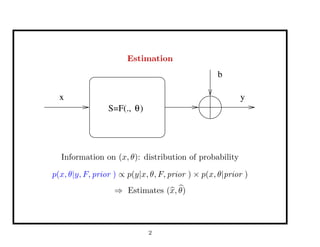
This document discusses recent advances in Markov chain Monte Carlo (MCMC) and sequential Monte Carlo (SMC) methods. It introduces Markov chain and sequential Monte Carlo techniques such as the Hastings-Metropolis algorithm, Gibbs sampling, data augmentation, and space alternating data augmentation. These techniques are applied to problems such as parameter estimation for finite mixtures of Gaussians.


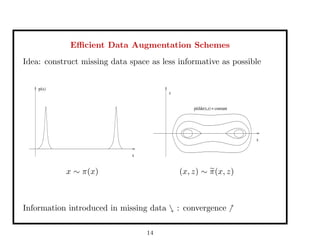
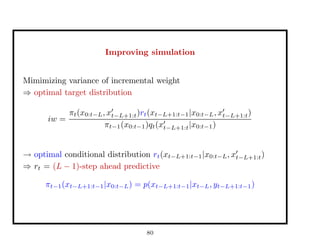
![Example
sample x ∼ p(x) ∝ 1
1+x2 20,000 iterations
x ∼ N(x , 0.12
)
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
x 10
4
−5
0
5
10
15
−6 −4 −2 0 2 4 6 8 10 12 14
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
acc. rate = 97%
x ∼ U[a,b]
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
x 10
4
−15
−10
−5
0
5
10
15
−15 −10 −5 0 5 10 15
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
acc. rate = 26%
10](https://image.slidesharecdn.com/65d692fa-f55c-4980-9d9c-58f5c1c6d0f3-160225000036/85/talk-MCMC-SMC-2004-10-320.jpg)




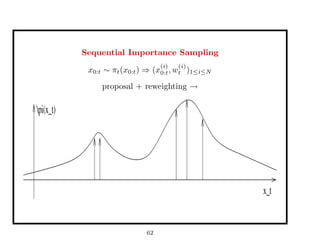
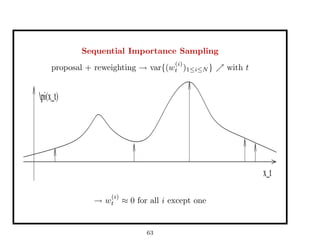






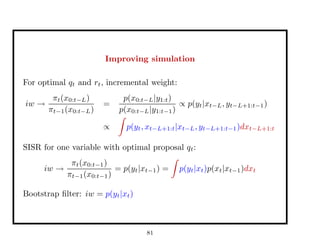
![Approximation of the target distribution
⇒ Effective Sample Size:
ESS =
1
N
i=1[w
(i)
t ]2
w(i)
= 1
N : ESS = N
pi(x_t)
x_t
w(i)
≈ 0 ∀i except one: ESS = 1
x_t
pi(x_t)
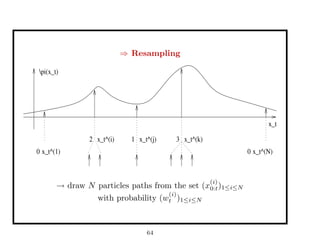
⇒ Resampling performed for ESS ≤ N
2 , N
10
83](https://image.slidesharecdn.com/65d692fa-f55c-4980-9d9c-58f5c1c6d0f3-160225000036/85/talk-MCMC-SMC-2004-83-320.jpg)