Download as PDF, PPTX

![Reference
[1] Sami Haddadin, Alessandro De Luca, Albu-Schaffer, “Robot Collisions: A Survey
on Detection, Isolation, and Identification”, TRO, 2017.
[2] A. De Luca and L. Ferrajoli, “A modified Newton-Euler method for dynamic
computations in robot fault detection and control,” in Proc. IEEE
Int. Conf. Robot. Autom., 2009, pp. 3359–3364.
[3] L. Le Tien, A. Albu-Sch¨affer, A. De Luca, and G. Hirzinger, “Friction
observer and compensation for control of robotswith joint torque measurement,”
in Proc. IEEE/RSJ Int. Conf. Intell. Robots Syst., 2008, pp. 3789–
3795.
[4] A. Albu-Sch¨affer, C. Ott, and G. Hirzinger, “A unified passivity-based
control framework for position, torque and impedance control of flexible
joint robots,” Int. J. Robot. Res., vol. 26, pp. 23–39, 2007.](https://image.slidesharecdn.com/review-robot-collisions-survey-190825102207/85/Review-robot-collisions-survey-21-320.jpg)

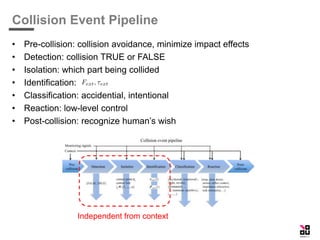
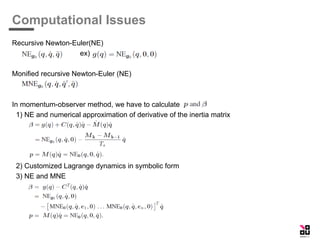
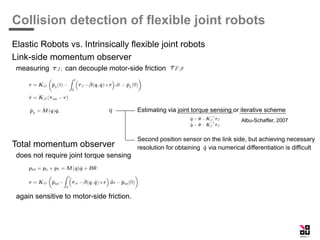
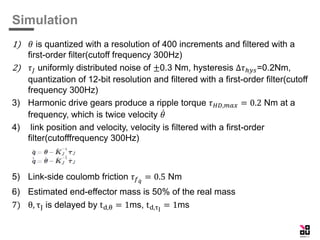
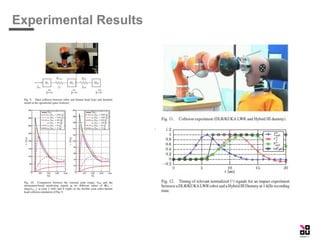
1) The document surveys methods for detecting, isolating, and identifying robot collisions using only proprioceptive sensors. 2) It describes several methods including using estimates of total energy, generalized momentum, joint acceleration, and inverse dynamics. Computational issues with each method are also discussed. 3) Experimental results applying the methods to various robot platforms like a humanoid and Kuka are presented, demonstrating the ability to detect and locate collisions using only internal sensors.
![[Review] contact model fusion](https://cdn.slidesharecdn.com/ss_thumbnails/reviewcontactmodelfusion-200217071839-thumbnail.jpg?width=640&height=640&fit=bounds)

![[Paper Review] MIT Cheetah 1: Gait-pattern, trajectory generator](https://cdn.slidesharecdn.com/ss_thumbnails/quadruped-gait-pattern-trajectory-191201092549-thumbnail.jpg?width=640&height=640&fit=bounds)





































![[ICRA 2019] Lecture 3: Impedance Control and Force Generation with DS](https://cdn.slidesharecdn.com/ss_thumbnails/impedanceforceicra2019-190602205347-thumbnail.jpg?width=640&height=640&fit=bounds)

























