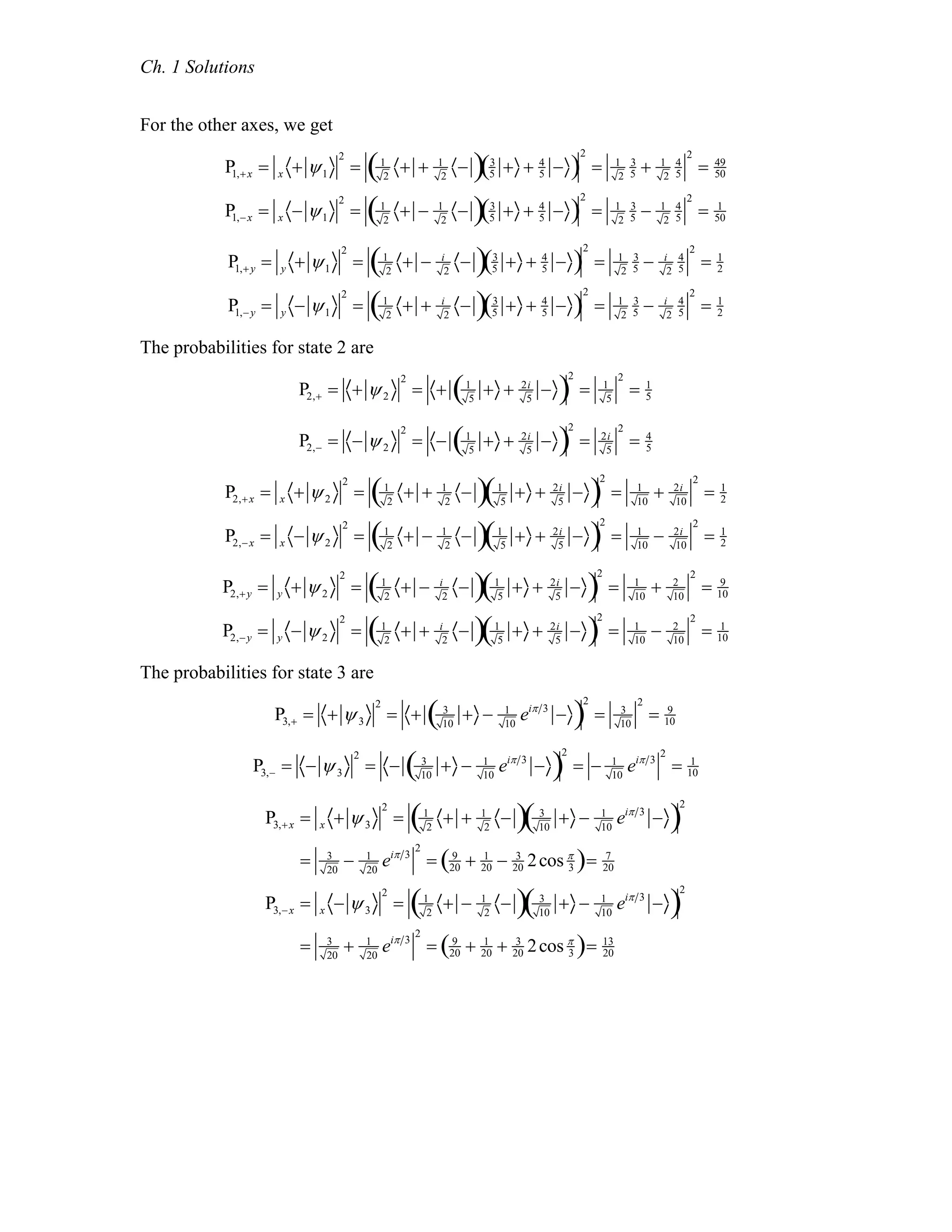
The document provides a solutions manual for quantum mechanics, detailing the normalization of wave functions and subsequent calculations for probability distributions associated with different quantum states. It includes step-by-step derivations of normalized states and their probabilities across various axes using matrix notation. The calculations cover three distinct quantum states with specific values derived for both probabilities and normalized forms.