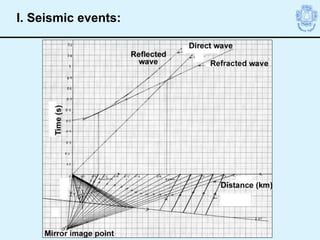
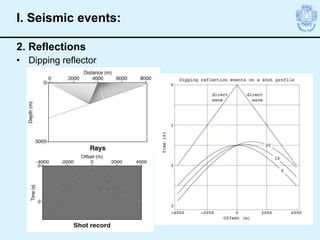
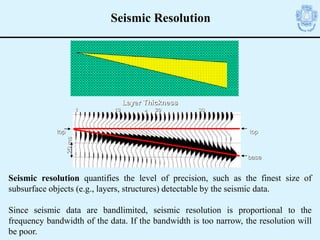
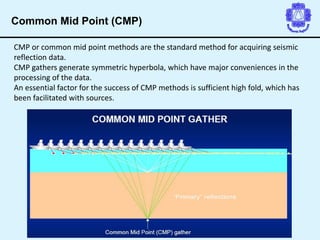
The document provides an extensive overview of seismic methods used in hydrocarbon exploration. It discusses the principles of seismic data acquisition, processing, and interpretation, focusing on how seismic waves are used to image subsurface structures and the importance of resolution and noise reduction in data processing. Key concepts include seismic theory, vertical and lateral resolution, and the steps involved in transforming raw data into usable geological insights.













































































































































![Human Reproduction [ Reproductive System ] Notes @irfanullah_mehar Irfanullah...](https://cdn.slidesharecdn.com/ss_thumbnails/humanreproductionreproductivesystemnotesirfanullahmeharirfanullahmeharjanantantra-260111172350-56e85778-thumbnail.jpg?width=640&height=640&fit=bounds)


















