Download as PDF, PPTX




![ There will be nearly 26 billion devices on the Internet of
Things by 2020.
[Gartner]
More than 30 billion devices will be wirelessly
connected to the Internet of Things by 2020
[ABI Research]
It's expected to be a 19 Trillion USD market
[John Chambers, Cisco CEO]
IoT Perspectives](https://image.slidesharecdn.com/jprimereactivejavaroboticsiot2016-160531073241/85/Reactive-Java-Robotics-IoT-jPrime-2016-13-320.jpg)
!["Basket of remotes" problem – we'll have hundreds of
applications to interface with hundreds of devices that
don't share protocols for speaking with one another
[Jean-Louis Gassée, Apple initial team, and BeOS co-founder]
Only IPv6 addresses are not enough – IoT devices
should be also easily and directly accessible for users
and [their] agents
In read/write mode
Preferably using a standard web browser
Even behind firewalls
IoT - Need for Standards](https://image.slidesharecdn.com/jprimereactivejavaroboticsiot2016-160531073241/85/Reactive-Java-Robotics-IoT-jPrime-2016-14-320.jpg)
![Common Sense: DDD
18
Actually DDD require additional efforts (as most other
divide and concur modeling approaches :)
Ubiquitous language and Bounded Contexts
DDD Application Layers:
Infrastructure, Domain, Application, Presentation
Hexagonal architecture :
OUTSIDE <-> transformer <-> ( application <-> domain )
[A. Cockburn]](https://image.slidesharecdn.com/jprimereactivejavaroboticsiot2016-160531073241/85/Reactive-Java-Robotics-IoT-jPrime-2016-18-320.jpg)
![Common Sense: DDD
19
Main concepts:
Entities, value objects and modules
Aggregates and Aggregate Roots [Haywood]:
value < entity < aggregate < module < BC
Repositories, Factories and Services:
application services <-> domain services
Separating interface from implementation](https://image.slidesharecdn.com/jprimereactivejavaroboticsiot2016-160531073241/85/Reactive-Java-Robotics-IoT-jPrime-2016-19-320.jpg)
![Reactive Manifesto
24
[http://www.reactivemanifesto.org]](https://image.slidesharecdn.com/jprimereactivejavaroboticsiot2016-160531073241/85/Reactive-Java-Robotics-IoT-jPrime-2016-24-320.jpg)
![Reactive Programming
25
Microsoft®
opens source polyglot project ReactiveX
(Reactive Extensions) [http://reactivex.io]:
Rx = Observables + LINQ + Schedulers :)
Java: RxJava, JavaScript: RxJS, C#: Rx.NET, Scala: RxScala,
Clojure: RxClojure, C++: RxCpp, Ruby: Rx.rb, Python: RxPY,
Groovy: RxGroovy, JRuby: RxJRuby, Kotlin: RxKotlin ...
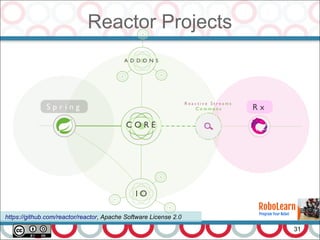
Reactive Streams Specification
[http://www.reactive-streams.org/] used by
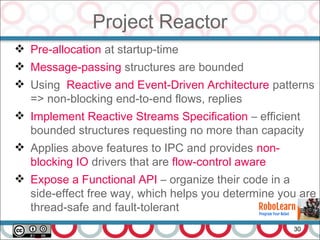
(Spring) Project Reactor
[http://projectreactor.io/]](https://image.slidesharecdn.com/jprimereactivejavaroboticsiot2016-160531073241/85/Reactive-Java-Robotics-IoT-jPrime-2016-25-320.jpg)
![FRP = Async Data Streams
28
FRP is asynchronous data-flow programming using the
building blocks of functional programming (e.g. map,
reduce, filter) and explicitly modeling time
Used for GUIs, robotics, and music. Example (RxJava):
Observable.from(new String[]{"Reactive",
"Extensions", "Java"})
.take(2).map(s -> s + " : on " + new Date())
.subscribe(s -> System.out.println(s));
Result:
Reactive : on Wed Jun 17 21:54:02 GMT+02:00 2015
Extensions : on Wed Jun 17 21:54:02 GMT+02:00 2015](https://image.slidesharecdn.com/jprimereactivejavaroboticsiot2016-160531073241/85/Reactive-Java-Robotics-IoT-jPrime-2016-28-320.jpg)

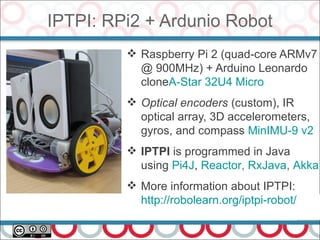


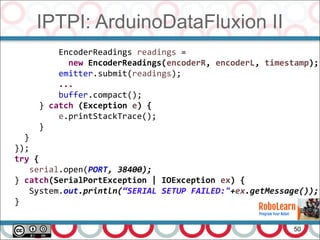
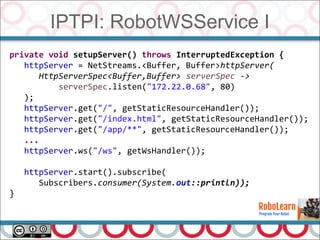
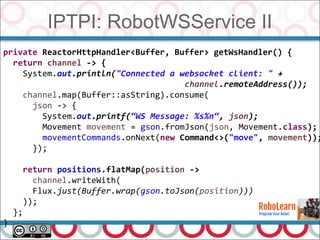
![IPTPI: IPTPIDemo II
48
//create view with controller and delegate material views
//from query services
view = new RobotView("IPTPI Reactive Robotics Demo",
controller, presentationViews);
//expose as WS service
movementSub2 = MovementFactory
.createCommandMovementSubscriber(positionsPub);
positionsService =
new RobotWSService(positionsPub, movementSub2);
}
public static void main(String[] args) {
IPTPIVoxxedDemo demo = new IPTPIVoxxedDemo();
}](https://image.slidesharecdn.com/jprimereactivejavaroboticsiot2016-160531073241/85/Reactive-Java-Robotics-IoT-jPrime-2016-48-320.jpg)
![Interested in Reactive Java?
61
Meet Us @ Java & FOSS Conferences:
BG Oracle®
User Group Conference –
3-5 June in Hotel Rila, Borovetz
[http://www.bgoug.org/bg/events/details/96.html]
TuxCon – 9-10 July, Plovdiv
[http://tuxcon.mobi/]](https://image.slidesharecdn.com/jprimereactivejavaroboticsiot2016-160531073241/85/Reactive-Java-Robotics-IoT-jPrime-2016-61-320.jpg)


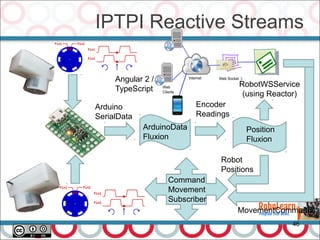
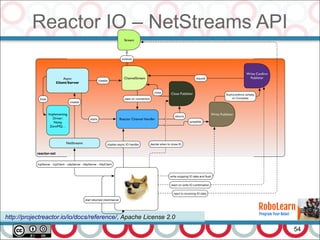
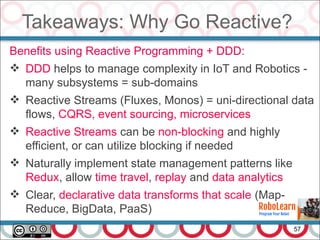
The document presents insights from Trayan Iliev, CEO of IPT, at the JPrime conference on reactive programming, robotics, and the Internet of Things (IoT). It outlines various engineering disciplines involved in robotics, discusses the challenges and tools needed to manage complexity in IoT and reactive systems, and introduces specific projects like the IPTPI robot. The document also emphasizes the potential of IoT and provides technical details on architectures and programming practices for developing reactive software applications.













![[OpenStack Day in Korea] Understanding OpenStack from SDN/NV Viewpoint](https://cdn.slidesharecdn.com/ss_thumbnails/2014-140219060920-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)








































![[Text Book] IoT Class Material - CoAP, OCF, and IoTivity](https://cdn.slidesharecdn.com/ss_thumbnails/textbookiotclassmaterial-20170814-171102090407-thumbnail.jpg?width=640&height=640&fit=bounds)