Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
Masaki Ito
PDF, PPTX
3,516 views
西日本豪雨で止まった「広島の公共交通情報提供」のその後
2021年3月6日開催「公共交通オープンデータ最前線 in インターナショナルオープンデータデイ2021」における神田佑亮氏(呉工業高等専門学校)の発表資料です。
Technology
◦
Read more
0
Save
Share
Embed
Embed presentation
Download
Download as PDF, PPTX
1
/ 19
2
/ 19
3
/ 19
4
/ 19
5
/ 19
6
/ 19
7
/ 19
8
/ 19
9
/ 19
10
/ 19
11
/ 19
12
/ 19
13
/ 19
14
/ 19
15
/ 19
16
/ 19
17
/ 19
18
/ 19
19
/ 19
More Related Content
PDF
公共交通オープンデータの現在地と今後の展望
by
Masaki Ito
PDF
公共交通のデジタル化の現状とMaaS、データ活用の可能性
by
Masaki Ito
PDF
20190513 est hiroshima
by
Kenji Morohoshi
PDF
20200529 kanda
by
masa_f
PDF
広島における災害時の公共交通情報提供プロジェクト
by
Masaki Ito
PDF
20190719 JCOMM賞受賞者セッション_西日本豪雨災害時の公共交通情報提供プロジェクト
by
Kenji Morohoshi
PPTX
20131106 gisシステム学会 web大会原稿_柳川
by
Ryoichi Yanagawa
PDF
災害時の公共交通情報提供の実現〜西日本豪雨の際の広島〜呉間での実践を例に〜
by
Masaki Ito
公共交通オープンデータの現在地と今後の展望
by
Masaki Ito
公共交通のデジタル化の現状とMaaS、データ活用の可能性
by
Masaki Ito
20190513 est hiroshima
by
Kenji Morohoshi
20200529 kanda
by
masa_f
広島における災害時の公共交通情報提供プロジェクト
by
Masaki Ito
20190719 JCOMM賞受賞者セッション_西日本豪雨災害時の公共交通情報提供プロジェクト
by
Kenji Morohoshi
20131106 gisシステム学会 web大会原稿_柳川
by
Ryoichi Yanagawa
災害時の公共交通情報提供の実現〜西日本豪雨の際の広島〜呉間での実践を例に〜
by
Masaki Ito
More from Masaki Ito
PDF
IT・データが導く新しい地域公共交通の姿を考える
by
Masaki Ito
PDF
GTFSデータ整備から始める公共交通の未来像
by
Masaki Ito
PDF
公共交通オープンデータの現状と可能性 社会がデータを使いこなすために何をなすべきか
by
Masaki Ito
PDF
GTFS-JPを活用した総合的な路線時刻表作成の取組
by
Masaki Ito
PDF
サービス化に向けて進化する公共交通と沖縄のポテンシャル
by
Masaki Ito
PDF
MaaSを捉えなおそう・熊本の交通を見直そう
by
Masaki Ito
PDF
データビジュアライゼーションをきっかけに沖縄の交通の「次の一手」を考えよう
by
Masaki Ito
PDF
公共交通オープンデータ第2幕:「静的データは出来た、次はリアルタイム」と決めつける前に考えること
by
Masaki Ito
PDF
低価格で高品質な苺をふんだんに使用したGTFS-RTを整備してみた話
by
Masaki Ito
PDF
バス会社からのデータ提供がオープンデータにたどり着くまで
by
Masaki Ito
PDF
複数のGTFSを用いた時刻表アプリ
by
Masaki Ito
PDF
ジョルダン「乗換案内」での鉄道・バスのリアルタイム情報活用の取り組み
by
Masaki Ito
PDF
ミャンマー国ヤンゴンにおける公共交通オープンデータ開発の取組事例
by
Masaki Ito
PDF
公共交通のオープンデータ化とICT企業としての役割
by
Masaki Ito
PDF
公共交通データを可視化するQGIS演習
by
Masaki Ito
PDF
5社のGTFSをマージして、PostgreSQLにインポートしてみた
by
Masaki Ito
PDF
わたしの考える未来の交通事業
by
Masaki Ito
PDF
行政サービスにデータ資産を活かす: 公共交通データから考える行政の現場でのデータ活用のありかた
by
Masaki Ito
PDF
What i think about when i conduct research in the society
by
Masaki Ito
PDF
日本バス情報協会の活動について
by
Masaki Ito
IT・データが導く新しい地域公共交通の姿を考える
by
Masaki Ito
GTFSデータ整備から始める公共交通の未来像
by
Masaki Ito
公共交通オープンデータの現状と可能性 社会がデータを使いこなすために何をなすべきか
by
Masaki Ito
GTFS-JPを活用した総合的な路線時刻表作成の取組
by
Masaki Ito
サービス化に向けて進化する公共交通と沖縄のポテンシャル
by
Masaki Ito
MaaSを捉えなおそう・熊本の交通を見直そう
by
Masaki Ito
データビジュアライゼーションをきっかけに沖縄の交通の「次の一手」を考えよう
by
Masaki Ito
公共交通オープンデータ第2幕:「静的データは出来た、次はリアルタイム」と決めつける前に考えること
by
Masaki Ito
低価格で高品質な苺をふんだんに使用したGTFS-RTを整備してみた話
by
Masaki Ito
バス会社からのデータ提供がオープンデータにたどり着くまで
by
Masaki Ito
複数のGTFSを用いた時刻表アプリ
by
Masaki Ito
ジョルダン「乗換案内」での鉄道・バスのリアルタイム情報活用の取り組み
by
Masaki Ito
ミャンマー国ヤンゴンにおける公共交通オープンデータ開発の取組事例
by
Masaki Ito
公共交通のオープンデータ化とICT企業としての役割
by
Masaki Ito
公共交通データを可視化するQGIS演習
by
Masaki Ito
5社のGTFSをマージして、PostgreSQLにインポートしてみた
by
Masaki Ito
わたしの考える未来の交通事業
by
Masaki Ito
行政サービスにデータ資産を活かす: 公共交通データから考える行政の現場でのデータ活用のありかた
by
Masaki Ito
What i think about when i conduct research in the society
by
Masaki Ito
日本バス情報協会の活動について
by
Masaki Ito
西日本豪雨で止まった「広島の公共交通情報提供」のその後
1.
⻄⽇本豪⾬で⽌まった 「広島の公共交通情報提供」の その後 神⽥ 佑亮 呉⼯業⾼等専⾨学校 y-kanda@kure-nct.ac.jp Kanda-Lab, National
Institute of Technology, Kure College 1
2.
国土交通省中国地方整備局 山陽自動車道 平成30年7月14日(土) 復旧
東広島・呉自動車道 平成30年7月10(火) 復旧 国道2号 平成30年7月21日(土) 復旧 国道31号 平成30年7月11日(水) 復旧 平成30年7⽉豪⾬ 道路の被災状況 Kanda-Lab, National Institute of Technology, Kure College 2
3.
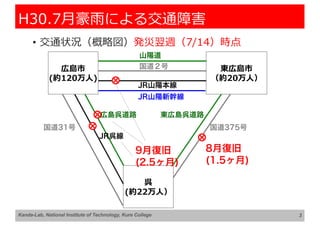
3 H30.7⽉豪⾬による交通障害 • 交通状況(概略図)発災翌週(7/14)時点 広島市 (約120万⼈) 呉 (約22万⼈) 東広島市 (約20万⼈) 山陽道 東広島呉道路 広島呉道路 国道2号 国道31号 国道375号 JR呉線 JR山陽本線 JR山陽新幹線 9月復旧 (2.5ヶ月) 8月復旧 (1.5ヶ月) Kanda-Lab,
National Institute of Technology, Kure College
4.
• 「使える道路空間」を柔軟に活⽤し,バス専⽤の⾛⾏空間を確保 • 所要時間が短縮し安定.便数増加,利⽤者増,渋滞緩和の好循環に (発災直後︓2-3時間→約1時間) 4 災害時BRT(Bus
Rapid Transit) ■通⾏⽌状況と交通渋滞 (7/13(⾦)発災1週間後) 広島 呉 広島呉道路 坂北〜呉 通⾏⽌ 国道31号 ほぼ全線で渋滞 呉線 運休 ■災害時BRTの構成︓渋滞を悪化させずバスの速達性を確保 広島バスセンター 呉駅 広島呉道路 仁保IC 坂北IC 坂南IC 天応⻄IC 天応東IC 呉IC 通⾏⽌区間 をバス⾛⾏ (7/17-) 本線でUターンし, 逆向きのハーフICを 通⾏ ⾃専道に バス専⽤⾞線 (7/26-) 規制で使われて いない⾞線を転⽤ 国道31号 バス専⽤レーン (8/8-) 時間限定で バスレーンを設置 Kanda-Lab, National Institute of Technology, Kure College
5.
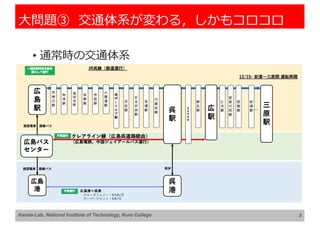
⼤問題③ 交通体系が変わる,しかもコロコロ 5 Kanda-Lab, National
Institute of Technology, Kure College • 通常時の交通体系
6.
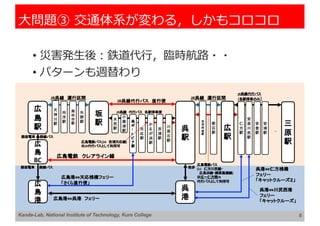
⼤問題③ 交通体系が変わる,しかもコロコロ 6 Kanda-Lab, National
Institute of Technology, Kure College • 災害発⽣後︓鉄道代⾏,臨時航路・・ • パターンも週替わり I JR JR JR JR (34 ) JR BC ⇔ JR … (11 ) JR ⇔ ⇔ ⇔
7.
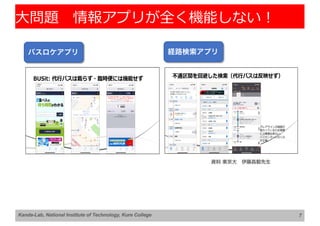
7 ⼤問題 情報アプリが全く機能しない︕ 資料 東京大
伊藤昌毅先生 バスロケアプリ 経路検索アプリ Kanda-Lab, National Institute of Technology, Kure College
8.
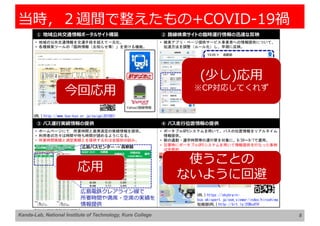
8 当時,2週間で整えたもの+COVID-19禍 Kanda-Lab, National Institute
of Technology, Kure College 今回応⽤ 応⽤ (少し)応⽤ ※CP対応してくれず 使うことの ないように回避
9.
広島地区の「その後」 9 Kanda-Lab, National Institute
of Technology, Kure College
10.
バスデータのGTFS化 • 広島県︓GTFSの導⼊を推進(⻄⽇本豪⾬) • 事業者単位で導⼊ •
江⽥島バス,芸陽バス • 既存バスロケ(BUSit)データのGTFS変換 10 Kanda-Lab, National Institute of Technology, Kure College
11.
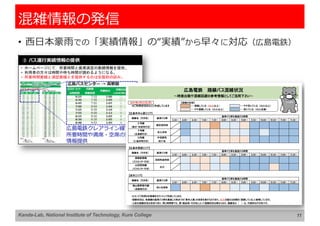
混雑情報の発信 • ⻄⽇本豪⾬での「実績情報」の“実績”から早々に対応(広島電鉄) 11 Kanda-Lab, National
Institute of Technology, Kure College
12.
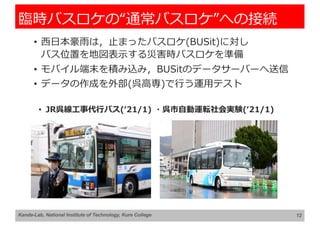
臨時バスロケの“通常バスロケ”への接続 • ⻄⽇本豪⾬は,⽌まったバスロケ(BUSit)に対し バス位置を地図表⽰する災害時バスロケを準備 • モバイル端末を積み込み,BUSitのデータサーバーへ送信 •
データの作成を外部(呉⾼専)で⾏う運⽤テスト 12 Kanda-Lab, National Institute of Technology, Kure College • JR呉線⼯事代⾏バス(ʻ21/1) ・呉市⾃動運転社会実験(ʻ21/1)
13.
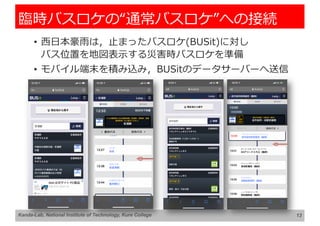
臨時バスロケの“通常バスロケ”への接続 • ⻄⽇本豪⾬は,⽌まったバスロケ(BUSit)に対し バス位置を地図表⽰する災害時バスロケを準備 • モバイル端末を積み込み,BUSitのデータサーバーへ送信 13 Kanda-Lab,
National Institute of Technology, Kure College
14.
フットワークの軽い(AI)オンデマンド交通+GTFS Flex • AIオンデマンド交通の導⼊実験 •
庄原MaaS(2019-)&広電五⽇市地区(2020-) • MaaSの⽂脈+いざというときのモビリティ 14 Kanda-Lab, National Institute of Technology, Kure College • GTFS Flexなどの オープンデータ化 も意識
15.
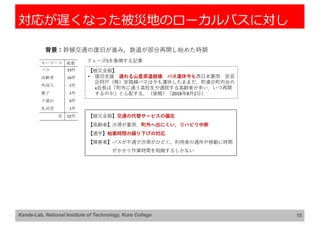
対応が遅くなった被災地のローカルバスに対し 15 Kanda-Lab, National Institute
of Technology, Kure College 背景:幹線交通の復旧が進み,鉄道が部分再開し始めた時期 【被災全般】交通の代替サービスの偏在 【⾼齢者】渋滞が重荷.町外へ出にくい.リハビリ中断 【通学】始業時間の繰り下げの対応 【障害者】バスが不通で渋滞がひどく,利⽤者の通所や移動に時間 がかかり作業時間を短縮するしかない キーワード 総数 バス 33件 高齢者 16件 外国人 1件 親子 1件 子連れ 0件 乳幼児 1件 計 52件 【被災全般】 • 復旧⽀援 遅れる⼭⾥県道崩壊 バス運休今も⻄⽇本豪⾬ 安芸 区阿⼾(略)安路線バスは今も運休したままだ.町連合町内会の x会⻑は「町外に通う⾼校⽣や通院する⾼齢者が多い.いつ再開 するのか」と⼼配する.(後略)(2018年8⽉2⽇) フェーズ5を象徴する記事
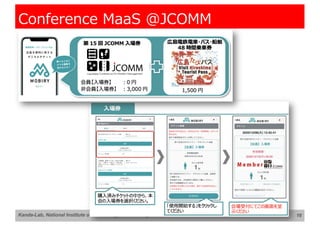
16.
Conference MaaS @JCOMM 16 Kanda-Lab,
National Institute of Technology, Kure College
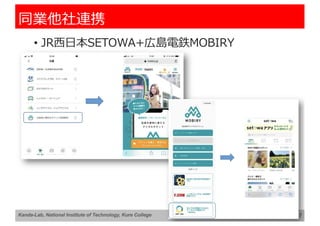
17.
同業他社連携 • JR⻄⽇本SETOWA+広島電鉄MOBIRY 17 Kanda-Lab, National
Institute of Technology, Kure College
18.
⾏き着くところの1つのイメージ • Multi modes
の検索は,1つで完結 • 平常時よりも,むしろ,⾮⽇常(⾮常時・観光等)で活きる︖ 18 Kanda-Lab, National Institute of Technology, Kure College ⽇常(平常時)は⼈々の動きそのものがある程度パターン化しており, 実はダイヤと経路の検索程度︖ 遅れの認識は,オープンになっているテキストデータ(twitter etc) なのかも. ※オープデータを否定しているわけではありません.
19.
今後の展望 • GTFSについては,バスロケが早くできすぎたが ために苦労 • ただし,情報提供・データフォーマットも含め, 「よりよい」モビリティのための議論と実践は 進⾏中 •
⼈的プラットフォームの形成と維持・強化も 進⾏中 • 今後,GTFS含め,様々なデータをどう活かすの かといった検討が必要 19 Kanda-Lab, National Institute of Technology, Kure College
Download