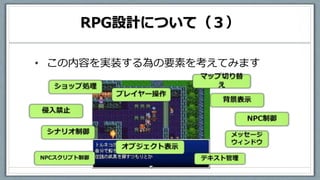
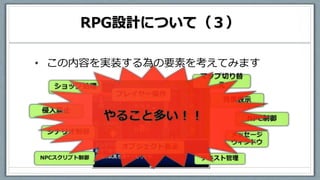
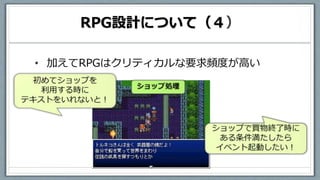
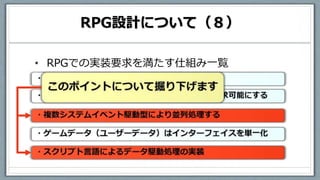
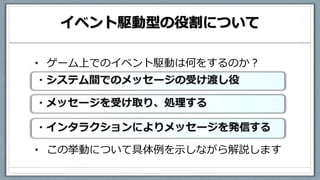
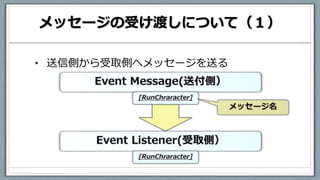
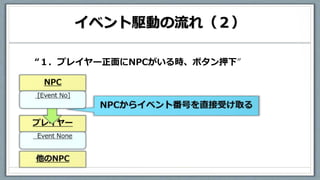
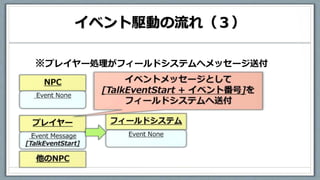
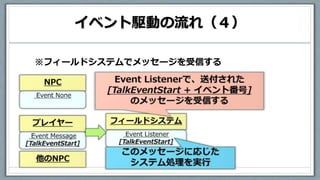
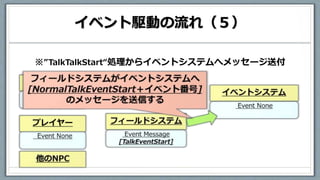
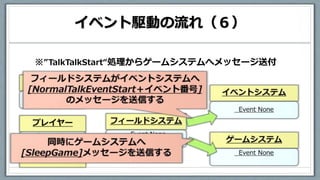
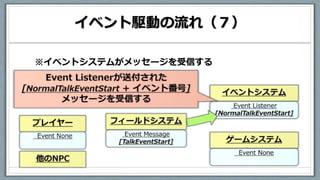
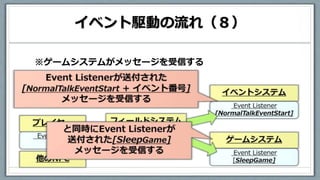
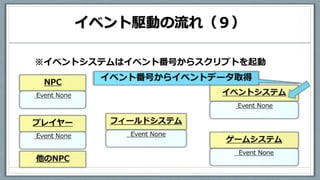
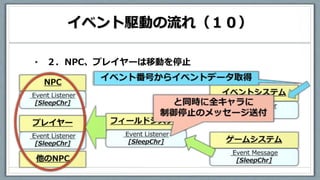
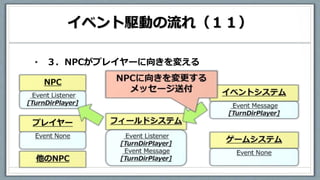
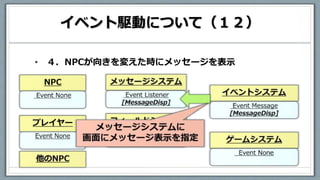
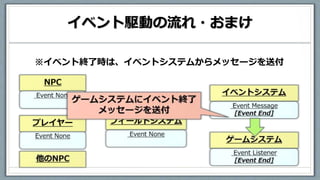
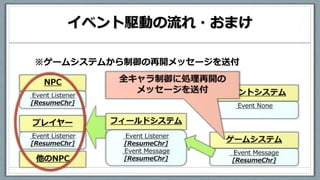
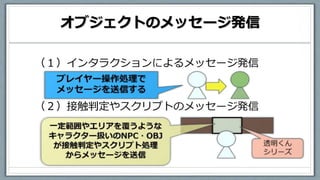
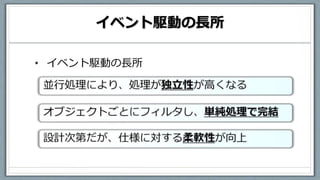
2015年12月1日に行われた【#techbuzz】モバイル・コンシューマ「開発比較」勉強会 #3【RPGにおけるイベント駆動型の設計と実装】での講演内容です。 https://atnd.org/events/72184