Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
pcl-lab
263 views
分布類似度に基づく健全性指標と風車異常検知システムの早期運用における効果
事前知識を利用することで,監視対象風車のみのデータだけで異常検知を早期運用する手法の検証を行った.
Technology
◦
Read more
0
Save
Share
Embed
Embed presentation
1
/ 30
2
/ 30
3
/ 30
4
/ 30
5
/ 30
6
/ 30
7
/ 30
8
/ 30
9
/ 30
10
/ 30
11
/ 30
12
/ 30
13
/ 30
14
/ 30
15
/ 30
16
/ 30
17
/ 30
18
/ 30
19
/ 30
20
/ 30
21
/ 30
22
/ 30
23
/ 30
24
/ 30
25
/ 30
26
/ 30
27
/ 30
28
/ 30
29
/ 30
30
/ 30
More Related Content
PDF
あらゆる風車に適用可能な状態監視技術を目指して~風車主要機器におけるデータ駆動型異常検知とその評価~
by
pcl-lab
PDF
深層生成モデルと世界モデル
by
Masahiro Suzuki
PDF
MLaPP 4章 「ガウシアンモデル」
by
Shinichi Tamura
PDF
学部生向けベイズ統計イントロ(公開版)
by
考司 小杉
PDF
パターン認識第9章 学習ベクトル量子化
by
Miyoshi Yuya
PDF
深層生成モデルと世界モデル(2020/11/20版)
by
Masahiro Suzuki
PDF
Visualizing Data Using t-SNE
by
Tomoki Hayashi
PPTX
Generative Adversarial Imitation Learningの紹介(RLアーキテクチャ勉強会)
by
Yusuke Nakata
あらゆる風車に適用可能な状態監視技術を目指して~風車主要機器におけるデータ駆動型異常検知とその評価~
by
pcl-lab
深層生成モデルと世界モデル
by
Masahiro Suzuki
MLaPP 4章 「ガウシアンモデル」
by
Shinichi Tamura
学部生向けベイズ統計イントロ(公開版)
by
考司 小杉
パターン認識第9章 学習ベクトル量子化
by
Miyoshi Yuya
深層生成モデルと世界モデル(2020/11/20版)
by
Masahiro Suzuki
Visualizing Data Using t-SNE
by
Tomoki Hayashi
Generative Adversarial Imitation Learningの紹介(RLアーキテクチャ勉強会)
by
Yusuke Nakata
What's hot
ZIP
今さら聞けないカーネル法とサポートベクターマシン
by
Shinya Shimizu
PDF
coordinate descent 法について
by
京都大学大学院情報学研究科数理工学専攻
PPTX
劣モジュラ最適化と機械学習 2.4節
by
Hakky St
PDF
ConvNetの歴史とResNet亜種、ベストプラクティス
by
Yusuke Uchida
PDF
機械学習の理論と実践
by
Preferred Networks
PDF
Skip Connection まとめ(Neural Network)
by
Yamato OKAMOTO
PPTX
ベイズ統計学の概論的紹介
by
Naoki Hayashi
PDF
計算論的学習理論入門 -PAC学習とかVC次元とか-
by
sleepy_yoshi
PDF
pymcとpystanでベイズ推定してみた話
by
Classi.corp
PDF
EMアルゴリズム
by
Sotetsu KOYAMADA(小山田創哲)
PDF
PRML上巻勉強会 at 東京大学 資料 第1章前半
by
Ohsawa Goodfellow
PPTX
[DL輪読会]相互情報量最大化による表現学習
by
Deep Learning JP
PDF
金融×AIで解くべき問題は何か?
by
Tsunehiko Nagayama
PDF
DARM勉強会第3回 (missing data analysis)
by
Masaru Tokuoka
PDF
Rubinの論文(の行間)を読んでみる-傾向スコアの理論-
by
Koichiro Gibo
PDF
Prml6
by
Arata Honda
PDF
ベルヌーイ分布からベータ分布までを関係づける
by
itoyan110
PPTX
パターン認識と機械学習(PRML)第2章 確率分布 2.3 ガウス分布
by
Nagayoshi Yamashita
PPTX
ベイズ深層学習5章 ニューラルネットワークのベイズ推論 Bayesian deep learning
by
ssuserca2822
PDF
【論文紹介】 Attention Based Spatial-Temporal Graph Convolutional Networks for Traf...
by
ddnpaa
今さら聞けないカーネル法とサポートベクターマシン
by
Shinya Shimizu
coordinate descent 法について
by
京都大学大学院情報学研究科数理工学専攻
劣モジュラ最適化と機械学習 2.4節
by
Hakky St
ConvNetの歴史とResNet亜種、ベストプラクティス
by
Yusuke Uchida
機械学習の理論と実践
by
Preferred Networks
Skip Connection まとめ(Neural Network)
by
Yamato OKAMOTO
ベイズ統計学の概論的紹介
by
Naoki Hayashi
計算論的学習理論入門 -PAC学習とかVC次元とか-
by
sleepy_yoshi
pymcとpystanでベイズ推定してみた話
by
Classi.corp
EMアルゴリズム
by
Sotetsu KOYAMADA(小山田創哲)
PRML上巻勉強会 at 東京大学 資料 第1章前半
by
Ohsawa Goodfellow
[DL輪読会]相互情報量最大化による表現学習
by
Deep Learning JP
金融×AIで解くべき問題は何か?
by
Tsunehiko Nagayama
DARM勉強会第3回 (missing data analysis)
by
Masaru Tokuoka
Rubinの論文(の行間)を読んでみる-傾向スコアの理論-
by
Koichiro Gibo
Prml6
by
Arata Honda
ベルヌーイ分布からベータ分布までを関係づける
by
itoyan110
パターン認識と機械学習(PRML)第2章 確率分布 2.3 ガウス分布
by
Nagayoshi Yamashita
ベイズ深層学習5章 ニューラルネットワークのベイズ推論 Bayesian deep learning
by
ssuserca2822
【論文紹介】 Attention Based Spatial-Temporal Graph Convolutional Networks for Traf...
by
ddnpaa
Similar to 分布類似度に基づく健全性指標と風車異常検知システムの早期運用における効果
PDF
時系列分析による異常検知入門
by
Yohei Sato
PDF
距離学習を導入した二値分類モデルによる異常音検知
by
NU_I_TODALAB
PDF
Towards Total Recall in Industrial Anomaly Detection
by
harmonylab
PDF
正常稼働状態の表現学習に基づく風車異常検知
by
pcl-lab
PDF
FIT2012招待講演「異常検知技術のビジネス応用最前線」
by
Shohei Hido
PDF
Anomaly detection survey
by
ぱんいち すみもと
PPTX
異常検知と変化検知の1~3章をまとめてみた
by
Takahiro Yoshizawa
PDF
AIOpsで実現する効率化 OSC 2022 Online Spring TIS
by
Daisuke Ikeda
PPTX
Spatial Temporal Graph Convolutional Networks for Skeleton-Based Action Recog...
by
yukihiro domae
PDF
『機械学習による故障予測・異常検知 事例紹介とデータ分析プロジェクト推進ポイント』
by
The Japan DataScientist Society
PPTX
RAPiD
by
harmonylab
PPTX
Feature Erasing and Diffusion Network for Occluded Person Re-Identification
by
harmonylab
PDF
量子アニーリングを用いたクラスタ分析 (QIT32)
by
Shu Tanaka
PDF
正常・損傷の表現学習に基づく風力発電システム異常検知技術の高度化
by
pcl-lab
PDF
bigdata2012ml okanohara
by
Preferred Networks
PDF
データマイニング勉強会3
by
Yohei Sato
PDF
数理情報学特別講義ⅰ輪講
by
Shengbo Xu
PDF
CVPR 2019 report (30 papers)
by
ShunsukeNakamura17
PDF
SOINN-AM
by
SOINN Inc.
PDF
2007 IEEE ICDM DMC task1 result
by
Taiga Nomi
時系列分析による異常検知入門
by
Yohei Sato
距離学習を導入した二値分類モデルによる異常音検知
by
NU_I_TODALAB
Towards Total Recall in Industrial Anomaly Detection
by
harmonylab
正常稼働状態の表現学習に基づく風車異常検知
by
pcl-lab
FIT2012招待講演「異常検知技術のビジネス応用最前線」
by
Shohei Hido
Anomaly detection survey
by
ぱんいち すみもと
異常検知と変化検知の1~3章をまとめてみた
by
Takahiro Yoshizawa
AIOpsで実現する効率化 OSC 2022 Online Spring TIS
by
Daisuke Ikeda
Spatial Temporal Graph Convolutional Networks for Skeleton-Based Action Recog...
by
yukihiro domae
『機械学習による故障予測・異常検知 事例紹介とデータ分析プロジェクト推進ポイント』
by
The Japan DataScientist Society
RAPiD
by
harmonylab
Feature Erasing and Diffusion Network for Occluded Person Re-Identification
by
harmonylab
量子アニーリングを用いたクラスタ分析 (QIT32)
by
Shu Tanaka
正常・損傷の表現学習に基づく風力発電システム異常検知技術の高度化
by
pcl-lab
bigdata2012ml okanohara
by
Preferred Networks
データマイニング勉強会3
by
Yohei Sato
数理情報学特別講義ⅰ輪講
by
Shengbo Xu
CVPR 2019 report (30 papers)
by
ShunsukeNakamura17
SOINN-AM
by
SOINN Inc.
2007 IEEE ICDM DMC task1 result
by
Taiga Nomi
More from pcl-lab
PDF
定置網漁における漁獲過程モデルを用いたシロサケの日単位漁獲量予測
by
pcl-lab
PDF
畳み込みニューラルネットワークに基づく風車異常検知システムにおける判断根拠の可視化に関する検討
by
pcl-lab
PDF
Tandem connectionist anomaly detection: Use of faulty vibration signals in fe...
by
pcl-lab
PDF
Adaptive training of vibration-based anomaly detector for wind turbine condit...
by
pcl-lab
PDF
映像情報を用いた分娩時の牛の状態推定
by
pcl-lab
PDF
映像情報による肉牛の分娩検知システムにおけるクラウドソーシングを用いた誤検出抑制
by
pcl-lab
PDF
画像情報による黒毛和牛種の状態識別に基づいた分娩予兆検知システム
by
pcl-lab
PDF
画像情報を用いた黒毛和牛種の乗駕行動の検知に関する検討
by
pcl-lab
PDF
漁獲量における心理尺度と漁獲量予測器の最適化への利用
by
pcl-lab
PDF
Bilinear map of filter-bank outputs for DNN-based speech recognition
by
pcl-lab
定置網漁における漁獲過程モデルを用いたシロサケの日単位漁獲量予測
by
pcl-lab
畳み込みニューラルネットワークに基づく風車異常検知システムにおける判断根拠の可視化に関する検討
by
pcl-lab
Tandem connectionist anomaly detection: Use of faulty vibration signals in fe...
by
pcl-lab
Adaptive training of vibration-based anomaly detector for wind turbine condit...
by
pcl-lab
映像情報を用いた分娩時の牛の状態推定
by
pcl-lab
映像情報による肉牛の分娩検知システムにおけるクラウドソーシングを用いた誤検出抑制
by
pcl-lab
画像情報による黒毛和牛種の状態識別に基づいた分娩予兆検知システム
by
pcl-lab
画像情報を用いた黒毛和牛種の乗駕行動の検知に関する検討
by
pcl-lab
漁獲量における心理尺度と漁獲量予測器の最適化への利用
by
pcl-lab
Bilinear map of filter-bank outputs for DNN-based speech recognition
by
pcl-lab
Recently uploaded
PDF
第21回 Gen AI 勉強会「NotebookLMで60ページ超の スライドを作成してみた」
by
嶋 是一 (Yoshikazu SHIMA)
PDF
100年後の知財業界-生成AIスライドアドリブプレゼン イーパテントYouTube配信
by
e-Patent Co., Ltd.
PDF
Starlink Direct-to-Cell (D2C) 技術の概要と将来の展望
by
CRI Japan, Inc.
PDF
Reiwa 7 IT Strategist Afternoon I Question-1 3C Analysis
by
akipii ogaoga
PDF
Reiwa 7 IT Strategist Afternoon I Question-1 Ansoff's Growth Vector
by
akipii ogaoga
PDF
2025→2026宙畑ゆく年くる年レポート_100社を超える企業アンケート総まとめ!!_企業まとめ_1229_3版
by
sorabatake
PDF
さくらインターネットの今 法林リージョン:さくらのAIとか GPUとかイベントとか 〜2026年もバク進します!〜
by
法林浩之
PPTX
ddevについて .
by
iPride Co., Ltd.
PDF
Drupal Recipes 解説 .
by
iPride Co., Ltd.
第21回 Gen AI 勉強会「NotebookLMで60ページ超の スライドを作成してみた」
by
嶋 是一 (Yoshikazu SHIMA)
100年後の知財業界-生成AIスライドアドリブプレゼン イーパテントYouTube配信
by
e-Patent Co., Ltd.
Starlink Direct-to-Cell (D2C) 技術の概要と将来の展望
by
CRI Japan, Inc.
Reiwa 7 IT Strategist Afternoon I Question-1 3C Analysis
by
akipii ogaoga
Reiwa 7 IT Strategist Afternoon I Question-1 Ansoff's Growth Vector
by
akipii ogaoga
2025→2026宙畑ゆく年くる年レポート_100社を超える企業アンケート総まとめ!!_企業まとめ_1229_3版
by
sorabatake
さくらインターネットの今 法林リージョン:さくらのAIとか GPUとかイベントとか 〜2026年もバク進します!〜
by
法林浩之
ddevについて .
by
iPride Co., Ltd.
Drupal Recipes 解説 .
by
iPride Co., Ltd.
分布類似度に基づく健全性指標と風車異常検知システムの早期運用における効果
1.
分布類似度に基づく健全性指標と 風車異常検知システムの早期運用における効果 本研究は,NEDO事業「⾵⾞運⽤⾼度化技術研究開発」による⽀援を受けた. 緒⽅ 淳 ⼩川 哲司 ⻑⾕川
隆徳 飯⽥ 誠
2.
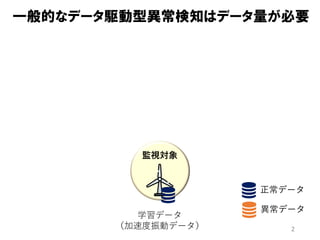
2 一般的なデータ駆動型異常検知はデータ量が必要 監視対象 学習データ (加速度振動データ) 正常データ 異常データ
3.
3 データ駆動型異常検知の早期運用にむけて 監視対象外の類似機器 監視対象 学習データ (加速度振動データ) 正常データ 異常データ
4.
4 類似機器の正常・異常データを活用[Hasegawa+17] 監視対象外の類似機器 監視対象 学習データ (加速度振動データ) 正常データ 異常データ
5.
5 類似機器の正常データを活用[Hasegawa+18] 監視対象外の類似機器 監視対象 学習データ (加速度振動データ) 正常データ 異常データ
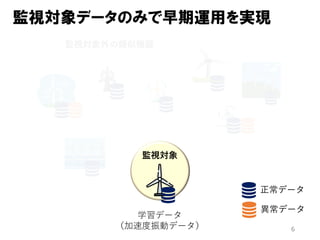
6.
6 監視対象データのみで早期運用を実現 監視対象外の類似機器 監視対象 学習データ (加速度振動データ) 正常データ 異常データ
7.
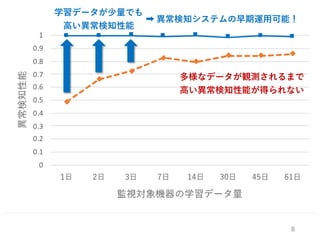
7 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1⽇ 2⽇ 3⽇
7⽇ 14⽇ 30⽇ 45⽇ 61⽇ 異常検知性能 監視対象機器の学習データ量 多様なデータが観測されるまで ⾼い異常検知性能が得られない
8.
8 学習データが少量でも ⾼い異常検知性能 多様なデータが観測されるまで ⾼い異常検知性能が得られない ➡ 異常検知システムの早期運⽤可能!
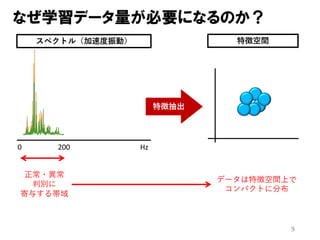
9.
9 なぜ学習データ量が必要になるのか? Hz 正常・異常 判別に 寄与する帯域 データは特徴空間上で コンパクトに分布 0 200 特徴抽出 スペクトル(加速度振動) 特徴空間
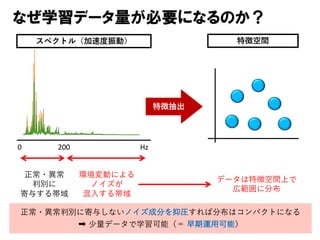
10.
10 なぜ学習データ量が必要になるのか? Hz 正常・異常 判別に 寄与する帯域 データは特徴空間上で 広範囲に分布 0 200 特徴抽出 特徴空間 環境変動による ノイズが 混⼊する帯域 正常・異常判別に寄与しないノイズ成分を抑圧すれば分布はコンパクトになる ➡ 少量データで学習可能(=
早期運⽤可能) スペクトル(加速度振動)
11.
11 知識を使ってノイズを抑圧する Hz 正常・異常 判別に 寄与する帯域 データは特徴空間上で コンパクトに分布 0 200 特徴抽出 特徴空間 この機器は 0〜200Hz を⾒れば良い 監視機器の損傷周波数等の知識を 使ってノイズ成分を事前に抑圧 スペクトル(加速度振動)
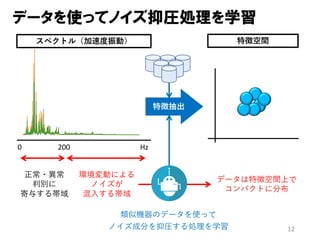
12.
12 データを使ってノイズ抑圧処理を学習 Hz 正常・異常 判別に 寄与する帯域 データは特徴空間上で コンパクトに分布 0 200 特徴抽出 特徴空間 環境変動による ノイズが 混⼊する帯域 類似機器のデータを使って ノイズ成分を抑圧する処理を学習 スペクトル(加速度振動)
13.
13 データと知識のトレードオフ関係 特徴抽出に⽤いる知識 監視対象 (正常) +類似機器 (正常) +類似機器 (正常・異常) 不要 必要 特徴抽出過程を 学習するデータ 監視対象 (正常) 照合器
14.
14 データから特徴抽出過程を学習した例 AE/GMM [Hasegawa+18] DNN/GMM [Hasegawa+17] 特徴抽出に⽤いる知識 監視対象 (正常) +類似機器 (正常) +類似機器 (正常・異常) 不要 必要 特徴抽出過程を 学習するデータ 監視対象 (正常) 照合器
15.
15 監視対象のデータのみで早期運用するには? ? ? 特徴抽出に⽤いる知識 監視対象 (正常) +類似機器 (正常) +類似機器 (正常・異常) 不要 必要 特徴抽出過程を 学習するデータ 監視対象 (正常) 照合器
16.
アプローチ 16
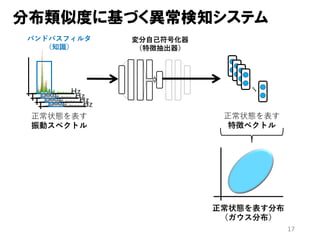
17.
17 分布類似度に基づく異常検知システム Hz Hz Hz Hz 正常状態を表す分布 (ガウス分布) 64ユニット !ユニット 64 ユニット 32ユニット 32ユニット 64ユニット 64ユニット !ユニット!ユニット … 正常状態を表す 振動スペクトル 正常状態を表す 特徴ベクトル 変分⾃⼰符号化器 (特徴抽出器) バンドパスフィルタ (知識)
18.
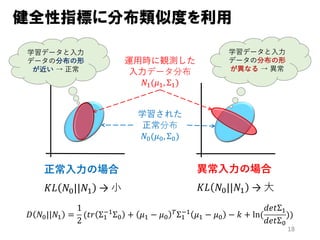
18 健全性指標に分布類似度を利用 運⽤時に観測した ⼊⼒データ分布 𝑁!(𝜇!, Σ!) 学習データと⼊⼒ データの分布の形 が異なる →
異常 学習データと⼊⼒ データの分布の形 が近い → 正常 正常⼊⼒の場合 𝐾𝐿 𝑁!||𝑁" → ⼩ 異常⼊⼒の場合 𝐾𝐿 𝑁!||𝑁" → ⼤ 学習された 正常分布 𝑁"(𝜇", Σ") 𝐷 𝑁"||𝑁! = 1 2 (𝑡𝑟 Σ! #! Σ" + 𝜇! − 𝜇" $Σ! #! 𝜇! − 𝜇" − 𝑘 + ln( 𝑑𝑒𝑡Σ! 𝑑𝑒𝑡Σ" ))
19.
異常検知実験 19
20.
20 検証内容 実験 1 監視対象機器データのみで異常検知を 早期運⽤するには知識は必要か? 実験 2 データと知識の関係
21.
風車主要機器の振動データ 項⽬ ⾵⾞A 対象機器 主軸受(19rpm) ラベル
正常 損傷 損傷モード 軌道⾯の剥離損傷 計測⽅法 2時間おきに40秒間 FFT窓幅 5.12秒 制限帯域 0 ‒ 200Hz 21 l NEDOスマートメンテナンスPJで収集された実機データ l 主軸受の⼨法等のスペックは未知
22.
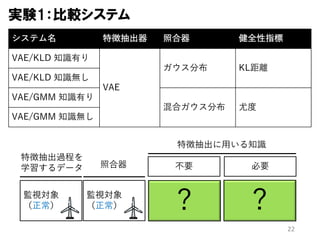
22 実験1:比較システム システム名 特徴抽出器 照合器
健全性指標 VAE/KLD 知識有り VAE ガウス分布 KL距離 VAE/KLD 知識無し VAE/GMM 知識有り 混合ガウス分布 尤度 VAE/GMM 知識無し ? ? 特徴抽出に⽤いる知識 監視対象 (正常) 不要 必要 特徴抽出過程を 学習するデータ 照合器 監視対象 (正常)
23.
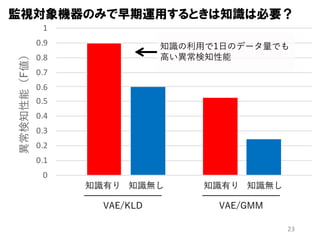
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 異常検知性能(F値) 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 異常検知性能(F値) 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1異常検知性能(F値) 23 監視対象機器のみで早期運用するときは知識は必要? 知識有り 知識無し VAE/KLD VAE/GMM 知識有り
知識無し 知識の利⽤で1⽇のデータ量でも ⾼い異常検知性能
24.
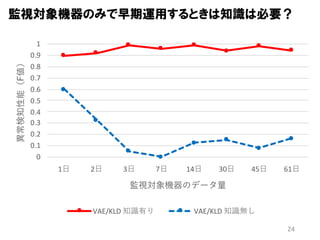
24 監視対象機器のみで早期運用するときは知識は必要? 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1⽇ 2⽇ 3⽇
7⽇ 14⽇ 30⽇ 45⽇ 61⽇ 異常検知性能(F値) 監視対象機器のデータ量 VAE/KLD 知識有り VAE/KLD 知識無し
25.
25 実験2:データと知識の関係 AE/GMM [Hasegawa+18] DNN/GMM [Hasegawa+17] 特徴抽出に⽤いる知識 監視対象 (正常) +類似機器 (正常) +類似機器 (正常・異常) 不要 必要 特徴抽出過程を 学習するデータ 監視対象 (正常) 照合器 VAE/KLD
26.
0.5 0.6 0.7 0.8 0.9 1 1⽇ 2⽇ 3⽇
7⽇ 14⽇ 30⽇ 45⽇ 61⽇ 異常検知性能(ROC-AUC) 監視対象機器のデータ量 AE/GMM 26 類似機器の正常データがあれば知識不要で早期運用可能
27.
0.5 0.6 0.7 0.8 0.9 1 1⽇ 2⽇ 3⽇
7⽇ 14⽇ 30⽇ 45⽇ 61⽇ 異常検知性能(ROC-AUC) 監視対象機器のデータ量 AE/GMM DNN/GMM 27 類似機器の異常データがあれば知識不要で早期運用可能
28.
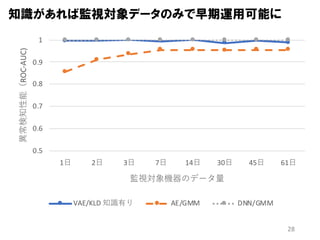
0.5 0.6 0.7 0.8 0.9 1 1⽇ 2⽇ 3⽇
7⽇ 14⽇ 30⽇ 45⽇ 61⽇ 異常検知性能(ROC-AUC) 監視対象機器のデータ量 VAE/KLD 知識有り AE/GMM DNN/GMM 28 知識があれば監視対象データのみで早期運用可能に
29.
テイクホームメッセージ 29 状況に応じて3つの異常検知⼿法を 使い分けることで早期運⽤を実現 監視対象(正常) データのみ利⽤可能 類似機器(正常) データが利⽤可能 類似機器(正常・異常) データが利⽤可能 DNN/GMM [Hasegawa+17] AE/GMM [Hasegawa+18] VAE/KLD +損傷周波数等の知識
30.
Appendix 30


![4
類似機器の正常・異常データを活用[Hasegawa+17]
監視対象外の類似機器
監視対象
学習データ
(加速度振動データ)
正常データ
異常データ](https://image.slidesharecdn.com/202011271251-jwea2020-hasegawa-final-201203041934/85/slide-4-320.jpg)
![5
類似機器の正常データを活用[Hasegawa+18]
監視対象外の類似機器
監視対象
学習データ
(加速度振動データ)
正常データ
異常データ](https://image.slidesharecdn.com/202011271251-jwea2020-hasegawa-final-201203041934/85/slide-5-320.jpg)



![14
データから特徴抽出過程を学習した例
AE/GMM
[Hasegawa+18]
DNN/GMM
[Hasegawa+17]
特徴抽出に⽤いる知識
監視対象
(正常)
+類似機器
(正常)
+類似機器
(正常・異常)
不要 必要
特徴抽出過程を
学習するデータ
監視対象
(正常)
照合器](https://image.slidesharecdn.com/202011271251-jwea2020-hasegawa-final-201203041934/85/slide-14-320.jpg)





![25
実験2:データと知識の関係
AE/GMM
[Hasegawa+18]
DNN/GMM
[Hasegawa+17]
特徴抽出に⽤いる知識
監視対象
(正常)
+類似機器
(正常)
+類似機器
(正常・異常)
不要 必要
特徴抽出過程を
学習するデータ
監視対象
(正常)
照合器
VAE/KLD](https://image.slidesharecdn.com/202011271251-jwea2020-hasegawa-final-201203041934/85/slide-25-320.jpg)


![テイクホームメッセージ
29
状況に応じて3つの異常検知⼿法を
使い分けることで早期運⽤を実現
監視対象(正常)
データのみ利⽤可能
類似機器(正常)
データが利⽤可能
類似機器(正常・異常)
データが利⽤可能
DNN/GMM
[Hasegawa+17]
AE/GMM
[Hasegawa+18]
VAE/KLD
+損傷周波数等の知識](https://image.slidesharecdn.com/202011271251-jwea2020-hasegawa-final-201203041934/85/slide-29-320.jpg)




















![[DL輪読会]相互情報量最大化による表現学習](https://cdn.slidesharecdn.com/ss_thumbnails/20190913iwasawa-190913002312-thumbnail.jpg?width=640&height=640&fit=bounds)