More Related Content

PDF
IoT時代におけるストリームデータ処理と急成長の Apache Flink 
PDF
Twitterのリアルタイム分散処理システム「Storm」入門 
PDF

PDF
Twitterのリアルタイム分散処理システム「Storm」入門 demo 
PDF

PPTX
Hadoop基盤上のETL構築実践例 ~多様なデータをどう扱う?~ 
PPTX

PDF
What's hot

PDF
Deep Learningハンズオン勉強会「Caffeで画像分類を試してみようの会」 
PDF
perfを使ったPostgreSQLの解析(前編) 
PDF

PDF

PDF

PDF

PDF

PDF

PDF
SIプロジェクトでのインフラ自動化の事例 (第1回 Puppetユーザ会 発表資料) 
PDF
Sparkによる GISデータを題材とした時系列データ処理 (Hadoop / Spark Conference Japan 2016 講演資料) 
PDF
今注目のSpark SQL、知っておきたいその性能とは 20151209 OSC Enterprise 
PDF
pg_bigm(ピージー・バイグラム)を用いた全文検索のしくみ(後編) 
PDF
PostgreSQLでpg_bigmを使って日本語全文検索 (MySQLとPostgreSQLの日本語全文検索勉強会 発表資料) 
PDF

PDF
![[C23] 「今」を分析するストリームデータ処理技術とその可能性 by Takahiro Yokoyama](https://cdn.slidesharecdn.com/ss_thumbnails/c23hitachiyokoyama-131215225816-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)
PDF
[C23] 「今」を分析するストリームデータ処理技術とその可能性 by Takahiro Yokoyama 
PDF
B14 「今」を分析するストリームデータ処理技術とその可能性 by Kazunori Tamura 
PPTX
Amazon RDS for PostgreSQL ( JPUG 2014夏セミナー) #jpug 
PDF
Hadoopのメンテナンスリリースバージョンをリリースしてみた (日本Hadoopユーザー会 ライトニングトーク@Cloudera World Tokyo... 
PDF
Viewers also liked

PDF
Hadoop ecosystem NTTDATA osc15tk 
PDF
Sparkコミュニティに飛び込もう!(Spark Meetup Tokyo 2015 講演資料、NTTデータ 猿田 浩輔) 
PDF
Spark MLlibではじめるスケーラブルな機械学習 
PDF
Ansibleで構成管理始める人のモチベーションをあげたい! (Cloudera World Tokyo 2014LT講演資料) 
PDF
データ活用をもっともっと円滑に!�~データ処理・分析基盤編を少しだけ~ 
PDF
Sparkをノートブックにまとめちゃおう。Zeppelinでね!(Hadoopソースコードリーディング 第19回 発表資料) 
PDF
Spark1.0での動作検証 - Hadoopユーザ・デベロッパから見たSparkへの期待 (Hadoop Conference Japan 2014) 
PDF

PDF
How to Use HazelcastMQ for Flexible Messaging and More 
PDF
HTrace: Tracing in HBase and HDFS (HBase Meetup) 
PDF

PDF
Prml 1.2,4 5,1.3|輪講資料1120 
PDF

PDF

PDF
Apache Hadoop 2.8.0 の新機能 (抜粋) 
PDF
Jubatusにおける大規模分散オンライン機械学習@先端金融テクノロジー研究会 
PDF
Apache Spark 1000 nodes NTT DATA 
PDF
Hadoop 2.6の最新機能(Cloudera World Tokyo 2014 LT講演資料) 
PDF

PDF
JuliaTokyo#4LT 僕とJuliaと時々Mocha @vaaaaanquish Similar to デブサミ2014-Stormで実現するビッグデータのリアルタイム処理プラットフォーム ~ストリームデータ処理から機械学習まで~

PDF
Storm×couchbase serverで作るリアルタイム解析基盤 
PDF

PDF
40分でわかるHadoop徹底入門 (Cloudera World Tokyo 2014 講演資料) 
PPTX
![[AWS Summit 2012] クラウドデザインパターン#5 CDP バッチ処理編](https://cdn.slidesharecdn.com/ss_thumbnails/aws-summit-cdp-05-121001104857-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)
PDF
[AWS Summit 2012] クラウドデザインパターン#5 CDP バッチ処理編 
PPTX

PDF

PDF

PDF
Typesafe Reactive Platformで作るReactive System入門 
PPTX
DataEngConf NYC’18 セッションサマリー #2 
PDF
Dataworks Summit 2017 SanJose StreamProcessing - Hadoop Source Code Reading #... 
PDF
Typesafe Reactive Platformで作るReactive System ![[社内勉強会]春の嵐を巻き起こせ Storm補完計画](https://cdn.slidesharecdn.com/ss_thumbnails/storm-160304020110-thumbnail.jpg?width=640&height=640&fit=bounds)
PPTX
[社内勉強会]春の嵐を巻き起こせ Storm補完計画 
PPTX

PDF
Smart Tennis Lesson Serverless Design 
PPT

PPTX
Hadoop scr第7回 hw2011フィードバック 
PDF
Hadoop Summit 2016 San Jose ストリーム処理関連の報告 #streamctjp 
PDF
Data-Intensive Text Processing with MapReduce(Ch1,Ch2) 
PDF
20111215 12 aws-meister-sqs_sns_sdb-public More from Takanori Suzuki

PDF
マイクロサービスにおけるテスト自動化 with Karate 
PDF
ServerlessConf Tokyo2018 サーバーレスなシステムのがんばらない運用監視 
PDF
SORACOM S+Cameraを利用して在庫チェックをやってみた 
PDF
Karateによる UI Test Automation 革命 
PDF
人生がときめくAPIテスト自動化 with Karate 
PDF
SQiP2012 - 質問表の活用によるプロジェクトの早期リスク検出 
PDF
5WCSQ - Quality Improvement by the Real-Time Detection of the Problems 
DOC
5WCSQ(CFP) - Quality Improvement by the Real-Time Detection of the Problems 
DOC
5WCSQ(CFP) - Quality Improvement by the Real-Time Detection of the Problems Recently uploaded

PDF
第21回 Gen AI 勉強会「NotebookLMで60ページ超の スライドを作成してみた」 
PDF
自転車ユーザ参加型路面画像センシングによる点字ブロック検出における性能向上方法の模索 (20260123 SeMI研) 
PDF
2025→2026宙畑ゆく年くる年レポート_100社を超える企業アンケート総まとめ!!_企業まとめ_1229_3版 
PDF
Starlink Direct-to-Cell (D2C) 技術の概要と将来の展望 
PDF
ST2024_PM1_2_Case_study_of_local_newspaper_company.pdf 
PDF
PMBOK 7th Edition Project Management Process Scrum 
PDF
Team Topology Adaptive Organizational Design for Rapid Delivery of Valuable S... 
PDF
PMBOK 7th Edition_Project Management Context Diagram 
PDF
100年後の知財業界-生成AIスライドアドリブプレゼン イーパテントYouTube配信 
PDF
FY2025 IT Strategist Afternoon I Question-1 Balanced Scorecard 
PDF
Reiwa 7 IT Strategist Afternoon I Question-1 3C Analysis 
PDF
PMBOK 7th Edition_Project Management Process_WF Type Development 
PDF
Reiwa 7 IT Strategist Afternoon I Question-1 Ansoff's Growth Vector デブサミ2014-Stormで実現するビッグデータのリアルタイム処理プラットフォーム ~ストリームデータ処理から機械学習まで~
- 1.
- 2.
- 3.
- 4.
- 5.
- 6.
- 7.
1. なぜ、リアルタイムが必要なのか?
ここに注目
Internet OfThings
(IoT)
http://www.businessinsider.com/decoding-smartphone-industry-jargon-2013-11
Copyright © Acroquest Technology Co., Ltd. All rights reserved.
7
- 8.
- 9.
2. ビッグデータ ×リアルタイム
これまでのビッグデータ処理
①
ログ解析によるサイトやサービス
に対するアクセス分析
②
大量データに対する処理の
時間短縮
③
レコメンドエンジンを利用した
サービス性向上
主にバッチで
処理する領域
今後求められるビッグデータ処理
① 不正利用・不正アクセス検知
② センサーデータを利用した
交通状況や自然状況の分析
③ 緊急災害時の対応
④ ユーザの直近の行動に基づく
サービス性向上
リアルタイム性が
求められる領域
Copyright © Acroquest Technology Co., Ltd. All rights reserved.
9
- 10.
- 11.
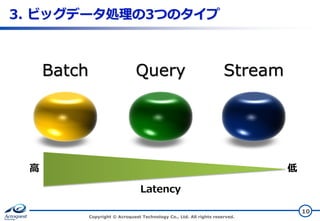
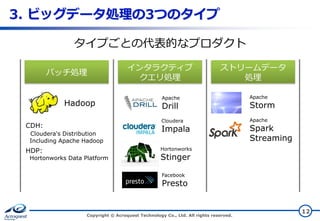
3. ビッグデータ処理の3つのタイプ
要件に応じて、単体 or組み合わせて利用
バッチ処理
インタラクティブ
クエリ処理
ストリームデータ
処理
実行タイミング
ユーザの指定や
定期的な実行
ユーザの指定や
定期的な実行
常時連続実行
処理単位
蓄積データを
一括で処理
蓄積データを
一括で処理
1~少数の
フローデータを処理
実行時間
分~時間
秒~分
ミリ秒~秒
処理モデル
MapReduce
クエリ, OLTP
Stream processing
Copyright © Acroquest Technology Co., Ltd. All rights reserved.
11
- 12.
- 13.
- 14.
5. ストリームデータ処理の適用モデル
リアルタイム
データ集計
大量データの
事前処理
• これまで、バッチとし
て集計していたものを、
リアルタイムに集計。
•大量データの事前整形
/フィルタリング/マ
ッチング等の処理を行
う。
• ユーザの行動やアクセ
ス状況に基づいたリア
ルタイムの判断/サー
ビスを可能にする。
• 必要(正確)なデータ
だけを扱えるようにす
る。
センサーデータの
集計/分析
セキュリティ
• 大量のセンサーデータ
を集計/分析。
• 近年、環境/ヘルスケ
ア/ウェアラブルなど
のセンサーやデバイス
の情報を扱うケースも
増えている。
Copyright © Acroquest Technology Co., Ltd. All rights reserved.
• ID不正利用、なりすま
しなどの異常行動を瞬
時に検知。
• 外部からの攻撃に対し
て、リアルタイムに対
応することが可能。
14
- 15.
- 16.
- 17.
1. Stormとは?
1. Twitter社がオープンソースとして公開した
分散リアルタイム処理フレームワーク
元々は、Twitterの分析を行っていたBackType社が開発
Nathan Marz 氏 が Lead Engineer
Twitter社がBackType社を買収し、OSSとして公開(2011/09/11)
2. ストリームデータ処理を実現するための代表的なOSS
コアエンジンはClojure、コンポーネントはJavaで実装されている
コンポーネント部分は、Scala, Rubyなど、他の言語での実装も可能
3. 2013/09/18より、Apache Incubaterとして
開発が進められている
Copyright © Acroquest Technology Co., Ltd. All rights reserved.
17
- 18.
- 19.
3. Stormの7つの特長
1. Integrates
簡単な統合
メッセージキューや、NoSQL/DBと簡単に連係して処理することが可能。
2.Simple API
シンプルなAPI
StormのAPIは非常にシンプルであり、複雑な処理を特に意識することなく、
分散リアルタイムシステムの開発可能。
3. Scalable
スケーラブル
Stormは複数のマシンで構成されるクラスタ上で並列分散的に動作し、膨大な数のメッセ
ージに対しても低レイテンシを維持しつつ、スケールする。
4. Fault tolerant
耐障害性
障害が発生し、処理中のノードがダウンした場合でも、Stormは必要に応じてタスクの再
割り当てやノードの再起動を行い、処理が完全に停止してしまうようなことがない。
Copyright © Acroquest Technology Co., Ltd. All rights reserved.
19
- 20.
3. Stormの7つの特長
5. Guaranteesdata processing
欠損のないデータ処理
何らかの理由により、データの処理に失敗したり、タイムアウトが発生したりした場合で
も、Stormはそれを検知し、再処理するしくみを有している。
この機構により、すべてのメッセージが処理されることを担保可能。
6. Use with any language
複数の開発言語サポート
Storm自体はClojureで実装されているが、ユーザが開発するアプリケーション部分は、
様々な言語で開発可能である。
Java, Scala, Ruby, Python, Perl, JavaScript, PHPなど、多くの言語をサポート。
7. Easy to deploy and operate
簡単なデプロイ・運用
Stormは簡単にデプロイし、動作させることができ、システム構成もわずかな設定で変更。
Amazon EC2などのクラウド環境でも動作させられる。
Copyright © Acroquest Technology Co., Ltd. All rights reserved.
20
- 21.
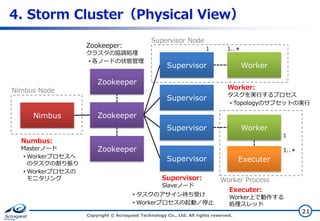
4. Storm Cluster(PhysicalView)
Supervisor Node
Zookeeper:
クラスタの協調処理
• 各ノードの状態管理
Nimbus Node
Nimbus
1
1..*
Supervisor
Zookeeper
Worker
Worker:
Supervisor
タスクを実行するプロセス
• Topologyのサブセットの実行
Zookeeper
Supervisor
Worker
Numbus:
Masterノード
• Workerプロセスへ
のタスクの割り振り
• Workerプロセスの
モニタリング
Zookeeper
1
1..*
Supervisor
Supervisor:
Slaveノード
• タスクのアサイン待ち受け
• Workerプロセスの起動/停止
Executer
Worker Process
Executer:
Worker上で動作する
処理スレッド
Copyright © Acroquest Technology Co., Ltd. All rights reserved.
21
- 22.
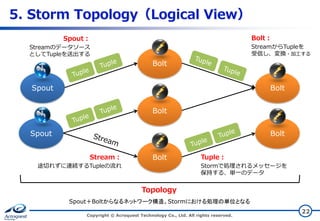
5. Storm Topology(LogicalView)
Bolt:
Spout:
StreamからTupleを
受信し、変換・加工する
Streamのデータソース
としてTupleを送出する
Bolt
Spout
Bolt
Bolt
Spout
Bolt
Stream:
Bolt
途切れずに連続するTupleの流れ
Tuple:
Stormで処理されるメッセージを
保持する、単一のデータ
Topology
Spout+Boltからなるネットワーク構造。Stormにおける処理の単位となる
Copyright © Acroquest Technology Co., Ltd. All rights reserved.
22
- 23.
6. Storm Keyfeatures
1. Stream groupings
ストリームの複数種類のグルーピング方法を提供している。
2. Distributed RPC
クエリ的に、ストリーム処理を実行する。アドホック、インタラクティブな実行。
3. Transactional
トランザクション的なストリーム処理も実行可能。
4. Trident
複数のTupleに対しての処理を可能にする。関数的な呼び出しで、集計・マージ・ジョイン
といった、CEP(Complex Event Processing)のような処理も簡単に実現可能。
5. Metrics
ストーム内部のメトリクス情報を取得可能。動作状況や異常の発生などの情報が分かりやす
く得られる。
Copyright © Acroquest Technology Co., Ltd. All rights reserved.
23
- 24.
- 25.
- 26.
- 27.
- 28.
3. 事例 ①Infochimps社のリアルタイム分析サービス
①政府系からビジネス系データまで、60,000を超える膨大なデータを提供する
Infochimps社のリアルタイム分析プラットフォームとして利用されている。
② Storm+Kafka をメインに、ストリームデータ処理をクラウド上で実現しており、
ビッグデータの提供を行っている。
http://blog.infochimps.com/2012/10/30/next-gen-real-time-streaming-storm-kafka-integration/
Copyright © Acroquest Technology Co., Ltd. All rights reserved.
28
- 29.
3. 事例 ②Loggly社のログマネジメントサービス
①クラウド・ベースでのログマネジメントを行っているLoggly社の第二世代
プラットフォームを、Kafka+Storm+Elasticsearchを利用して構築。
② Stormを利用して、イベント・パイプラインを構築。ログのリアルタイムでの
収集+インデックス作成に役立っている。
http://www.slideshare.net/AmazonWebServices/infrastructure-at-scale-apache-kafka-twitter-storm-elastic-searcharc303-aws-reinvent-2013
Copyright © Acroquest Technology Co., Ltd. All rights reserved.
29
- 30.
3. 事例 ③クラウド上でセンサーデータのリアルタイム判定+集計
①Cloudn(クラウド・エヌ)上で、センサーデータをリアルタイムに収集・処理
② リアルタイムで、データの閾値判定処理と一定間隔での集計処理を、常時並列実行
センサー群
結果の出力
イベント
受信
Storm
取得
リアルタイム
閾値判定
判定
通知
解析
RabbitMQ
保存
取得
保存
ストリーム
データ集計
グラフ表示
一時
データ保存
表示用
データ保存
Copyright © Acroquest Technology Co., Ltd. All rights reserved.
30
- 31.
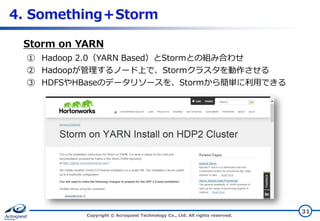
4. Something+Storm
Storm onYARN
① Hadoop 2.0(YARN Based)とStormとの組み合わせ
② Hadoopが管理するノード上で、Stormクラスタを動作させる
③ HDFSやHBaseのデータリソースを、Stormから簡単に利用できる
Copyright © Acroquest Technology Co., Ltd. All rights reserved.
31
- 32.
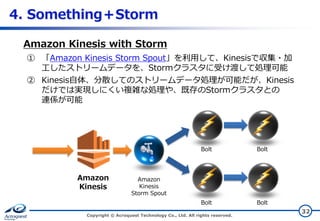
4. Something+Storm
Amazon Kinesiswith Storm
① 「Amazon Kinesis Storm Spout」を利用して、Kinesisで収集・加
工したストリームデータを、Stormクラスタに受け渡して処理可能
② Kinesis自体、分散してのストリームデータ処理が可能だが、Kinesis
だけでは実現しにくい複雑な処理や、既存のStormクラスタとの
連係が可能
Bolt
Bolt
Amazon
Kinesis
Bolt
Bolt
Amazon
Kinesis
Storm Spout
Copyright © Acroquest Technology Co., Ltd. All rights reserved.
32
- 33.
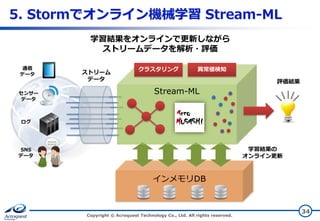
5. Stormでオンライン機械学習 Stream-ML
AcroMUSASHIStream:
Stormをベースとした
ストリームデータの分散処理プラットフォーム
• Stormをより簡単に使いこなすためのエコシステム
• データの収集/受信、データの格納までをシームレスに連結
• 分散システムの立ち上げをより迅速に
https://github.com/acromusashi
2014/01/30
オンライン機会学習
ライブラリ
AcroMUSASHI
Stream-ML
機械学習
をリリース!
Storm
Copyright © Acroquest Technology Co., Ltd. All rights reserved.
With
33
- 34.
- 35.
- 36.
5. Stormでオンライン機械学習 Stream-ML
特長
①スケーラビリティを備えた高速分散処理
② 機械学習のアルゴリズム単体ではなく、
データ分析全体のリアルタイム分散処理が可能
対応済みのアルゴリズム
クラスタリング
(K-means)
外れ値検知
(LOF)
変化点検出
(ChangeFinder)
Copyright © Acroquest Technology Co., Ltd. All rights reserved.
36
- 37.
- 38.
- 39.
- 40.

![自己紹介
{
“氏名”
“所属”
“Twitter”
“Facebook”
“分野”
:
:
:
:
:
”鈴木 貴典”
“Acroquest Technology Co., Ltd.”
“@takanorig”
“https://www.facebook.com/takanorig”
[“SEPG”, “Testing”, “Management”,
”Framework”, ”Platform”]
}
Copyright © Acroquest Technology Co., Ltd. All rights reserved.
2](https://image.slidesharecdn.com/2014021313-e-5storm-140213014252-phpapp01/85/2014-Storm-2-320.jpg)