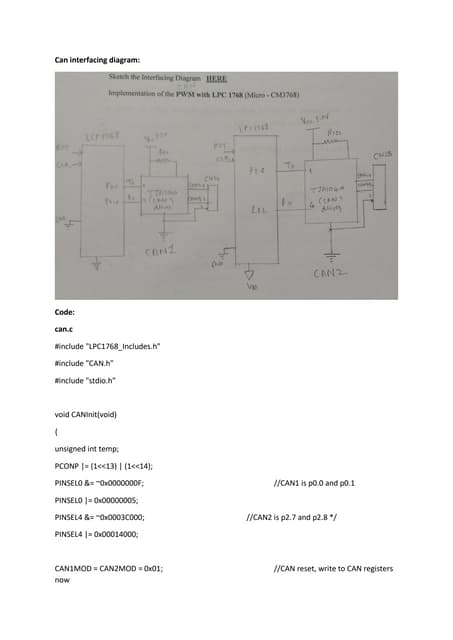
This document describes a microcontroller program for generating PWM waves and controlling a power converter system. It initializes an ADC to read voltage values, displays the voltage on an LCD, and allows the user to increment/decrement the target voltage value. A PWM function then generates pulses with varying duty cycles to control the converter voltage based on the target value.



























































![Share 'speed control_of_dc_motor_using_microcontroller.pptx'[1][1]](https://cdn.slidesharecdn.com/ss_thumbnails/sharespeedcontrolofdcmotorusingmicrocontroller-181012151950-thumbnail.jpg?width=640&height=640&fit=bounds)