Download to read offline

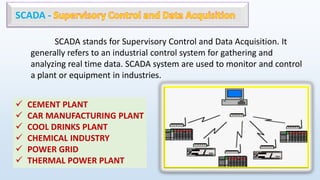






The document provides an overview of robotics, focusing on its role in industrial settings, where it automates tasks traditionally performed by humans. It discusses the significance of controllers in robotics, such as PLCs and SCADA systems, and introduces the concept of Industry 4.0, highlighting its efficiency and benefits. In conclusion, the document emphasizes the advantages of robotics and automation for the future of work and technological development.



































































