Mengenal Sensor Proximity yang merupakan sensor yang mampu mendeteksi benda tanpa adanya kontak fisik sehingga memudahkan dalam aktivitas tertentu yang memerlukan sensor jenis ini. Sensor ini terbagi menjadi 3, yaitu proximity induktif, proximity kapasitif, dan proximity magnetik.
Tugas Instrumentasi Semester 3
Politeknik Negeri Bandung
Jurusan Teknik Pendingin Dan Tata Udara
Yang diberikan oleh :
Bapak Muhammad Arman
Bapak Eddy Erham
Bapak Ismail Welid
Bapak Nur Khakim
Mengenal Sensor Proximity yang merupakan sensor yang mampu mendeteksi benda tanpa adanya kontak fisik sehingga memudahkan dalam aktivitas tertentu yang memerlukan sensor jenis ini. Sensor ini terbagi menjadi 3, yaitu proximity induktif, proximity kapasitif, dan proximity magnetik.
Tugas Instrumentasi Semester 3
Politeknik Negeri Bandung
Jurusan Teknik Pendingin Dan Tata Udara
Yang diberikan oleh :
Bapak Muhammad Arman
Bapak Eddy Erham
Bapak Ismail Welid
Bapak Nur Khakim
IEEE 2014 PROJECT TITLES FOR ME, M.TECH, BE, B.TECH, (CSE, IT) MSC, MCA PROJ...Irissolution
Iris Solutions is a Leading ISO Certified R&D Company. We Providing Final Year Projects & Courses with Innovative training Methods. All classes Handling By Well Qualified Staffs. Job support for qualified candidates. Projects in Java, J2ee, Vb, C#, .Net, Embedded, VLSI & Matlab. domain Using Networking, Network security, Mobile computing, Image Processing,etc......Eligibility:M.E /M.TECH, MCA, M.Sc(CSE, IT)B.E/ B.TECH (ECE, EEE, E&I, ICE, CSE, IT)DIPLOMA (ECE, E&I, EEE, CSE, IT, ROBOTICS)BCA, B.Sc (CSE, IT)
High protection ATM system with fingerprint identification technologyAlfred Oboi
This project was carried out at the College of Engineering, Design, Art and Technology, Makerere university Kampala Uganda
The main objective of this project was to come up with a more secure ATM system that will reduce on the ATM fraud.
The Six Highest Performing B2B Blog Post FormatsBarry Feldman
If your B2B blogging goals include earning social media shares and backlinks to boost your search rankings, this infographic lists the size best approaches.
Tugas kecerdasan buatan (sistem sensor) agus romadlonlaztorino
Sesuai dengan judul yaitu Robotik dan Sensor maka hal tersebut tidak lepas dengan
yang di sebut dengan kecerdasan buatan. Sesuai dengan namanya atau sering disebut
dengan Artificial Intelegensi (AI), Kecerdasan buatan adalah salah satu cabang sains
komputer yang mempelajari otomatisasi tingkah laku cerdas yang didasarkan pada
prinsip-prinsip teoritikal dan terapan yang menyangkut struktur data yang digunakan
dalam representasi pengetahuan
Sensor Capasitive Construction
Sensor kapasitif merupakan sensor elektronika yang bekerja berdasarkan konsep kapasitif. Sensor ini bekerja berdasarkan perubahan muatan energi listrik yang dapat disimpan oleh sensor akibat perubahan jarak lempeng, perubahan luas penampang dan perubahan volume dielektrikan sensor kapasitif tersebut.
Sensor kapasitif terdiri dari dua komponen utama dua plat sebagai elektrode yaitu sensing elektrode dan referense elektrode.
1. SENSOR
oleh: Aditya Banuaji dan Amy Hadiastuti
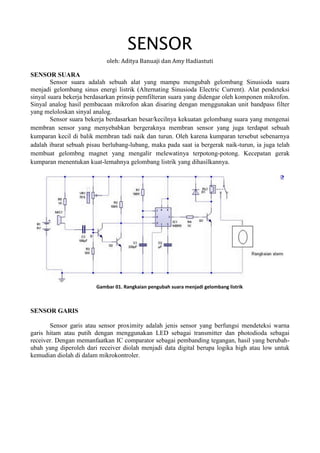
SENSOR SUARA
Sensor suara adalah sebuah alat yang mampu mengubah gelombang Sinusioda suara
menjadi gelombang sinus energi listrik (Alternating Sinusioda Electric Current). Alat pendeteksi
sinyal suara bekerja berdasarkan prinsip pemfilteran suara yang didengar oleh komponen mikrofon.
Sinyal analog hasil pembacaan mikrofon akan disaring dengan menggunakan unit bandpass filter
yang meloloskan sinyal analog.
Sensor suara bekerja berdasarkan besar/kecilnya kekuatan gelombang suara yang mengenai
membran sensor yang menyebabkan bergeraknya membran sensor yang juga terdapat sebuah
kumparan kecil di balik membran tadi naik dan turun. Oleh karena kumparan tersebut sebenarnya
adalah ibarat sebuah pisau berlubang-lubang, maka pada saat ia bergerak naik-turun, ia juga telah
membuat gelombng magnet yang mengalir melewatinya terpotong-potong. Kecepatan gerak
kumparan menentukan kuat-lemahnya gelombang listrik yang dihasilkannya.
Gambar 01. Rangkaian pengubah suara menjadi gelombang listrik
SENSOR GARIS
Sensor garis atau sensor proximity adalah jenis sensor yang berfungsi mendeteksi warna
garis hitam atau putih dengan menggunakan LED sebagai transmitter dan photodioda sebagai
receiver. Dengan memanfaatkan IC comparator sebagai pembanding tegangan, hasil yang berubahubah yang diperoleh dari receiver diolah menjadi data digital berupa logika high atau low untuk
kemudian diolah di dalam mikrokontroler.
2. Gambar 2. Rangkaian sensor garis
Sensor api/panas
Sensor api/panas adalah sensor yang dapat mendeteksi keberadaan api. Pendeteksian yang
dilakukan oleh sensor api/ panas dilakukan melalui beberapa cara, yakni melalui pendeteksian (1)
perubahan suhu, (2) keberadaan sinar UV, (3) keberadaan sinar IR. Berikut ini adalah contohcontoh sensor api/panas berdasarkan cara kerjanya.
1. Sensor Panas Pyroelectric Detektor, Eltec E442-3
Sensor ini adalah sebuah IR-EYE berupa Lithium Tantalate Pyroelectric parallel opposed
dual element high gain detector dengan pemroses sinyal analog terintegrasi. Sensor ini dapat
mendeteksi perubahan panas dari -40 hingga +70 derajat Celcius tanpa perubahan yang siginfikan
dari noise dan sensitivitas.
2. Sensor Cahaya UVtron, Hamamatsu UVtron R66-R2868
Sensor ini peka terhadap radiasi UV antara 185 – 260 nm. Sensor ini digunakan bersama
dengan sebuah driver untuk mendeteksi spektrum UV yang dipancarkan oleh api.
3. Sensor Panas TPA81
Sensor panas TPA81 adalah sebuah thermophile array yang mendeteksi gelombang infra
merah pada kisaran panjang gelombang 2 μm – 22 μm. Daerah kisaran tersebut merupakan
gelombang radiasi panas. Sensor TPA81 dapat mendeteksi perubahan panas pada beberapa posisi
sehingga dapat mendeteksi pergerakan panas. TPA81 terdiri dari delapan thermopile yang disusun.
Sensor ini dapat mendeteksi panas dari delapan titik secara simultan. Sensor ini dapat mendeteksi
panas api dalam jangkauan dua meter dan tidak terpengaruh oleh cahaya. TPA81 dapat diakses
dangan menggunakan komunikasi i2c. Alamat register device TPA81 adalah 0x0D0. Di bawah ini
adalah bentuk fisik sensor TPA81
3. Gambar 03. Eltec E442-3 Pyroelectric Detector.
Gambar 05. Bentuk fisik sensor TPA81.
Gambar 04. Hamamatsu UVtron R66-R2868.
Gambar 06. Bentuk fisik Range Sensor Sharp GP2D12.
Sensor Jarak
Sensor jarak (proximity sensor) merupakan komponen untuk mendeteksi keberadaan suatu
objek beserta perkiraan jaraknya. Sensor jarak adalah perkakas yang tidak bersentuhan dengan
objek yang berfungsi untuk menyediakan peringatan dini mengenai keberadaan objek di depannya.
Uraian di bawah ini adalah penjelasan mengenai dua buah sensor jarak, yaitu (1) sensor jarak infra
merah dan (2) sensor jarak ultrasonik.
1. Sensor Jarak Infra Merah, Sharp GP2D12
Sensor ini termasuk pada sensor jarak kategori optik. Pada dasarnya sensor ini sama seperti
sensor Infra Red (IR) konvensional, GP2D12 memiliki bagian transmitter/emitter dan receiver
(detektor). Bagian transmitter akan memancarkan sinyal IR yang telah dimodulasi, sedangkan
pantulan dari IR (apabila mengenai sebuah objek) akan ditangkap oleh bagian detektor yang terdiri
dari lensa pemfokus dan sebuah position-sensitive detector. Gambar 06 di atas adalah bentuk fisik
dari sensor Sharp GP2D12.
Sensor Sharp GP2D12 dapat mengukur jarak halangan pada daerah 10 – 80 cm dengan
memanfaatkan pemancaran dan penerimaan gelombang infra merah sebagai media untuk
mengestimasi jarak. Penggunaan sperktrum infra merah menyebabkan sensor ini tidak mudah
terganggu dengan keberadaan cahaya tampak dari lingkungan karena memiliki daerah spektrum
yang berbeda.
4. Untuk menghitung jarak objek pada wilayah pandangnya, sensor ini menggunakan metode
triangulation dan sebuah linear CCD array sebagai position-sensitive detector. Pertama-tama,
emitter memancarkan sinyal IR yang telah dimodulasi ke arah target. Sinar ini berjalan sepanjang
sudut pandangnya dan akan dipantulkan oleh objek yang menghalanginya. Jika tidak mengenai
objek, IR tidak akan dipantulkan kembali dan sensor mendeteksi ketidakberadaan objek.
Pantulan IR akan diterima oleh lensa pada detektor dan difokuskan ke linear CCD array.
Detektor akan mendeteksi sudut datang IR hasil pantulan sebagai parameter jarak. Perbedaan sudut
sinar datang yang diterima oleh detektor sinar IR ini kemudian akan diproyeksikan oleh lensa pada
bagian tertentu dari CCD array sesuai sudut datang dari IR. Dengan kata lain, lokasi penerima
cahaya pada CCD array akan merepresentasikan jarak objek. Gambar 07 di bawah ini
mengilustrasikan cara kerja sensor Sharp GP2D12 pada saat mendeteksi objek dekat dan saat
mendeteksi objek jauh
Gambar 07. Ilustrasi cara kerja sensor Sharp GP2D12
2. Sensor Jarak Ultrasonik, R93-SRF05
Sensor Ultrasonik R93-SRF05 (biasa disebut SRF05) merupakan sensor jarak yang mampu
mendeteksi jarak halangan di depannya pada rentang 3 cm – 3 m. Sensor ini menggunakan prinsip
time of flight, artinya sensor tersebut akan mengukur waktu semenjak suara dipancarkan hingga
terdengar suara pantulnya. Waktu yang terukur akan dibandingkan dengan jarak tempuhnya.
Gambar di bawah ini adalah bentuk fisik dari sensor SRF05.
Prinsip kerja sensor ini digambarkan dalam Gambar 09. Pulsa ultrasonik, yang merupakan
sinyal ultrasonik dengan frekuensi ±41 kHz sebanyak 12 periode, dikirimkan dari pemancar
ultrasonik. Ketika pulsa mengenai benda penghalang, pulsa ini dipantulkan, dan diterima kembali
oleh penerima ultrasonik. Dengan mengukur selang waktu antara saat pulsa dikirim dan pulsa
pantul diterima. Jarak antara alat pengukur dan benda penghalang bisa dihitung
5. Gambar 08. Bentuk fisik Range Sensor SRF05
Gambar 09. Prinsip kerja sensor jarak ultrasonik