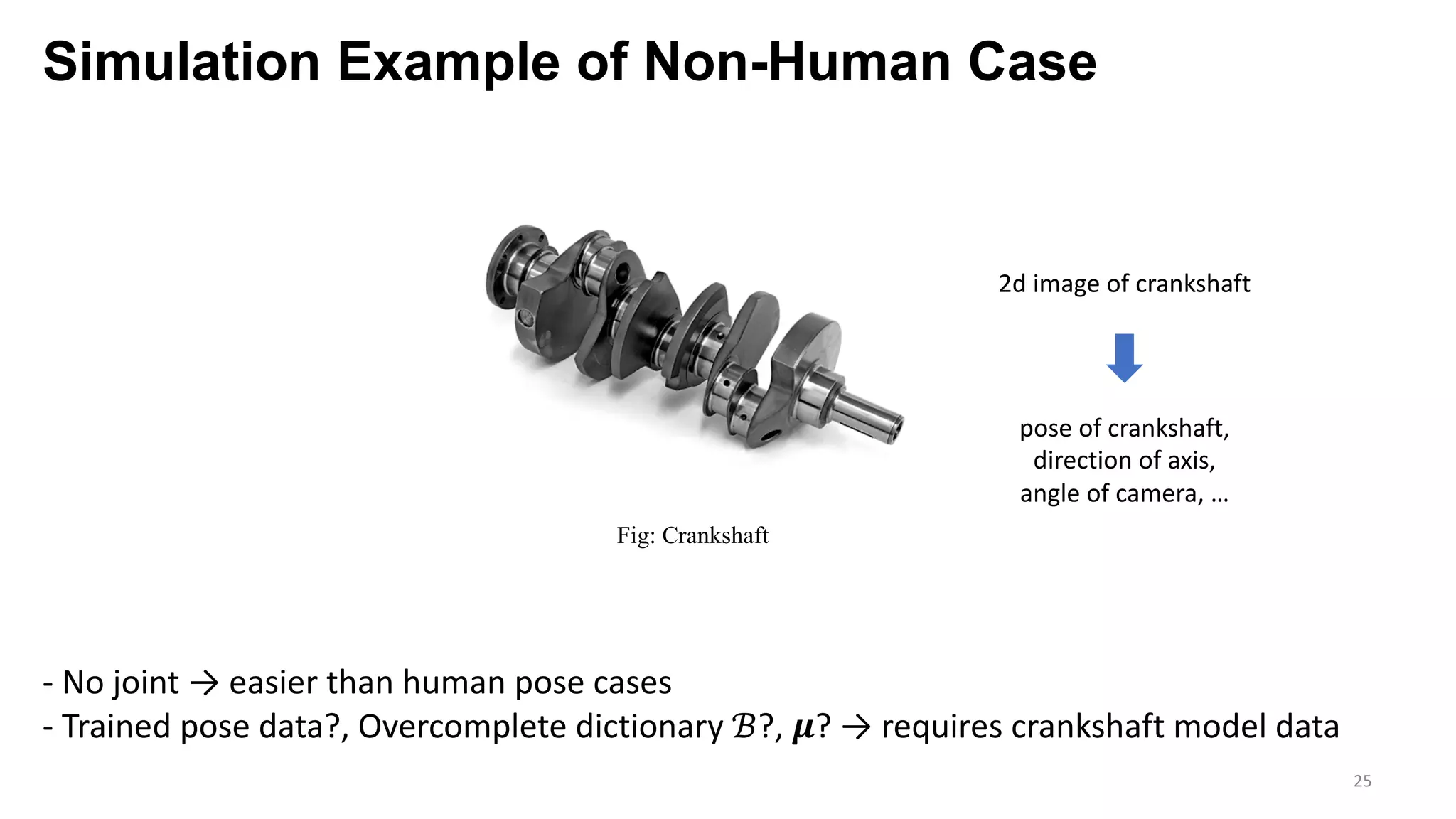
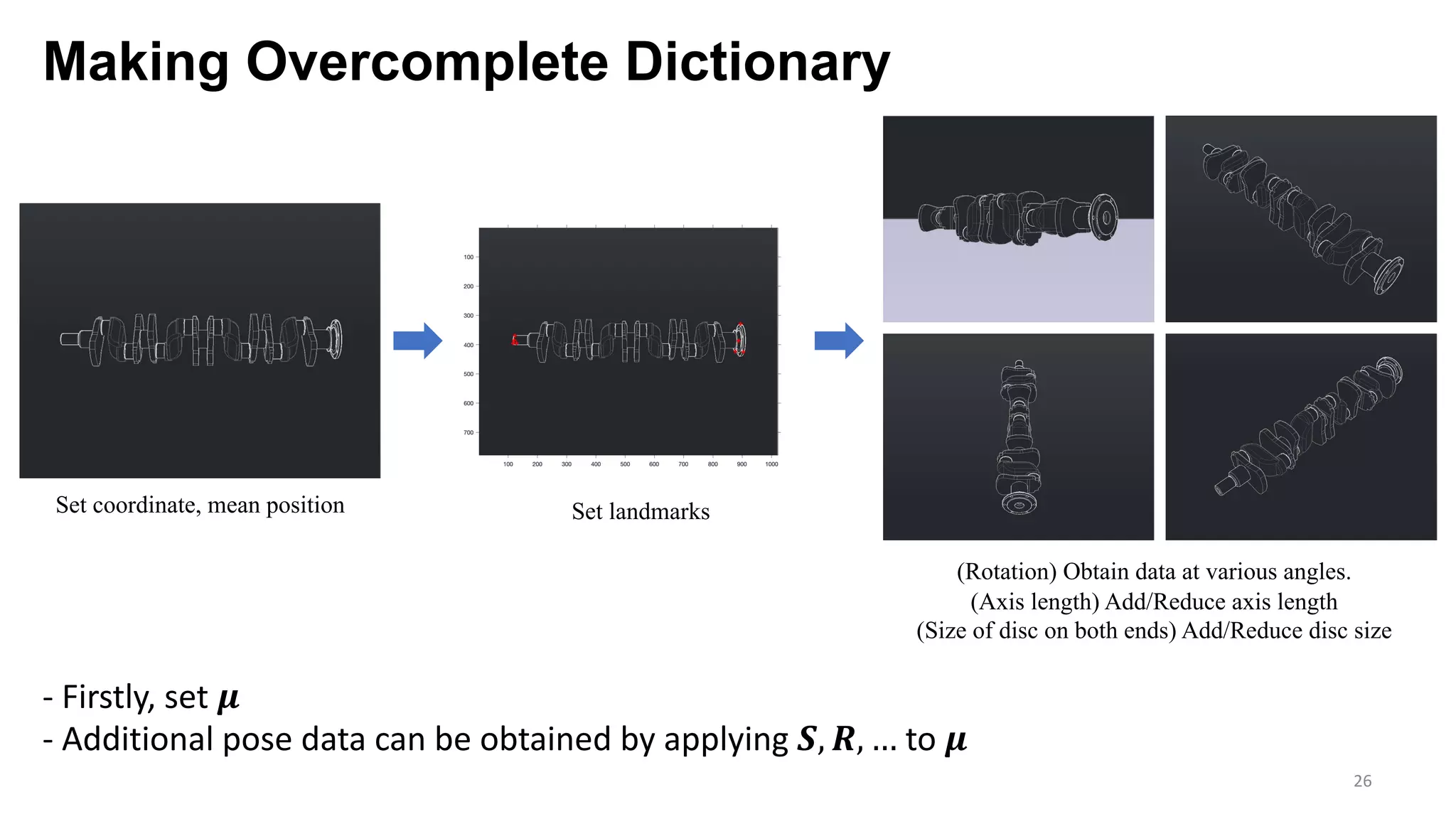
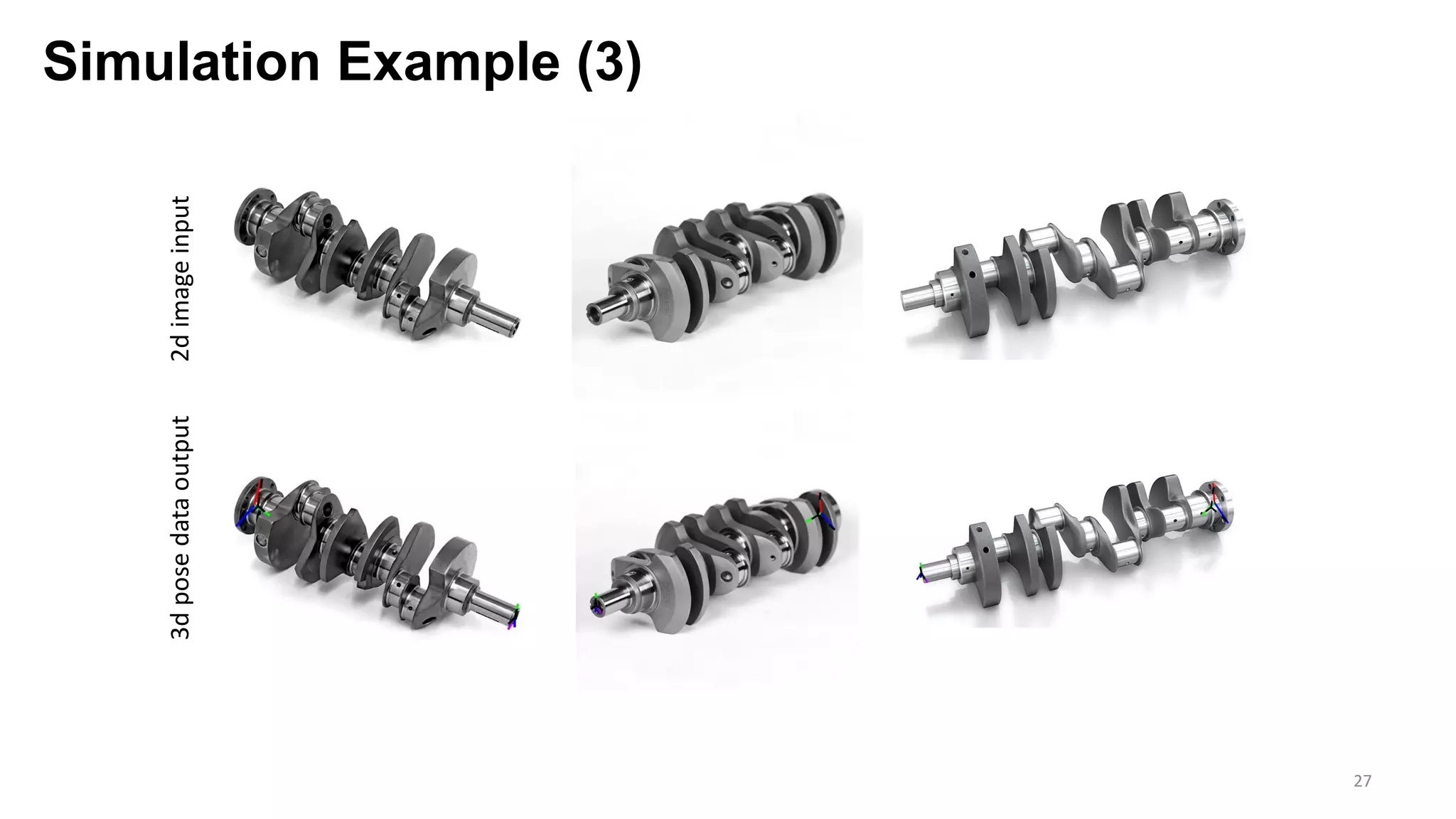


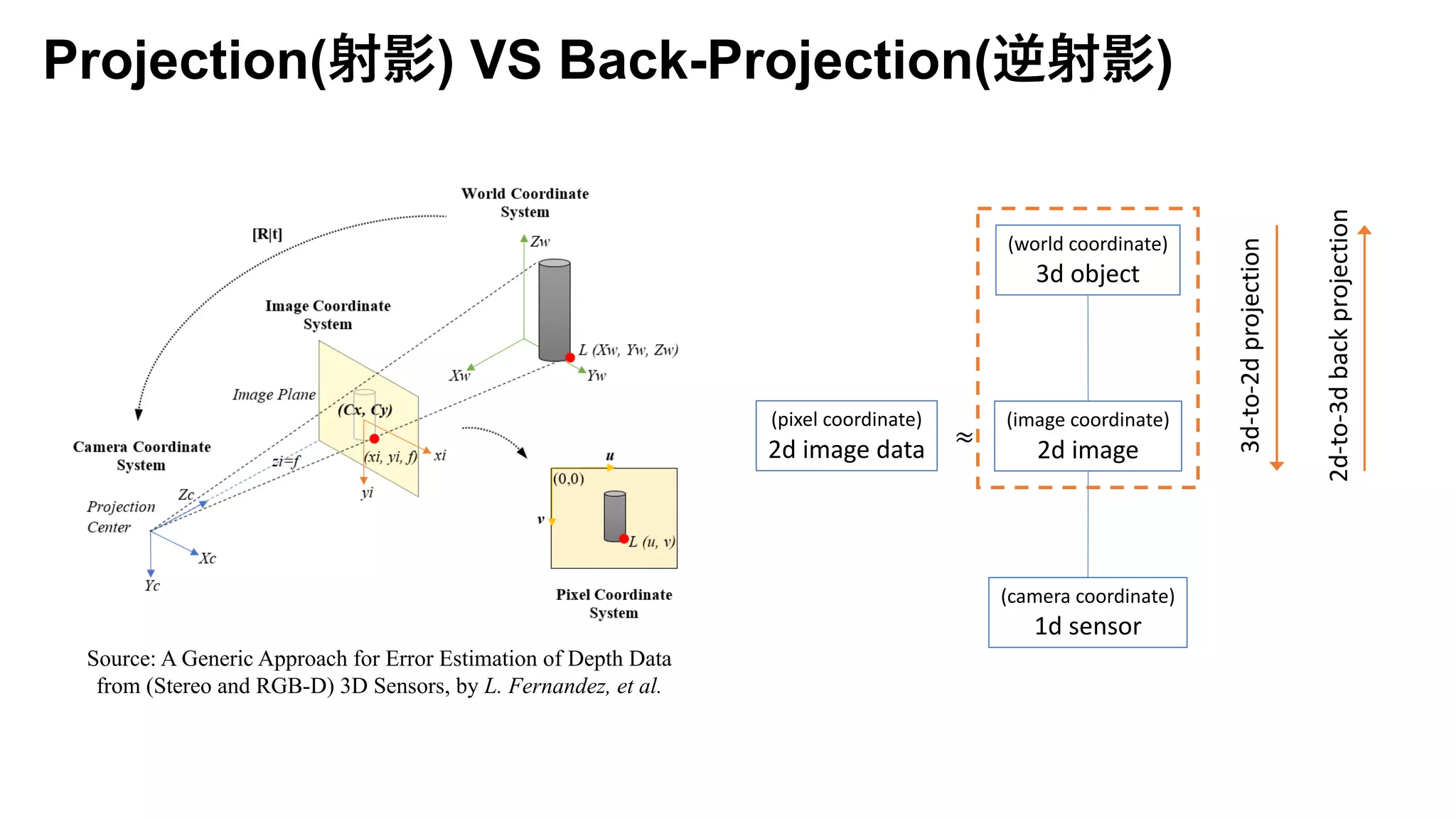
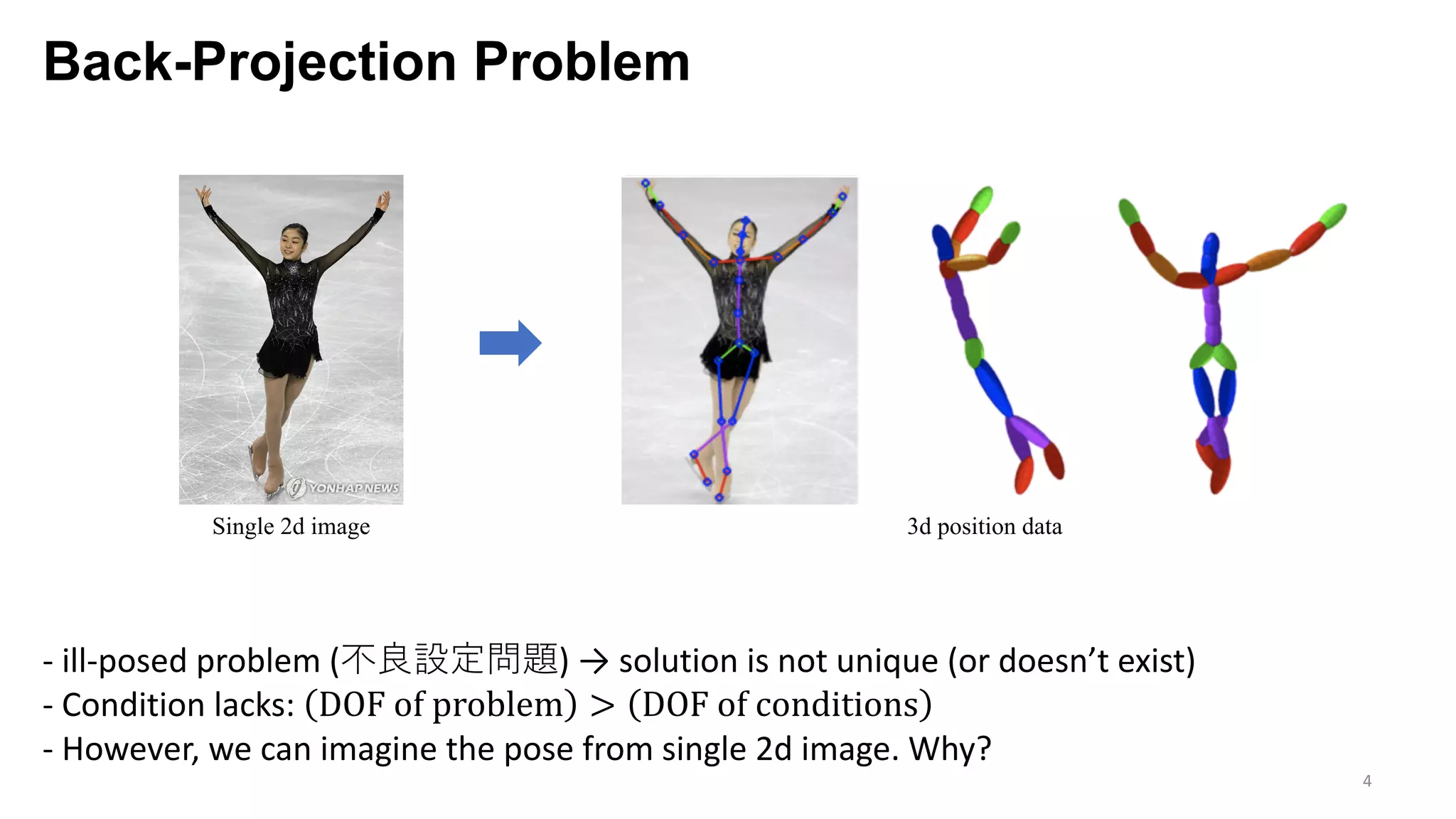
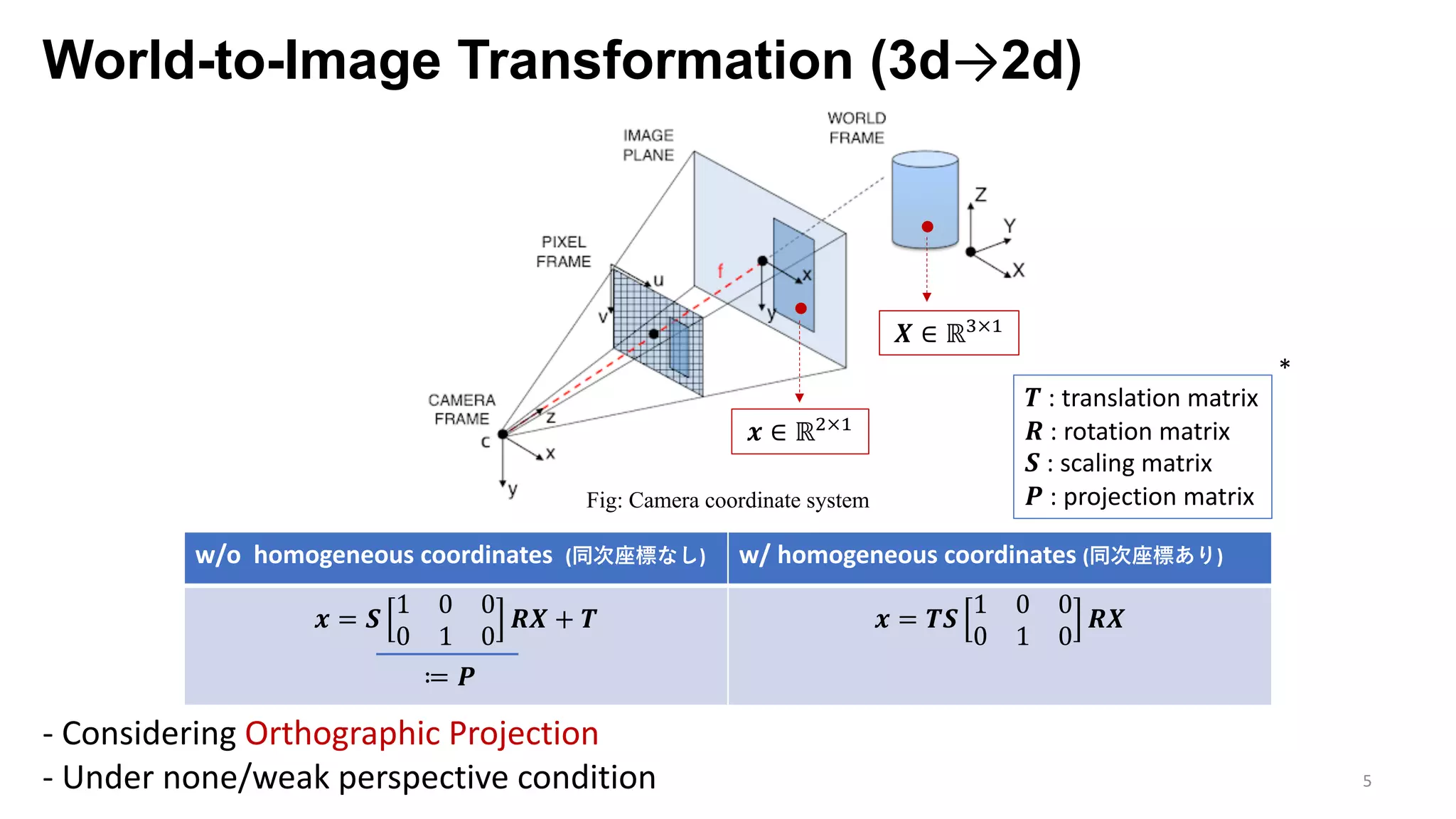
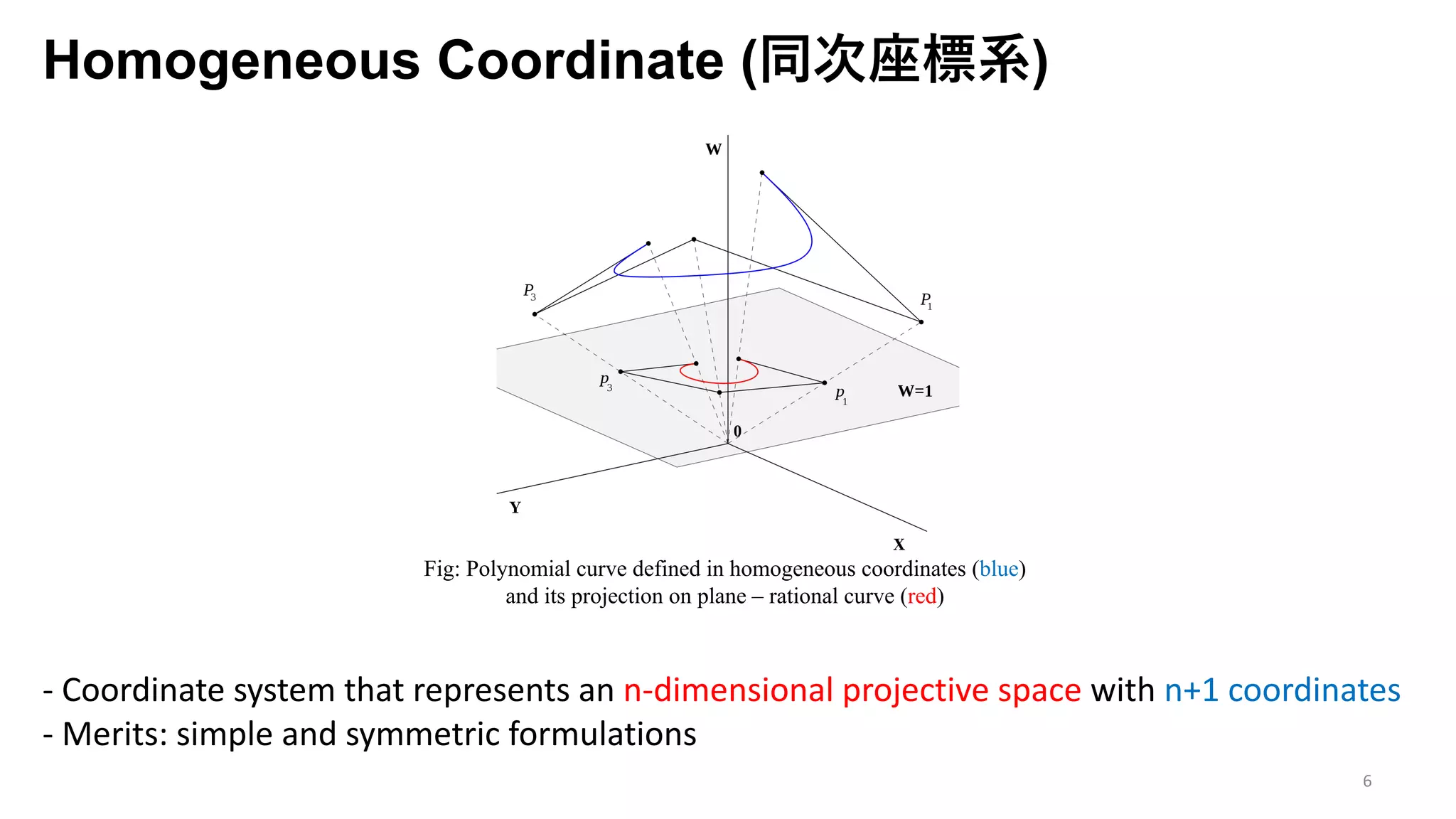
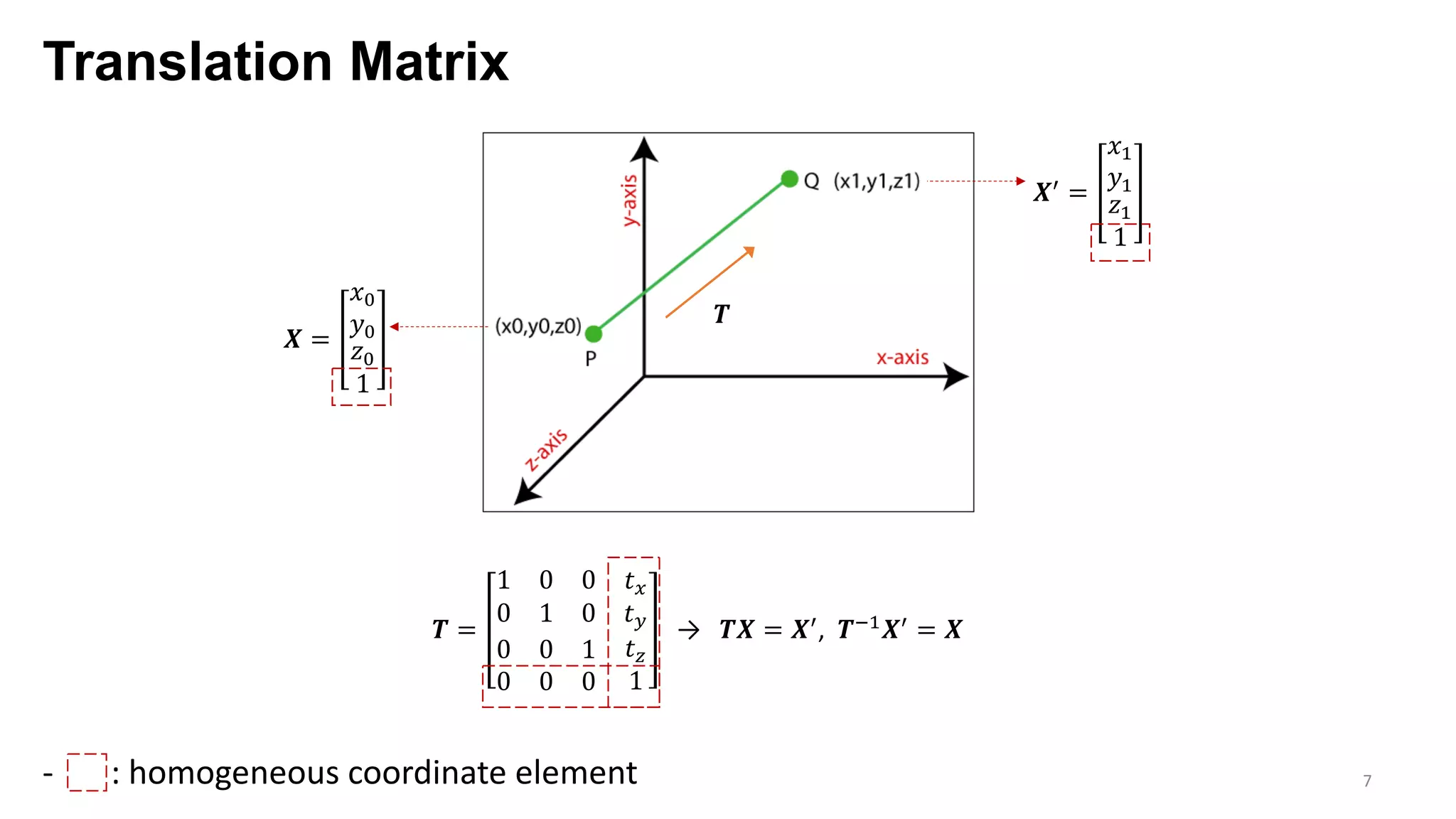
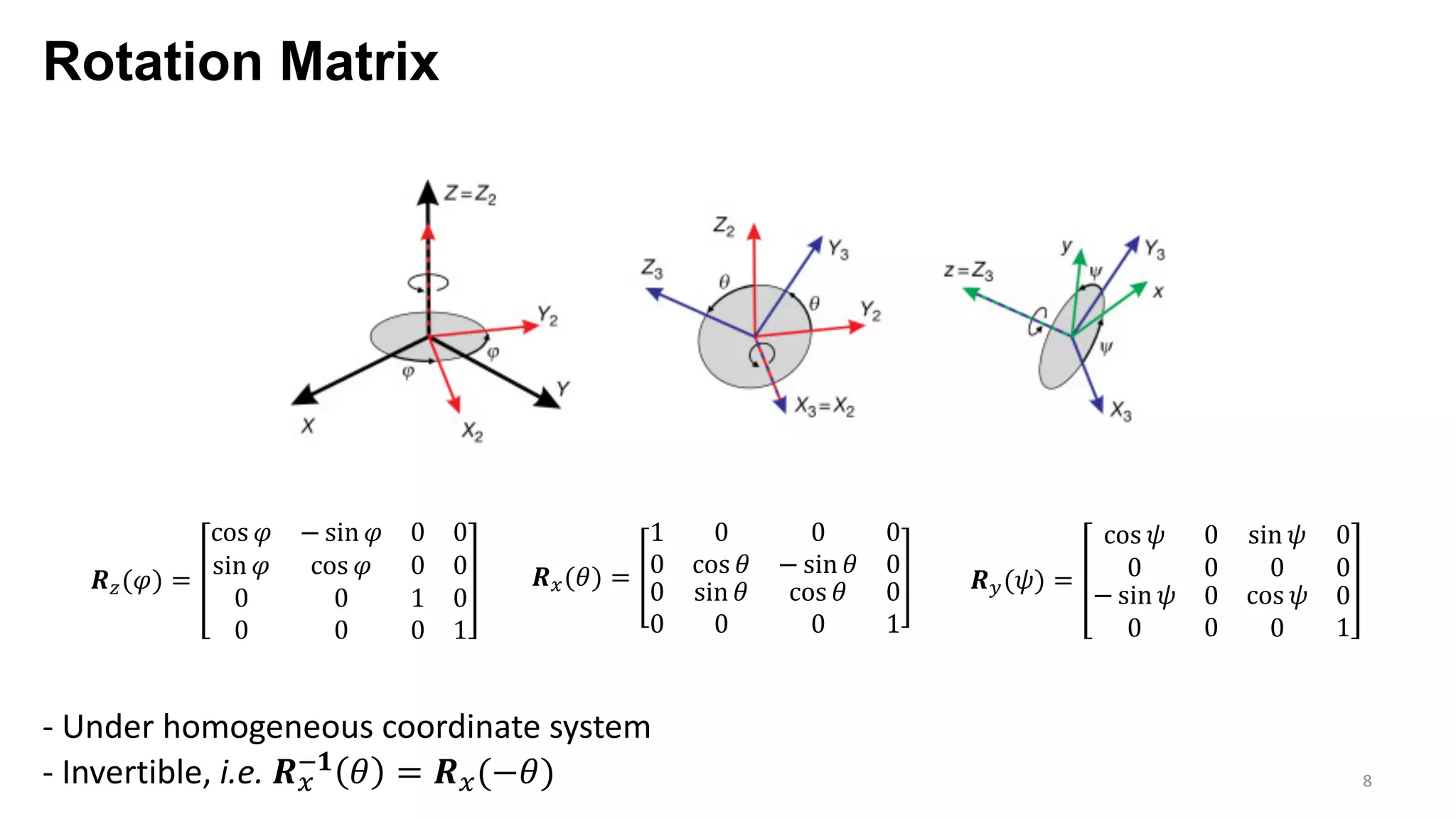
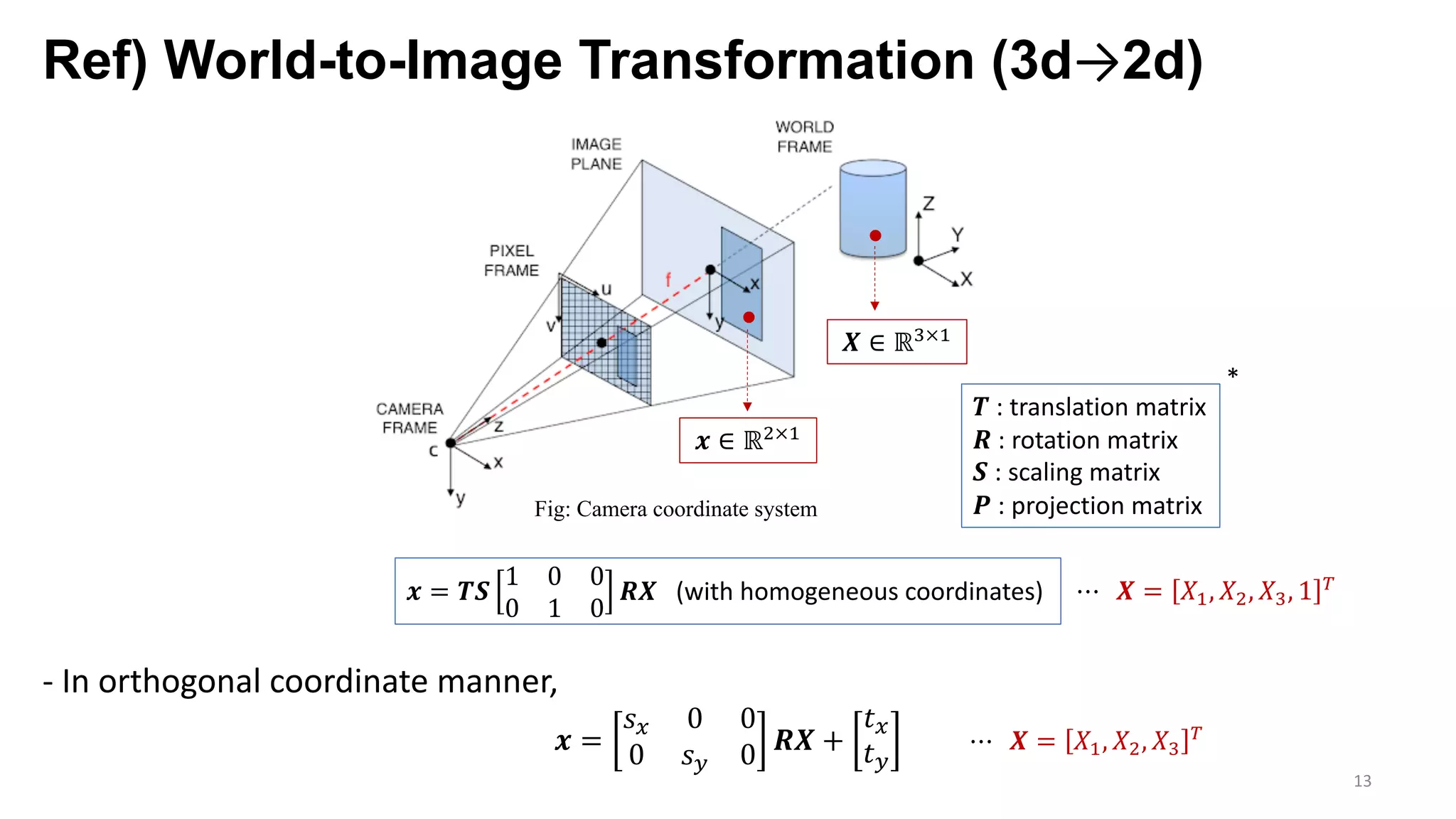
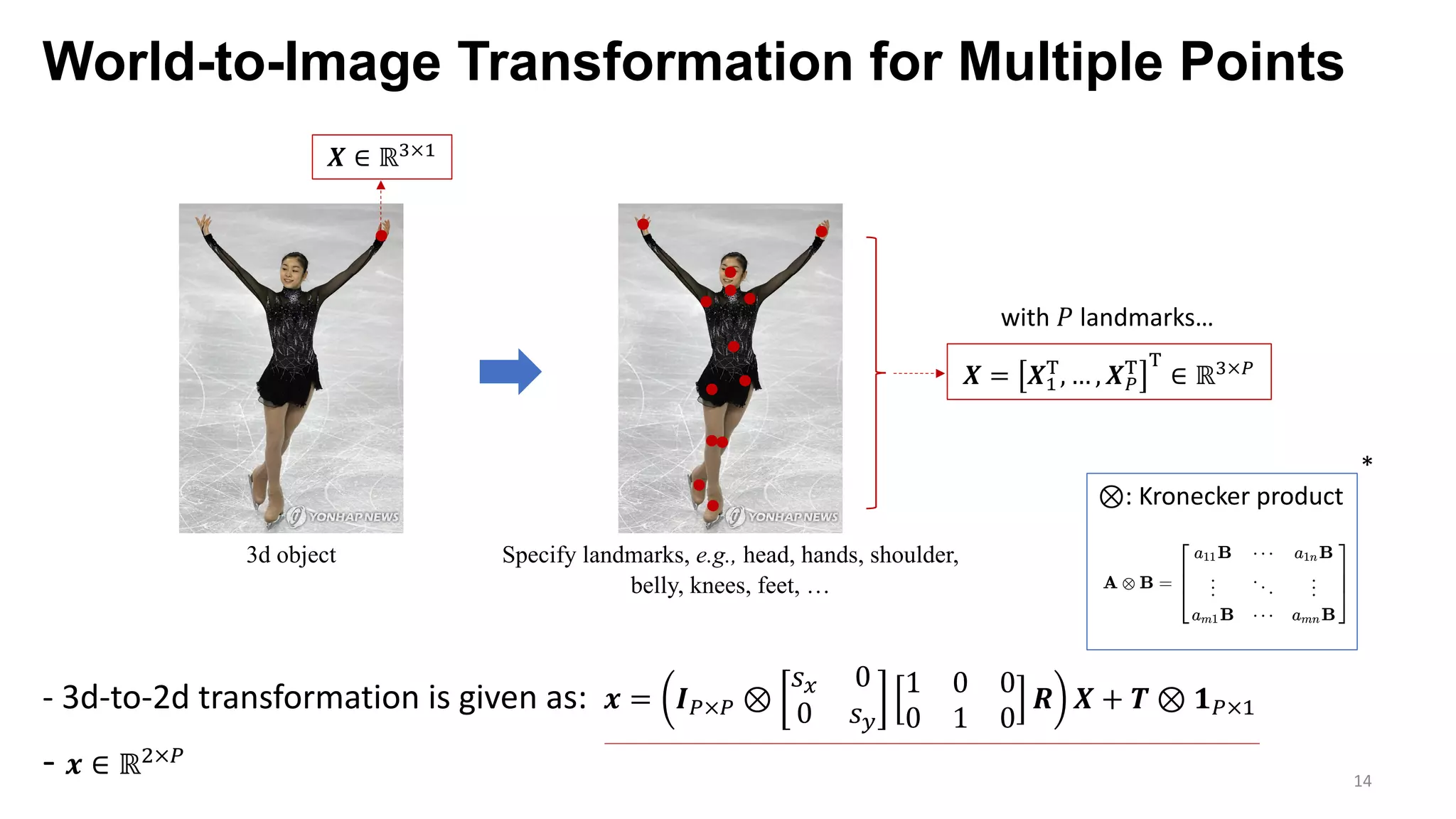
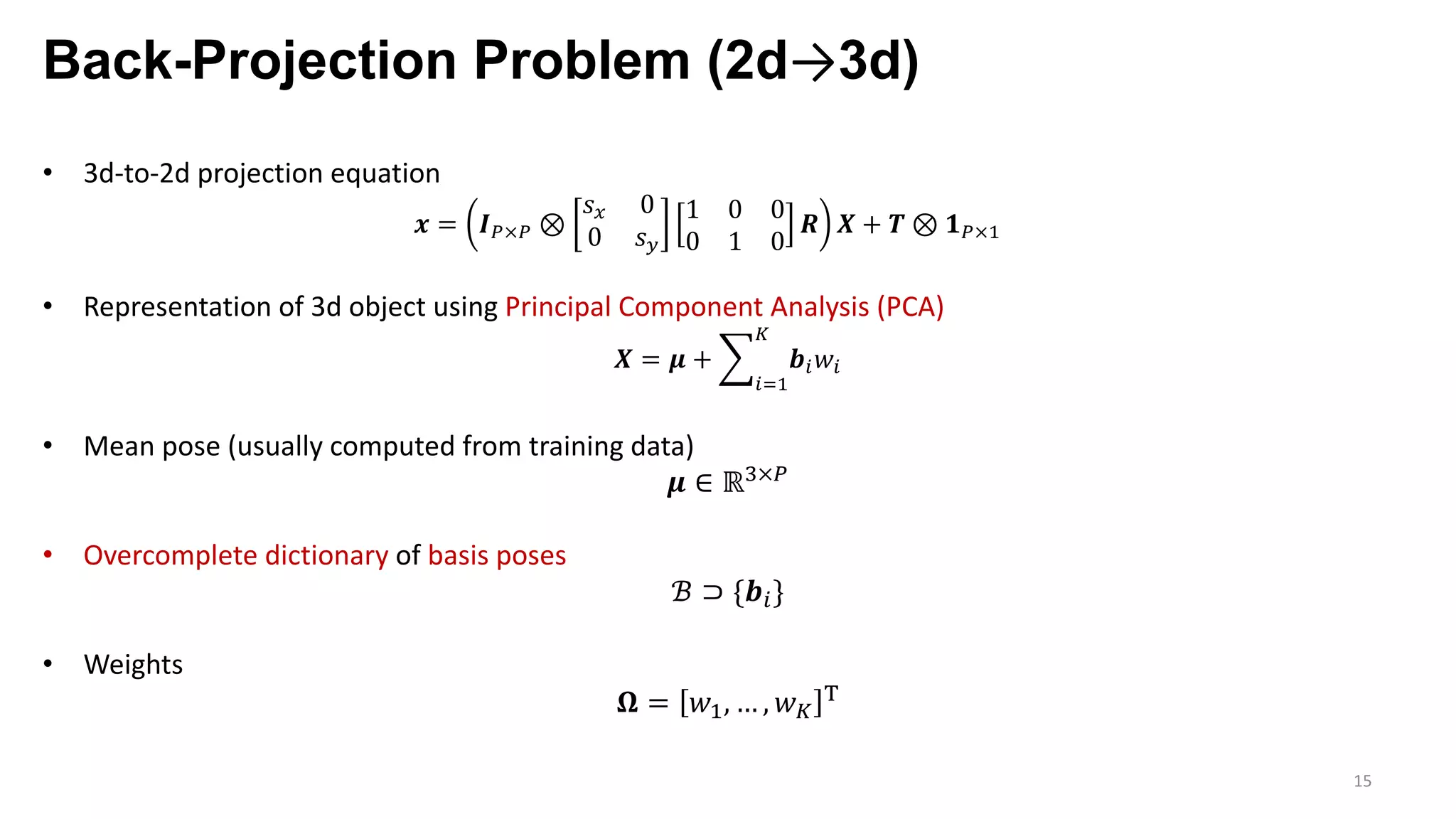
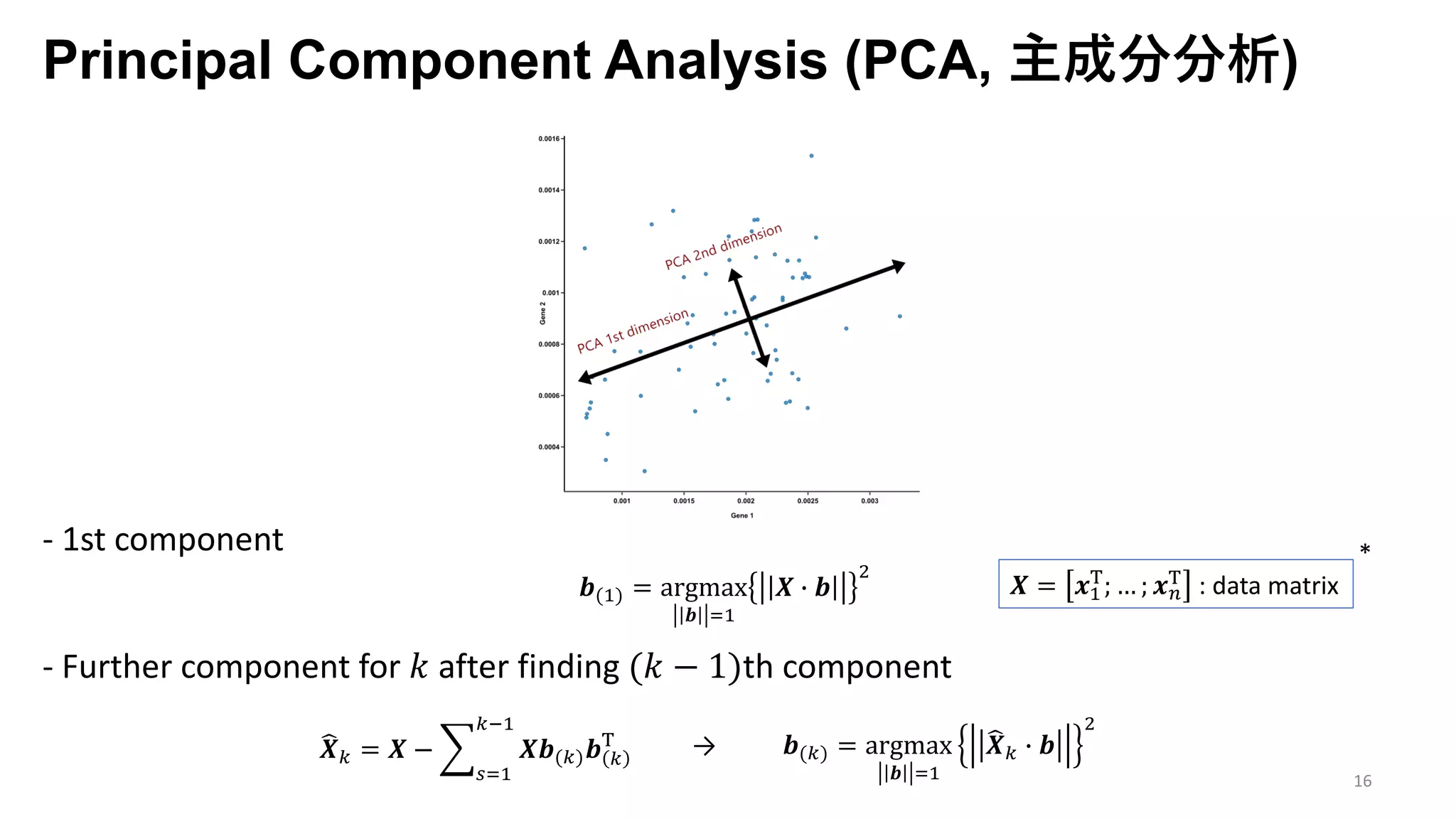
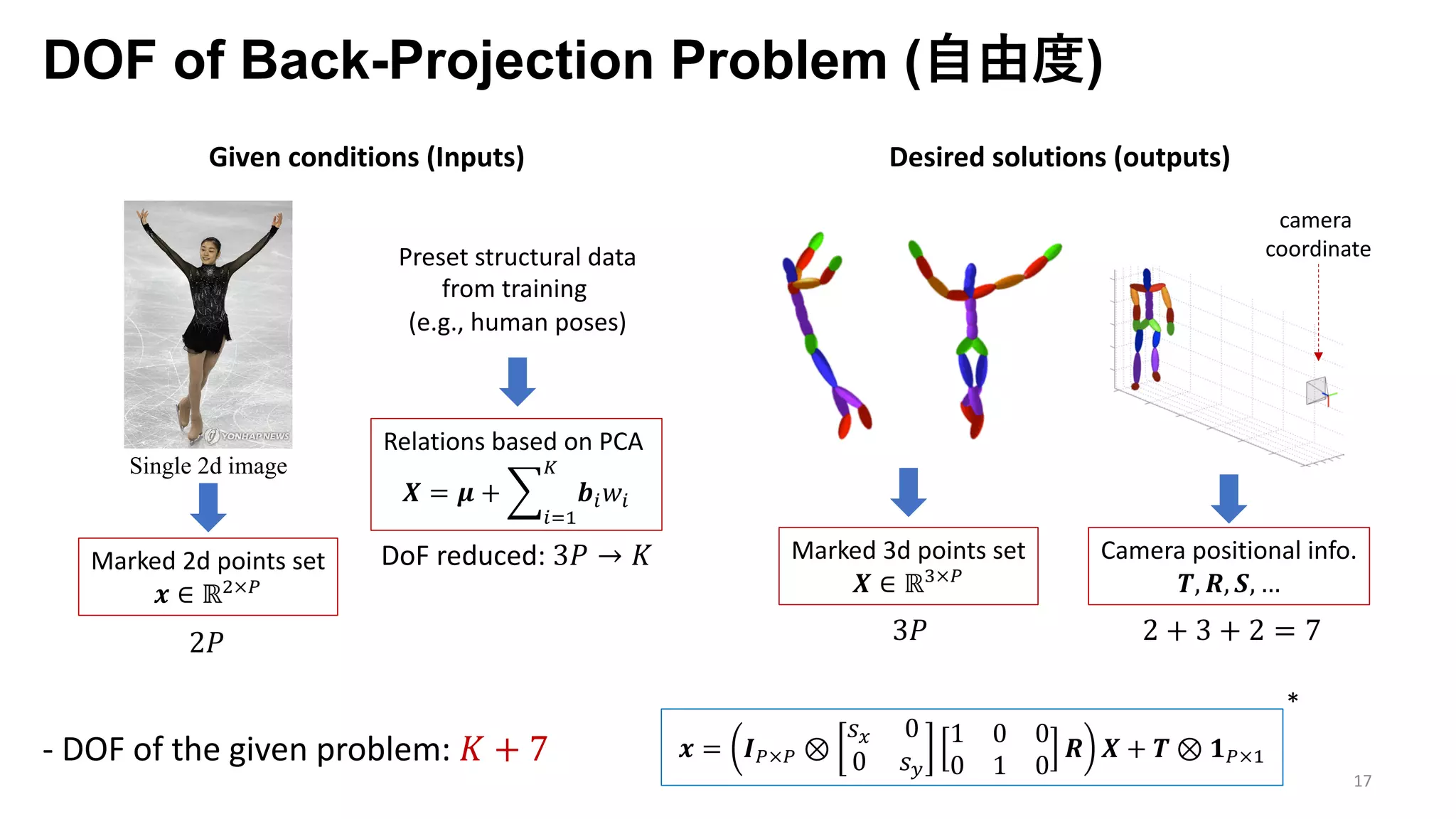
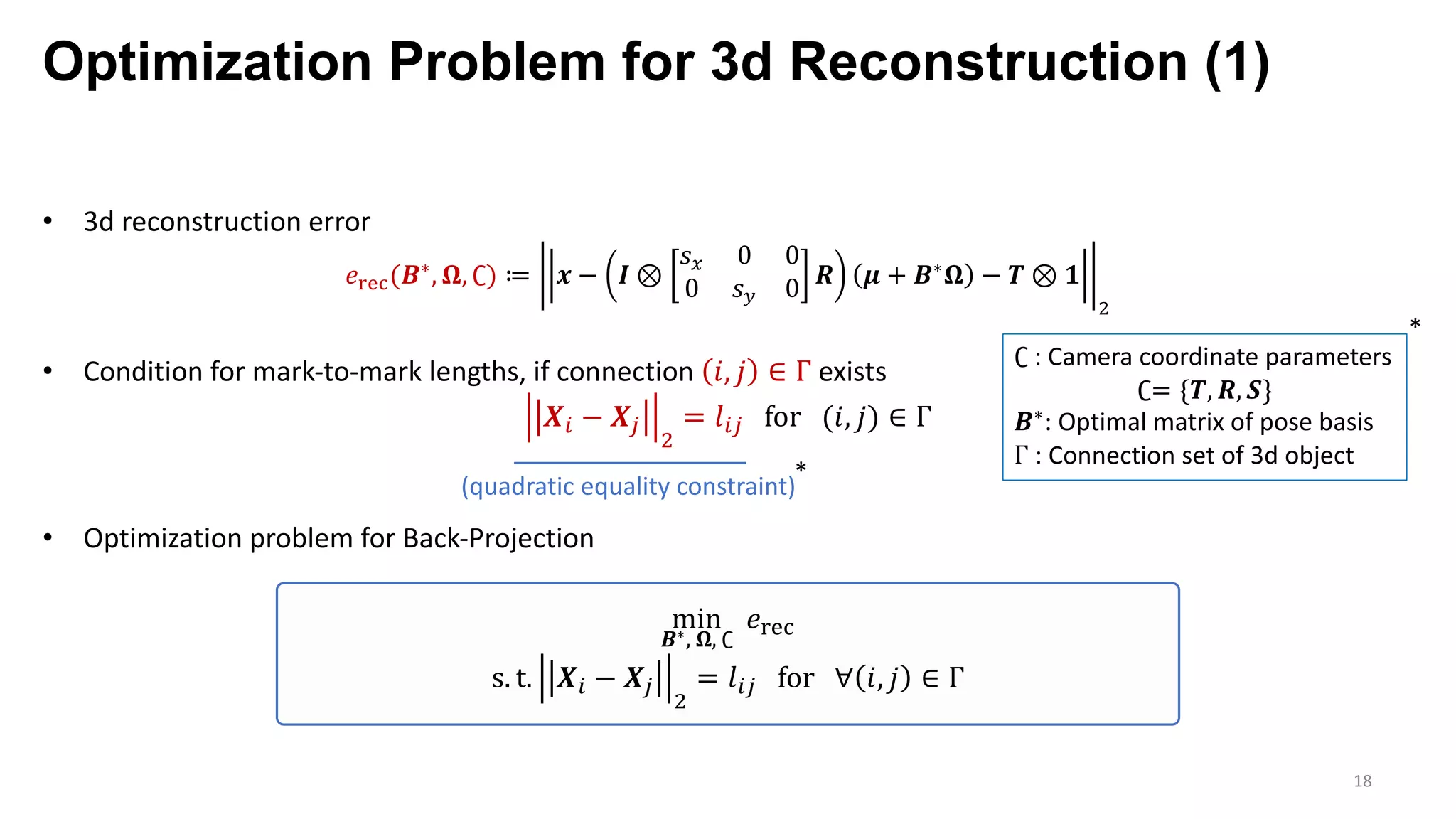
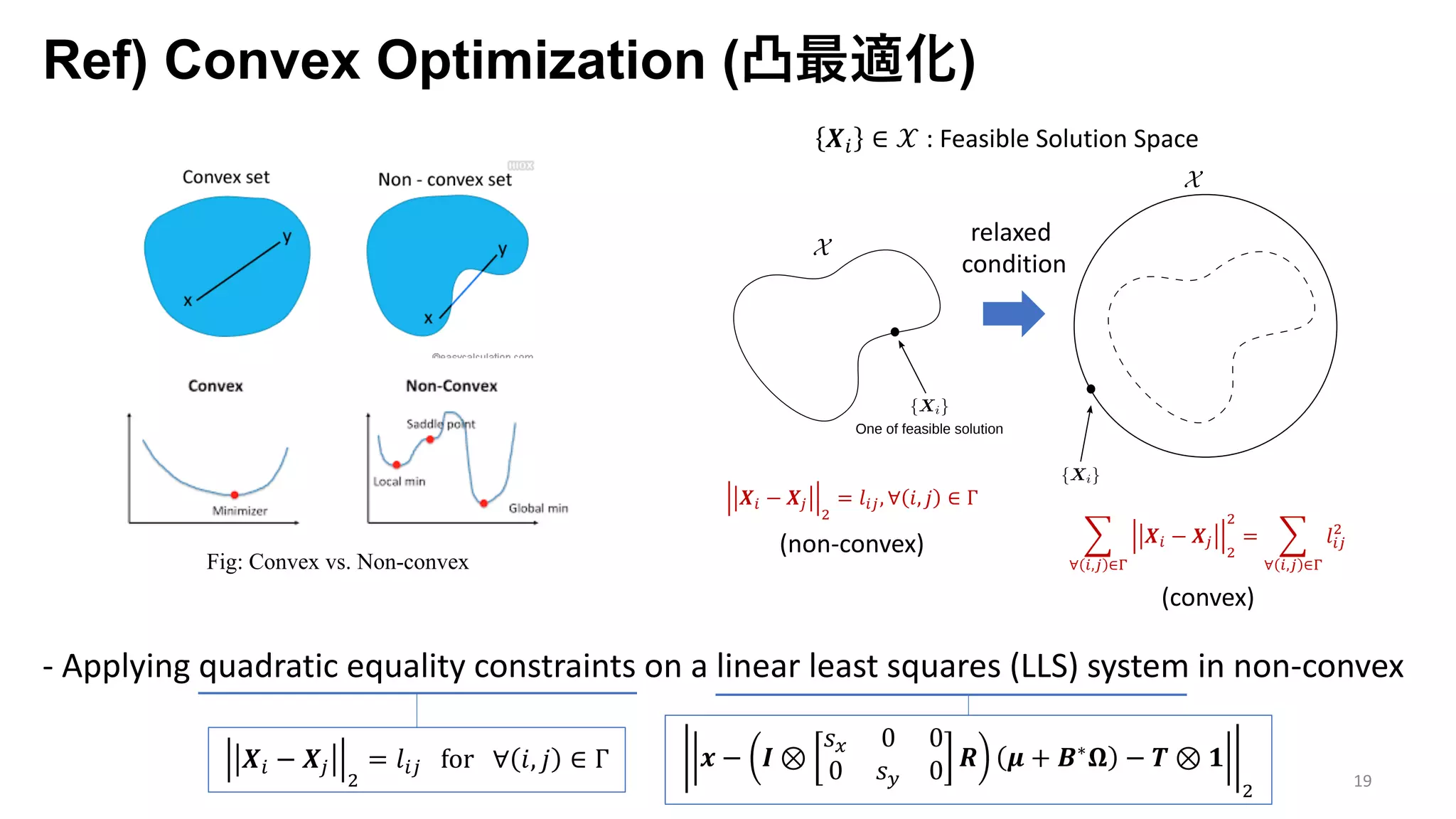
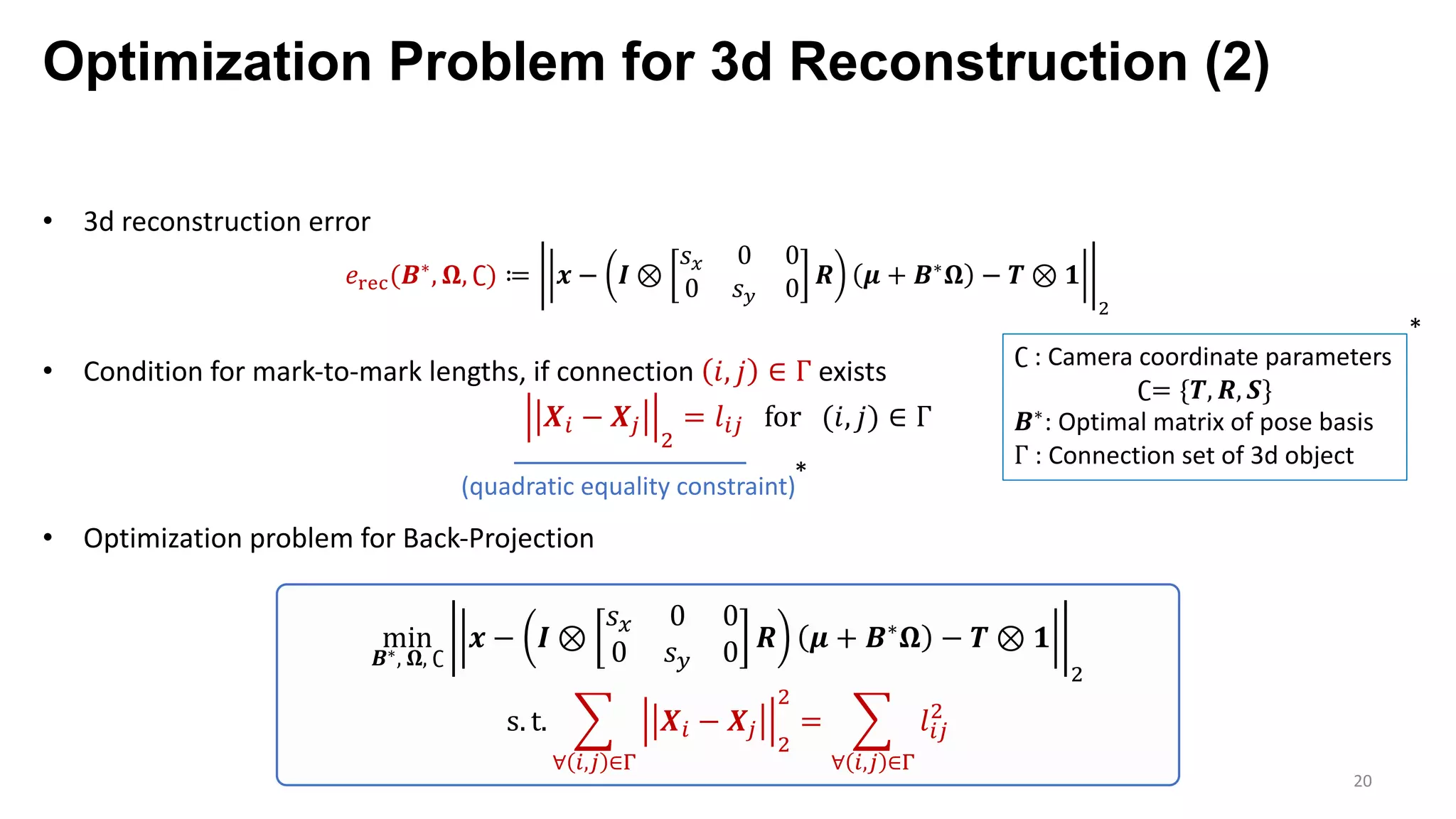
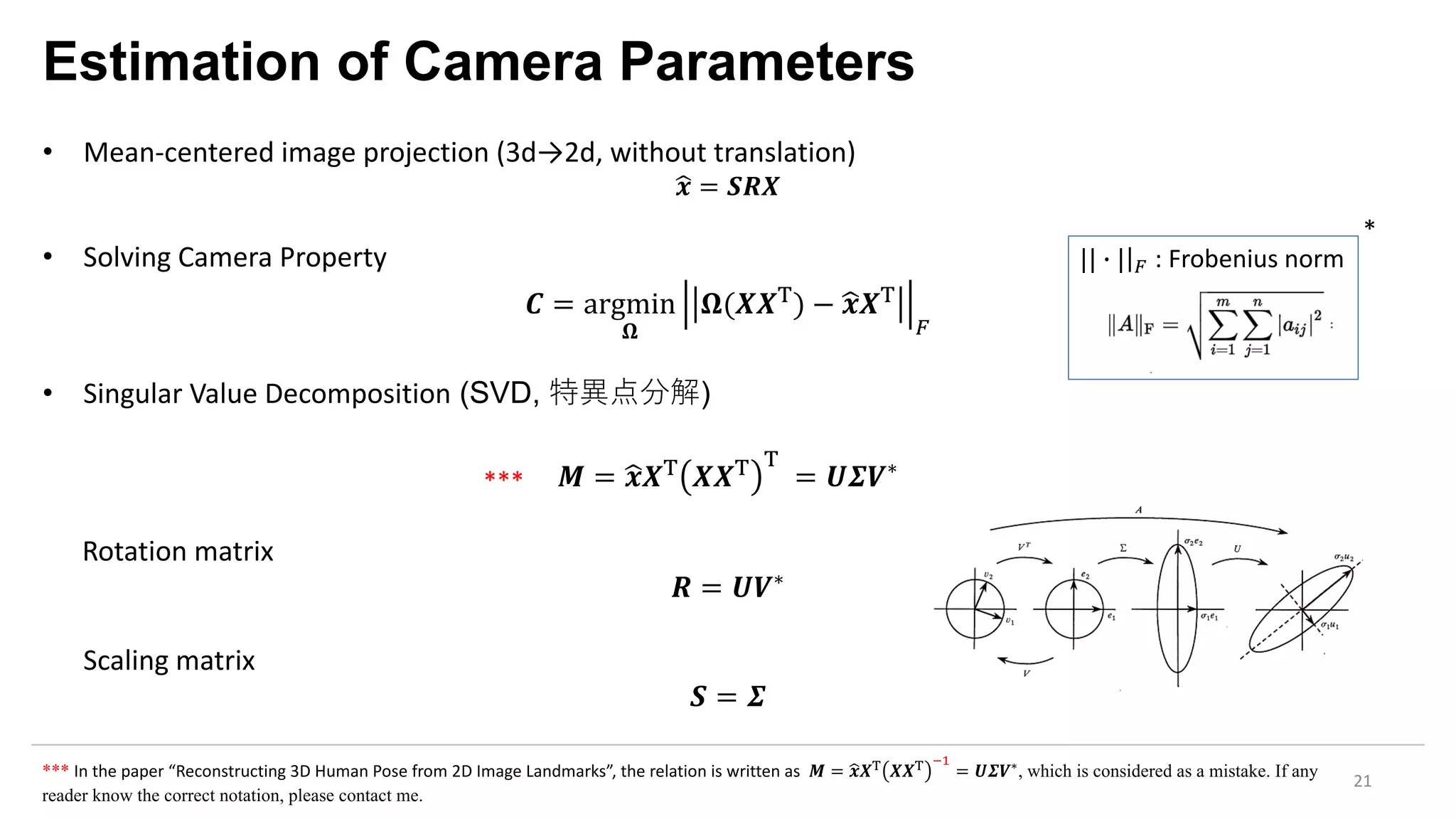
The document presents an exploration of the 2D-to-3D back-projection problem, focusing on various transformation methods and the optimization necessary for reconstructing 3D human poses from 2D image landmarks. Technical topics include world-to-image transformations, principal component analysis, and convex optimization, along with practical simulations demonstrating effectiveness. Theoretical foundations and potential applications are highlighted, alongside references to supporting literature and resources.


































































