Downloaded 147 times














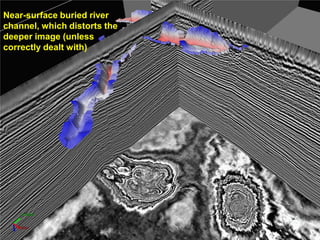



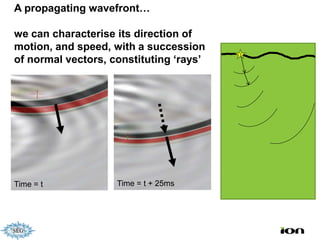















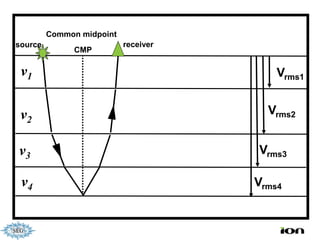


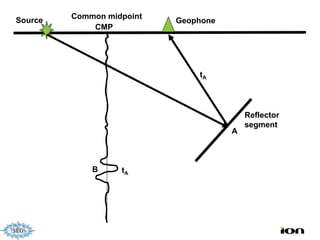






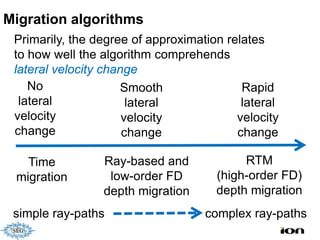




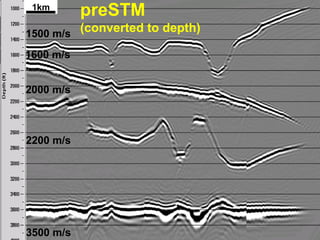























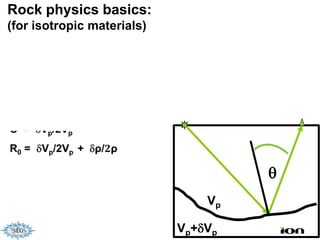
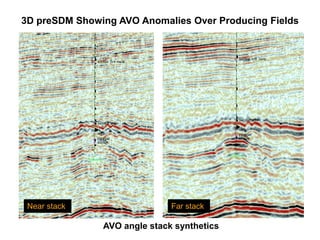



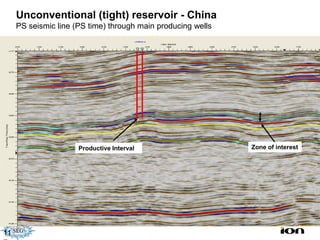










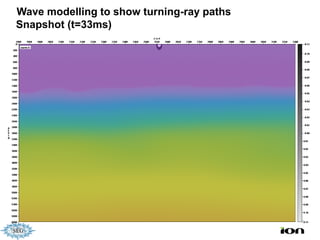





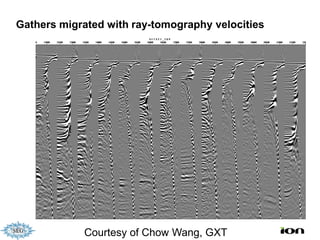
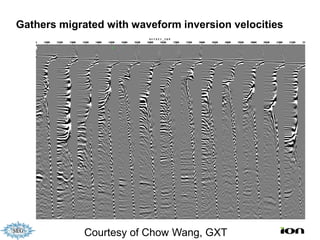


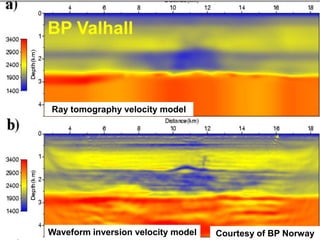

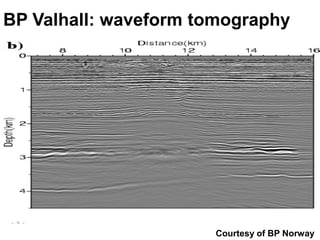
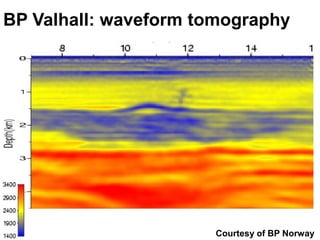
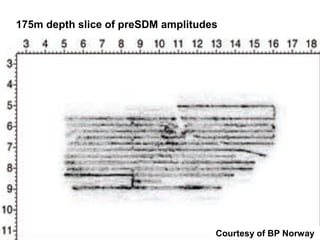






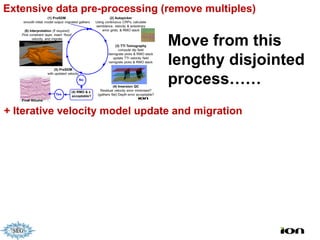

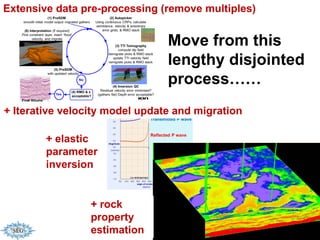

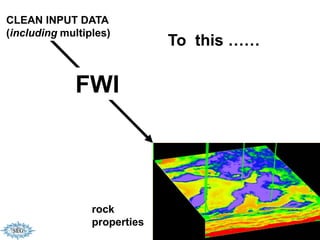



The document discusses the process of hydrocarbon exploration, detailing stages such as data pre-conditioning, velocity model building, migration, and amplitude analysis to locate oil and gas. It explores theoretical concepts, methods, and migration algorithms used in subsurface imaging and presents challenges encountered in seismic data interpretation. The talk emphasizes advancements in strategies like full waveform inversion to enhance accuracy in geological imaging.




















































































