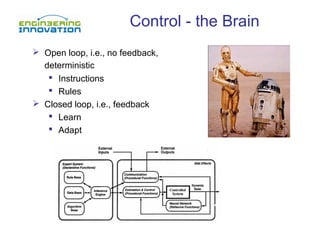
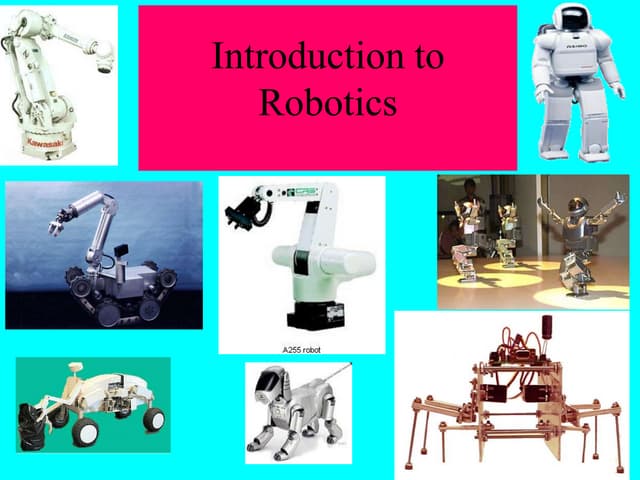
The document discusses various topics related to robotics including favorite robots like Robby from Forbidden Planet and Robocop, good robotics videos on swimming fish robots and robot wars, definitions of a robot, what tasks robots are good and bad at compared to humans, what subsystems make up a robot like action, sensors, control and power supply, different types of robot movement including joints, degrees of freedom, mobility options, common robot sensors and their uses, and open vs closed loop control systems.