Progress report for research paper
•Download as DOCX, PDF•
1 like•465 views

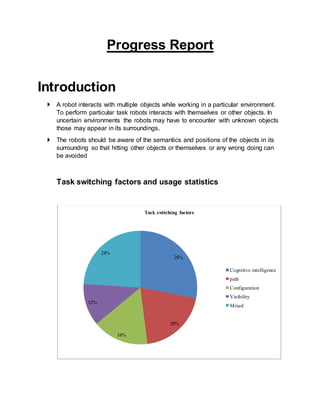
A robot interacts with multiple objects while working in a particular environment. To perform particular task robots interacts with themselves or other objects. In uncertain environments the robots may have to encounter with unknown objects those may appear in its surroundings. The robots should be aware of the semantics and positions of the objects in its surrounding so that hitting other objects or themselves or any wrong doing can be avoided
Report
Share
Report
Share

Recommended
Creating a successful research project
This resource explains the steps involved in creating a successful research project
ROBOT HUMAN INTERFACE FOR HOUSEKEEPER ROBOT WITH WIRELESS CAPABILITIES
This paper presents the design and implementation of a Human Interface for a housekeeper robot. It bases
on the idea of making the robot understand the human needs without making the human go through the
details of robots work, for example, the way that the robot implements the work or the method that the
robot uses to plan the path in order to reach the work area. The interface commands based on idioms of the
natural human language and designed in a manner that the user gives the robot several commands with
their execution date/time. As a result, the robot has a list of tasks to be doneon certain dates/times.
However, the robot performs the tasks assigned to it without any human intervention and then gives
feedback to the human about each task progress in a dedicated list. As well as, the user decides to get the
feedback either through the interface, through the wireless communication, or both of them. Hence, the
user’s presence not necessary during the robot tasks execution.
A Novel Prototype Model for Swarm Mobile Robot Navigation Based Fuzzy Logic C...
A Novel Prototype Model for Swarm Mobile Robot Navigation Based Fuzzy Logic C...AIRCC Publishing Corporation
Autonomous mobile robots have been used to carry out different tasks without continuous human guidance. To achieve the tasks, they must be able to navigate and avoid different kinds of obstacles that faced them. Navigation means that the robot can move through the environment to reach a destination. Obstacles avoidance considers a challenge which robot must overcome. In this work, the authors propose an efficient technique for obstacles avoidance through navigation of swarm mobile robot in an unstructured environment. All robots cooperate with each other to avoid obstacles. The robots detect the obstacles position around them and store their positions in shared memory. By accessing the shared memory, the other robots of the swarm can avoid the detected obstacles when they face them. To implement this idea, the Authors used a MATLAB® and V-REP® (Virtual Robot Experimentation Platform).A NOVEL PROTOTYPE MODEL FOR SWARM MOBILE ROBOT NAVIGATION BASED FUZZY LOGIC C...
Autonomous mobile robots have been used to carry out different tasks without continuous human guidance.
To achieve the tasks, they must be able to navigate and avoid different kinds of obstacles that faced them.
Navigation means that the robot can move through the environment to reach a destination. Obstacles
avoidance considers a challenge which robot must overcome. In this work, the authors propose an efficient
technique for obstacles avoidance through navigation of swarm mobile robot in an unstructured
environment. All robots cooperate with each other to avoid obstacles. The robots detect the obstacles
position around them and store their positions in shared memory. By accessing the shared memory, the
other robots of the swarm can avoid the detected obstacles when they face them. To implement this idea,
the Authors used a MATLAB® and V-REP® (Virtual Robot Experimentation Platform).
Recommended
Creating a successful research project
This resource explains the steps involved in creating a successful research project
ROBOT HUMAN INTERFACE FOR HOUSEKEEPER ROBOT WITH WIRELESS CAPABILITIES
This paper presents the design and implementation of a Human Interface for a housekeeper robot. It bases
on the idea of making the robot understand the human needs without making the human go through the
details of robots work, for example, the way that the robot implements the work or the method that the
robot uses to plan the path in order to reach the work area. The interface commands based on idioms of the
natural human language and designed in a manner that the user gives the robot several commands with
their execution date/time. As a result, the robot has a list of tasks to be doneon certain dates/times.
However, the robot performs the tasks assigned to it without any human intervention and then gives
feedback to the human about each task progress in a dedicated list. As well as, the user decides to get the
feedback either through the interface, through the wireless communication, or both of them. Hence, the
user’s presence not necessary during the robot tasks execution.
A Novel Prototype Model for Swarm Mobile Robot Navigation Based Fuzzy Logic C...
A Novel Prototype Model for Swarm Mobile Robot Navigation Based Fuzzy Logic C...AIRCC Publishing Corporation
Autonomous mobile robots have been used to carry out different tasks without continuous human guidance. To achieve the tasks, they must be able to navigate and avoid different kinds of obstacles that faced them. Navigation means that the robot can move through the environment to reach a destination. Obstacles avoidance considers a challenge which robot must overcome. In this work, the authors propose an efficient technique for obstacles avoidance through navigation of swarm mobile robot in an unstructured environment. All robots cooperate with each other to avoid obstacles. The robots detect the obstacles position around them and store their positions in shared memory. By accessing the shared memory, the other robots of the swarm can avoid the detected obstacles when they face them. To implement this idea, the Authors used a MATLAB® and V-REP® (Virtual Robot Experimentation Platform).A NOVEL PROTOTYPE MODEL FOR SWARM MOBILE ROBOT NAVIGATION BASED FUZZY LOGIC C...
Autonomous mobile robots have been used to carry out different tasks without continuous human guidance.
To achieve the tasks, they must be able to navigate and avoid different kinds of obstacles that faced them.
Navigation means that the robot can move through the environment to reach a destination. Obstacles
avoidance considers a challenge which robot must overcome. In this work, the authors propose an efficient
technique for obstacles avoidance through navigation of swarm mobile robot in an unstructured
environment. All robots cooperate with each other to avoid obstacles. The robots detect the obstacles
position around them and store their positions in shared memory. By accessing the shared memory, the
other robots of the swarm can avoid the detected obstacles when they face them. To implement this idea,
the Authors used a MATLAB® and V-REP® (Virtual Robot Experimentation Platform).
MODEL PREDICTIVE CONTROL BASED JUMPINGOF ROBOTIC LEG ON A PARTICULAR HEIGHT U...
https://www.irjet.net/archives/V10/i7/IRJET-V10I713.pdf
Human robot interaction
Human–robot interaction is the study of interactions between humans and robots. It is often referred as HRI by researchers. Human–robot interaction is a multidisciplinary field with contributions from human–computer interaction, artificial intelligence, robotics, natural language understanding, design, and social sciences.
Robotics power presentation.
It's a really a great privilege,proud & honor as well that I instated a PPT on Robotics power presentation which was amazed so many people and hope u people also 'll be obliged & benefited.....................................My good wishes with ye always . Thank you.
Robot Software Functions (By Dr. J. Jeya Jeevahan)
Robot Software Functions (By Dr. J. Jeya Jeevahan)Sathyabama Institute of Science and Technology, Chennai
This presentation shows the robot software functions.Presentation on Robotics
This presentation will cover:
1. Brief Introduction
2. History
3. Robotic Technology
4. Types and Applications
5. Advantages & Disadvantages
6. Futuristic View
7. Conclusion
................................................
Hope you will find this helpful.
Regards
M. Awais Akhter
Software Engineer
IRJET- Swarm Robotics and their Potential to be Applied in Real Life Problems
https://www.irjet.net/archives/V6/i6/IRJET-V6I611.pdf
Page 1 of 14 ENS4152 Project Development Proposal a.docx
Page 1 of 14
ENS4152 Project Development
Proposal and Risk Assessment Report
Baxter Research Robot: Solving a Rubik’s Cube
Chris Dawes
Student # 10282558
30 Mar 2015
Supervisor: Dr Alexander Rassau
Page 2 of 14
Abstract
Robotics is currently used to perform many tasks but many of these are simple repetition of a
predefined method. By combining AI with robotics we can greatly increase the applications of
robotics. An algorithm that combines the vision and servo systems of a Baxter Research Robot
with a solving solution for a Rubik’s cube will demonstrate that the use of even simple AI with
robotics allows complex tasks to be completed. Further integration of object recognition will
allow the task to be completed in a dynamic environment, and further increase the areas
robots are capable of working within.
1. Introduction
1.1. Motivation
The Baxter Research Robot by Rethink Robotics is a dual arm robot, with seven degrees of
freedom per arm, released in 2012. Developed to be affordable, flexible in its purpose, and
above all else safe, Baxter includes three cameras, one on each wrist and the other on its head,
and a screen for displaying information relating to Baxter’s current task. The robot is designed
to be a versatile research platform while containing the same hardware as its industry
counterpart, allowing research to translate into industrial applications (Rethink Robotics,
2015).
In general robotics artificial intelligence (AI) has been developed separately to robotics, but is
now starting to become integrated. Unfortunately current AI is fragmented as each application
focuses on one area, as opposed to making a true AI that thinks like a human (Bogue, 2014).
Current usable AI is more akin to ‘smart’ robotics where decisions are made and problems
solved by the robot in very specific applications. In industry, robots are expanding into areas
that require more flexibility allowing robots to fill many more positions in increasingly complex
areas (Hajduk, Jenčík, Jezný, & Vargovčík, 2013). Mobile robots are even becoming more
common place, allowing for dynamic and spread out workspaces. These are all due to adding
sensing and analysis to robots allowing them to react to dynamic environments.
To further robotics in industry, multi robot work cells have been designed that combine
several robots working on the same part while cooperatively performing either one task, such
as welding and the required handling, or multiple tasks at the same time (Hajduk, Jenčík, Jezný,
& Vargovčík, 2013). The number of activities these work cells can perform increases
Page 3 of 14
dramatically, as the complexity of the task or tasks can be higher while the robots don’t need
to be capable of performing the whole task individually.
For performing more human tasks, dual arm robots have begun to emerge (Hajduk, Jenčík,
Jezný, & Vargovčík, 2013 ...
Page 1 of 14 ENS4152 Project Development Proposal a.docx
Page 1 of 14
ENS4152 Project Development
Proposal and Risk Assessment Report
Baxter Research Robot: Solving a Rubik’s Cube
Chris Dawes
Student # 10282558
30 Mar 2015
Supervisor: Dr Alexander Rassau
Page 2 of 14
Abstract
Robotics is currently used to perform many tasks but many of these are simple repetition of a
predefined method. By combining AI with robotics we can greatly increase the applications of
robotics. An algorithm that combines the vision and servo systems of a Baxter Research Robot
with a solving solution for a Rubik’s cube will demonstrate that the use of even simple AI with
robotics allows complex tasks to be completed. Further integration of object recognition will
allow the task to be completed in a dynamic environment, and further increase the areas
robots are capable of working within.
1. Introduction
1.1. Motivation
The Baxter Research Robot by Rethink Robotics is a dual arm robot, with seven degrees of
freedom per arm, released in 2012. Developed to be affordable, flexible in its purpose, and
above all else safe, Baxter includes three cameras, one on each wrist and the other on its head,
and a screen for displaying information relating to Baxter’s current task. The robot is designed
to be a versatile research platform while containing the same hardware as its industry
counterpart, allowing research to translate into industrial applications (Rethink Robotics,
2015).
In general robotics artificial intelligence (AI) has been developed separately to robotics, but is
now starting to become integrated. Unfortunately current AI is fragmented as each application
focuses on one area, as opposed to making a true AI that thinks like a human (Bogue, 2014).
Current usable AI is more akin to ‘smart’ robotics where decisions are made and problems
solved by the robot in very specific applications. In industry, robots are expanding into areas
that require more flexibility allowing robots to fill many more positions in increasingly complex
areas (Hajduk, Jenčík, Jezný, & Vargovčík, 2013). Mobile robots are even becoming more
common place, allowing for dynamic and spread out workspaces. These are all due to adding
sensing and analysis to robots allowing them to react to dynamic environments.
To further robotics in industry, multi robot work cells have been designed that combine
several robots working on the same part while cooperatively performing either one task, such
as welding and the required handling, or multiple tasks at the same time (Hajduk, Jenčík, Jezný,
& Vargovčík, 2013). The number of activities these work cells can perform increases
Page 3 of 14
dramatically, as the complexity of the task or tasks can be higher while the robots don’t need
to be capable of performing the whole task individually.
For performing more human tasks, dual arm robots have begun to emerge (Hajduk, Jenčík,
Jezný, & Vargovčík, 2013.
Page 1 of 14 ENS4152 Project Development Proposal a.docx
Page 1 of 14
ENS4152 Project Development
Proposal and Risk Assessment Report
Baxter Research Robot: Solving a Rubik’s Cube
Chris Dawes
Student # 10282558
30 Mar 2015
Supervisor: Dr Alexander Rassau
Page 2 of 14
Abstract
Robotics is currently used to perform many tasks but many of these are simple repetition of a
predefined method. By combining AI with robotics we can greatly increase the applications of
robotics. An algorithm that combines the vision and servo systems of a Baxter Research Robot
with a solving solution for a Rubik’s cube will demonstrate that the use of even simple AI with
robotics allows complex tasks to be completed. Further integration of object recognition will
allow the task to be completed in a dynamic environment, and further increase the areas
robots are capable of working within.
1. Introduction
1.1. Motivation
The Baxter Research Robot by Rethink Robotics is a dual arm robot, with seven degrees of
freedom per arm, released in 2012. Developed to be affordable, flexible in its purpose, and
above all else safe, Baxter includes three cameras, one on each wrist and the other on its head,
and a screen for displaying information relating to Baxter’s current task. The robot is designed
to be a versatile research platform while containing the same hardware as its industry
counterpart, allowing research to translate into industrial applications (Rethink Robotics,
2015).
In general robotics artificial intelligence (AI) has been developed separately to robotics, but is
now starting to become integrated. Unfortunately current AI is fragmented as each application
focuses on one area, as opposed to making a true AI that thinks like a human (Bogue, 2014).
Current usable AI is more akin to ‘smart’ robotics where decisions are made and problems
solved by the robot in very specific applications. In industry, robots are expanding into areas
that require more flexibility allowing robots to fill many more positions in increasingly complex
areas (Hajduk, Jenčík, Jezný, & Vargovčík, 2013). Mobile robots are even becoming more
common place, allowing for dynamic and spread out workspaces. These are all due to adding
sensing and analysis to robots allowing them to react to dynamic environments.
To further robotics in industry, multi robot work cells have been designed that combine
several robots working on the same part while cooperatively performing either one task, such
as welding and the required handling, or multiple tasks at the same time (Hajduk, Jenčík, Jezný,
& Vargovčík, 2013). The number of activities these work cells can perform increases
Page 3 of 14
dramatically, as the complexity of the task or tasks can be higher while the robots don’t need
to be capable of performing the whole task individually.
For performing more human tasks, dual arm robots have begun to emerge (Hajduk, Jenčík,
Jezný, & Vargovčík, 2013.
Robotics Starter Guide - Dream School
Robotics Starter Guide - Dream School
Here you will get an overview of the field of Robotics.
What is Robotics? Fundamentals of Robotics, Application of Robotics. What is Machine Learning? What is Artificial Intelligence? What is Computer Vision and more.
This is a very basic starter guide to give you an understanding of the field. If you want to learn more in-depth, please visit www.dreamschool.xyz
Intelligent Robotics Navigation System: Problems, Methods, and Algorithm
This paper set out to supplement new studies with a brief and comprehensible review of the advanced development in the area of the navigation system, starting from a single robot, multi-robot, and swarm robots from a particular perspective by taking insights from these biological systems. The inspiration is taken from nature by observing the human and the social animal that is believed to be very beneficial for this purpose. The intelligent navigation system is developed based on an individual characteristic or a social animal biological structure. The discussion of this paper will focus on how simple agent’s structure utilizes flexible and potential outcomes in order to navigate in a productive and unorganized surrounding. The combination of the navigation system and biologically inspired approach has attracted considerable attention, which makes it an important research area in the intelligent robotic system. Overall, this paper explores the implementation, which is resulted from the simulation performed by the embodiment of robots operating in real environments.
***भारत की जय जय कार ***
एक राष्ट्र बनाएं , हम सब मिलकर ।
द्वेष - भाव को भूलकर ।।
बन जाये हम सब , एक परिवार ।
करके " कोरोना महामारी " , पर वार ।।
दुनिया करती है , अब नमस्कार ।
आओ जग में फैलाएं , भारत का ये संस्कार ।।
हर नर- नारी की अब यही पुकार।
मिलकर करें भारत की जय-जय कार।।
कोरोना खड़ा है, घर के द्वार ।
करने हम सब पर, अपना प्रहार ।।
हैं हम भी लड़ने को तैयार ।
आओ मिलकर करें राष्ट्र निर्माण ।।
- रचनाकार श्री शोभित सक्सेना , उत्तम नगर , दिल्ली - ५९
DFD For E-learning Project
DFD For E-learning Project
Three modules admin,parents,student
DFD for each module
DFD For E-Learning Admin Teacher Create User Create User Create Course Messaging Student Parents Assign course Whole System Create Exam Grade Upload Result Video Stemming Upload course material Messaging Exam participate Watch & Update notice Getting study material Getting Result Video Stemming Messaging Participate in class View Result News update View grade Study materials Feedback Assign teacher,studt,prnt Giving Grade Grade & course lock
More Related Content
Similar to Progress report for research paper
MODEL PREDICTIVE CONTROL BASED JUMPINGOF ROBOTIC LEG ON A PARTICULAR HEIGHT U...
https://www.irjet.net/archives/V10/i7/IRJET-V10I713.pdf
Human robot interaction
Human–robot interaction is the study of interactions between humans and robots. It is often referred as HRI by researchers. Human–robot interaction is a multidisciplinary field with contributions from human–computer interaction, artificial intelligence, robotics, natural language understanding, design, and social sciences.
Robotics power presentation.
It's a really a great privilege,proud & honor as well that I instated a PPT on Robotics power presentation which was amazed so many people and hope u people also 'll be obliged & benefited.....................................My good wishes with ye always . Thank you.
Robot Software Functions (By Dr. J. Jeya Jeevahan)
Robot Software Functions (By Dr. J. Jeya Jeevahan)Sathyabama Institute of Science and Technology, Chennai
This presentation shows the robot software functions.Presentation on Robotics
This presentation will cover:
1. Brief Introduction
2. History
3. Robotic Technology
4. Types and Applications
5. Advantages & Disadvantages
6. Futuristic View
7. Conclusion
................................................
Hope you will find this helpful.
Regards
M. Awais Akhter
Software Engineer
IRJET- Swarm Robotics and their Potential to be Applied in Real Life Problems
https://www.irjet.net/archives/V6/i6/IRJET-V6I611.pdf
Page 1 of 14 ENS4152 Project Development Proposal a.docx
Page 1 of 14
ENS4152 Project Development
Proposal and Risk Assessment Report
Baxter Research Robot: Solving a Rubik’s Cube
Chris Dawes
Student # 10282558
30 Mar 2015
Supervisor: Dr Alexander Rassau
Page 2 of 14
Abstract
Robotics is currently used to perform many tasks but many of these are simple repetition of a
predefined method. By combining AI with robotics we can greatly increase the applications of
robotics. An algorithm that combines the vision and servo systems of a Baxter Research Robot
with a solving solution for a Rubik’s cube will demonstrate that the use of even simple AI with
robotics allows complex tasks to be completed. Further integration of object recognition will
allow the task to be completed in a dynamic environment, and further increase the areas
robots are capable of working within.
1. Introduction
1.1. Motivation
The Baxter Research Robot by Rethink Robotics is a dual arm robot, with seven degrees of
freedom per arm, released in 2012. Developed to be affordable, flexible in its purpose, and
above all else safe, Baxter includes three cameras, one on each wrist and the other on its head,
and a screen for displaying information relating to Baxter’s current task. The robot is designed
to be a versatile research platform while containing the same hardware as its industry
counterpart, allowing research to translate into industrial applications (Rethink Robotics,
2015).
In general robotics artificial intelligence (AI) has been developed separately to robotics, but is
now starting to become integrated. Unfortunately current AI is fragmented as each application
focuses on one area, as opposed to making a true AI that thinks like a human (Bogue, 2014).
Current usable AI is more akin to ‘smart’ robotics where decisions are made and problems
solved by the robot in very specific applications. In industry, robots are expanding into areas
that require more flexibility allowing robots to fill many more positions in increasingly complex
areas (Hajduk, Jenčík, Jezný, & Vargovčík, 2013). Mobile robots are even becoming more
common place, allowing for dynamic and spread out workspaces. These are all due to adding
sensing and analysis to robots allowing them to react to dynamic environments.
To further robotics in industry, multi robot work cells have been designed that combine
several robots working on the same part while cooperatively performing either one task, such
as welding and the required handling, or multiple tasks at the same time (Hajduk, Jenčík, Jezný,
& Vargovčík, 2013). The number of activities these work cells can perform increases
Page 3 of 14
dramatically, as the complexity of the task or tasks can be higher while the robots don’t need
to be capable of performing the whole task individually.
For performing more human tasks, dual arm robots have begun to emerge (Hajduk, Jenčík,
Jezný, & Vargovčík, 2013 ...
Page 1 of 14 ENS4152 Project Development Proposal a.docx
Page 1 of 14
ENS4152 Project Development
Proposal and Risk Assessment Report
Baxter Research Robot: Solving a Rubik’s Cube
Chris Dawes
Student # 10282558
30 Mar 2015
Supervisor: Dr Alexander Rassau
Page 2 of 14
Abstract
Robotics is currently used to perform many tasks but many of these are simple repetition of a
predefined method. By combining AI with robotics we can greatly increase the applications of
robotics. An algorithm that combines the vision and servo systems of a Baxter Research Robot
with a solving solution for a Rubik’s cube will demonstrate that the use of even simple AI with
robotics allows complex tasks to be completed. Further integration of object recognition will
allow the task to be completed in a dynamic environment, and further increase the areas
robots are capable of working within.
1. Introduction
1.1. Motivation
The Baxter Research Robot by Rethink Robotics is a dual arm robot, with seven degrees of
freedom per arm, released in 2012. Developed to be affordable, flexible in its purpose, and
above all else safe, Baxter includes three cameras, one on each wrist and the other on its head,
and a screen for displaying information relating to Baxter’s current task. The robot is designed
to be a versatile research platform while containing the same hardware as its industry
counterpart, allowing research to translate into industrial applications (Rethink Robotics,
2015).
In general robotics artificial intelligence (AI) has been developed separately to robotics, but is
now starting to become integrated. Unfortunately current AI is fragmented as each application
focuses on one area, as opposed to making a true AI that thinks like a human (Bogue, 2014).
Current usable AI is more akin to ‘smart’ robotics where decisions are made and problems
solved by the robot in very specific applications. In industry, robots are expanding into areas
that require more flexibility allowing robots to fill many more positions in increasingly complex
areas (Hajduk, Jenčík, Jezný, & Vargovčík, 2013). Mobile robots are even becoming more
common place, allowing for dynamic and spread out workspaces. These are all due to adding
sensing and analysis to robots allowing them to react to dynamic environments.
To further robotics in industry, multi robot work cells have been designed that combine
several robots working on the same part while cooperatively performing either one task, such
as welding and the required handling, or multiple tasks at the same time (Hajduk, Jenčík, Jezný,
& Vargovčík, 2013). The number of activities these work cells can perform increases
Page 3 of 14
dramatically, as the complexity of the task or tasks can be higher while the robots don’t need
to be capable of performing the whole task individually.
For performing more human tasks, dual arm robots have begun to emerge (Hajduk, Jenčík,
Jezný, & Vargovčík, 2013.
Page 1 of 14 ENS4152 Project Development Proposal a.docx
Page 1 of 14
ENS4152 Project Development
Proposal and Risk Assessment Report
Baxter Research Robot: Solving a Rubik’s Cube
Chris Dawes
Student # 10282558
30 Mar 2015
Supervisor: Dr Alexander Rassau
Page 2 of 14
Abstract
Robotics is currently used to perform many tasks but many of these are simple repetition of a
predefined method. By combining AI with robotics we can greatly increase the applications of
robotics. An algorithm that combines the vision and servo systems of a Baxter Research Robot
with a solving solution for a Rubik’s cube will demonstrate that the use of even simple AI with
robotics allows complex tasks to be completed. Further integration of object recognition will
allow the task to be completed in a dynamic environment, and further increase the areas
robots are capable of working within.
1. Introduction
1.1. Motivation
The Baxter Research Robot by Rethink Robotics is a dual arm robot, with seven degrees of
freedom per arm, released in 2012. Developed to be affordable, flexible in its purpose, and
above all else safe, Baxter includes three cameras, one on each wrist and the other on its head,
and a screen for displaying information relating to Baxter’s current task. The robot is designed
to be a versatile research platform while containing the same hardware as its industry
counterpart, allowing research to translate into industrial applications (Rethink Robotics,
2015).
In general robotics artificial intelligence (AI) has been developed separately to robotics, but is
now starting to become integrated. Unfortunately current AI is fragmented as each application
focuses on one area, as opposed to making a true AI that thinks like a human (Bogue, 2014).
Current usable AI is more akin to ‘smart’ robotics where decisions are made and problems
solved by the robot in very specific applications. In industry, robots are expanding into areas
that require more flexibility allowing robots to fill many more positions in increasingly complex
areas (Hajduk, Jenčík, Jezný, & Vargovčík, 2013). Mobile robots are even becoming more
common place, allowing for dynamic and spread out workspaces. These are all due to adding
sensing and analysis to robots allowing them to react to dynamic environments.
To further robotics in industry, multi robot work cells have been designed that combine
several robots working on the same part while cooperatively performing either one task, such
as welding and the required handling, or multiple tasks at the same time (Hajduk, Jenčík, Jezný,
& Vargovčík, 2013). The number of activities these work cells can perform increases
Page 3 of 14
dramatically, as the complexity of the task or tasks can be higher while the robots don’t need
to be capable of performing the whole task individually.
For performing more human tasks, dual arm robots have begun to emerge (Hajduk, Jenčík,
Jezný, & Vargovčík, 2013.
Robotics Starter Guide - Dream School
Robotics Starter Guide - Dream School
Here you will get an overview of the field of Robotics.
What is Robotics? Fundamentals of Robotics, Application of Robotics. What is Machine Learning? What is Artificial Intelligence? What is Computer Vision and more.
This is a very basic starter guide to give you an understanding of the field. If you want to learn more in-depth, please visit www.dreamschool.xyz
Intelligent Robotics Navigation System: Problems, Methods, and Algorithm
This paper set out to supplement new studies with a brief and comprehensible review of the advanced development in the area of the navigation system, starting from a single robot, multi-robot, and swarm robots from a particular perspective by taking insights from these biological systems. The inspiration is taken from nature by observing the human and the social animal that is believed to be very beneficial for this purpose. The intelligent navigation system is developed based on an individual characteristic or a social animal biological structure. The discussion of this paper will focus on how simple agent’s structure utilizes flexible and potential outcomes in order to navigate in a productive and unorganized surrounding. The combination of the navigation system and biologically inspired approach has attracted considerable attention, which makes it an important research area in the intelligent robotic system. Overall, this paper explores the implementation, which is resulted from the simulation performed by the embodiment of robots operating in real environments.
Similar to Progress report for research paper (20)
MODEL PREDICTIVE CONTROL BASED JUMPINGOF ROBOTIC LEG ON A PARTICULAR HEIGHT U...
MODEL PREDICTIVE CONTROL BASED JUMPINGOF ROBOTIC LEG ON A PARTICULAR HEIGHT U...
Robot Software Functions (By Dr. J. Jeya Jeevahan)
Robot Software Functions (By Dr. J. Jeya Jeevahan)
IRJET- Swarm Robotics and their Potential to be Applied in Real Life Problems
IRJET- Swarm Robotics and their Potential to be Applied in Real Life Problems
To Ask or To Sense? Planning to Integrate Speech and Sensorimotor Acts
To Ask or To Sense? Planning to Integrate Speech and Sensorimotor Acts
Page 1 of 14 ENS4152 Project Development Proposal a.docx
Page 1 of 14 ENS4152 Project Development Proposal a.docx
Page 1 of 14 ENS4152 Project Development Proposal a.docx
Page 1 of 14 ENS4152 Project Development Proposal a.docx
Page 1 of 14 ENS4152 Project Development Proposal a.docx
Page 1 of 14 ENS4152 Project Development Proposal a.docx
Command, Goal Disambiguation, Introspection, and Instruction in Gesture-Free ...
Command, Goal Disambiguation, Introspection, and Instruction in Gesture-Free ...
Intelligent Robotics Navigation System: Problems, Methods, and Algorithm
Intelligent Robotics Navigation System: Problems, Methods, and Algorithm
More from Shobhit Saxena
***भारत की जय जय कार ***
एक राष्ट्र बनाएं , हम सब मिलकर ।
द्वेष - भाव को भूलकर ।।
बन जाये हम सब , एक परिवार ।
करके " कोरोना महामारी " , पर वार ।।
दुनिया करती है , अब नमस्कार ।
आओ जग में फैलाएं , भारत का ये संस्कार ।।
हर नर- नारी की अब यही पुकार।
मिलकर करें भारत की जय-जय कार।।
कोरोना खड़ा है, घर के द्वार ।
करने हम सब पर, अपना प्रहार ।।
हैं हम भी लड़ने को तैयार ।
आओ मिलकर करें राष्ट्र निर्माण ।।
- रचनाकार श्री शोभित सक्सेना , उत्तम नगर , दिल्ली - ५९
DFD For E-learning Project
DFD For E-learning Project
Three modules admin,parents,student
DFD for each module
DFD For E-Learning Admin Teacher Create User Create User Create Course Messaging Student Parents Assign course Whole System Create Exam Grade Upload Result Video Stemming Upload course material Messaging Exam participate Watch & Update notice Getting study material Getting Result Video Stemming Messaging Participate in class View Result News update View grade Study materials Feedback Assign teacher,studt,prnt Giving Grade Grade & course lock
Index page of lab file
Index page of lab file
Index page of lab file
Index page of lab file
Index page of lab file
Index page of lab file
Index page of lab file
Index page of lab file
Index page of lab file
Write a program to perform Perspective projection
: Perspective projection is a form of pictorial drawing that gives the illusion of depth onto a flat surface, very similar to that of viewing of the object through the human eye. In comparison to other types of projection systems, for example orthographic and oblique, the spectator is viewing the object from infinity. The projection rays radiate parallel to each other from the object back to the spectator, compared to perspective projection where the projected rays radiate from the object to a single point at a given distance from the object. A drawing has two-point perspective when it contains two vanishing points on the horizon line. In an illustration, these vanishing points can be placed arbitrarily along the horizon.Two-point perspective can be used to draw the same objects as one-point perspective, rotated: looking at the corner of a house, or looking at two forked roads shrink into the distance.Three-point perspective is usually used for buildings seen from above (or below). In addition to the two vanishing points from before, one for each wall, there is now one for how those walls recede into the ground. This third vanishing point will be below the ground. Looking up at a tall building is another common example of the third vanishing point.
Write a program to perform Oblique projection
-Oblique projection is a simple type of technical drawing of graphical projection used for producing pictorial, two-dimensional images of three-dimensional objects.
Oblique projection is a type of parallel projection:
• it projects an image by intersecting parallel rays (projectors)
• from the three-dimensional source object with the drawing surface (projection plane).
In both oblique projection and orthographic projection, parallel lines of the source object produce parallel lines in the projected image. The projectors in oblique projection intersect the projection plane at an oblique angle to produce the projected image, as opposed to the perpendicular angle used in orthographic projection. Mathematically, the parallel projection of the point (x, y, z) on the xy-plane gives (x+az, y+bz, 0). The constants a and b uniquely specify a parallel projection. When a = b = 0, the projection is said to be "orthographic" or "orthogonal". Otherwise, it is "oblique". The constants a and b are not necessarily less than 1, and as a consequence lengths measured on an oblique projection may be either larger or shorter than they were in space. In a general oblique projection, spheres of the space are projected as ellipses on the drawing plane, and not as circles as you would expect them from an orthogonal projection.Oblique drawing is also the crudest "3D" drawing method but the easiest to master. Oblique is not really a 3D system but a two-dimensional view of an object with 'forced depth'. One way to draw using an oblique view is to draw the side of the object you are looking at in two dimensions, i.e. flat, and then draw the other sides at an angle of 45 degrees, but instead of drawing the sides full size they are only drawn with half the depth creating 'forced depth' –adding an element of realism to the object. Even with this 'forced depth', oblique drawings look very unconvincing to the eye. For this reason oblique is rarely used by professional designers and engineers.
Write a program to perform Orthographic projection.
Orthographic Projection is a way of drawing an 3D object from different directions. Usually a front, side and plan view are drawn so that a person looking at the drawing can see all the important sides. Orthographic drawings are useful especially when a design has been developed to a stage whereby it is almost ready to manufacture.Within orthographic projection there is the subcategory known as pictorials. Axonometric pictorials show an image of an object as viewed from a skew direction in order to reveal all three directions (axes) of space in a single picture. Orthographic pictorial instrument drawings are often used to approximate graphical perspective projections, but there is attendant distortion in the approximation. Because pictorial projections inherently have this distortion, in the instrument drawing of pictorials, great liberties may then be taken for economy of effort and best effect. Orthographic pictorials rely on the technique of axonometric projection.
Write a program to draw a cubic Bezier curve.
Four points P0, P1, P2 and P3 in the plane or in higher-dimensional space define a cubic Bézier curve. The curve starts at P0 going toward P1 and arrives at P3 coming from the direction of P2. Usually, it will not pass through P1 or P2; these points are only there to provide directional information. The distance between P0 and P1 determines "how long" the curve moves into direction P2 before turning towards P3
Write a program to perform translation.
- To translate an object by a vector v, each homogeneous vector p (written in homogeneous coordinates) would need to be multiplied by thistranslation matrix
Graphics and Graphics Hardware System
Computer graphics are pictures and movies created using computers - usually referring to image data created by a computer specifically with help from specialized graphical hardware and software. It is a vast and recent area in computer science. The phrase was coined by computer graphics researchers Verne Hudson and William Fetter of Boeing in 1960. Another name for the field is computer-generated imagery, or simply CGI.
WEEKLY PROGRESS REPORT (WPR) for DISSERTATION
Synopsis submission & approval
February - Literature Review & Data collection
March - Implementation & Results with analysis
April - Documentation and Publication
Opticalcharacter recognition
Optical character recognition, usually abbreviated to OCR, is the mechanical or electronic conversion of scanned images of handwritten, typewritten or printed text into machine-encoded text.
It is a system that provides a full alphanumeric recognition of printed or handwritten characters at electronic speed by simply scanning the form. It is widely used as a form of data entry from some sort of original paper data source, whether documents, sales receipts, mail, or any number of printed records.
It is a common method of digitizing printed texts so that they can be electronically searched, stored more compactly, displayed on-line, and used in machine processes such as machine translation, text-to-speech and text mining.OCR is a field of research in pattern recognition, artificial intelligence and computer vision. More recently, the term Intelligent Character Recognition(ICR) has been used to describe the process of interpreting image data, in particular alphanumeric text .
Ionic app
How to use ionic framework.How can we create an app using angular js and ionic framework.In this doc file,i created an app using angular js and ionic framework.
Community outreach portfolio shobhit
Do you believe that the value of life is just minting money and to take care of those whom you love. Or did you believe that life is worth living in the schedules made by destiny. Today We are living and counting days which only aim to improve our life and those who matter. While we go to temples and pray for self and live selfishly, their those who don't have sleepers to put on or a grain to live for.
Shobhit portfolio
Everybody is rushing in their busy life denying these children for a meal which will cost less than 0.5 % of their monthly salary. Searching for a project in the Community Outreach me and my team encountered with these little kids begging for a meal and we decided that we will provide them a meal and knowledge how they can improve their life in future.
More from Shobhit Saxena (19)
Write a program to perform Orthographic projection.
Write a program to perform Orthographic projection.
Recently uploaded
Water Industry Process Automation and Control Monthly - May 2024.pdf
Water Industry Process Automation and Control Monthly - May 2024.pdfWater Industry Process Automation & Control
Welcome to WIPAC Monthly the magazine brought to you by the LinkedIn Group Water Industry Process Automation & Control.
In this month's edition, along with this month's industry news to celebrate the 13 years since the group was created we have articles including
A case study of the used of Advanced Process Control at the Wastewater Treatment works at Lleida in Spain
A look back on an article on smart wastewater networks in order to see how the industry has measured up in the interim around the adoption of Digital Transformation in the Water Industry.The Benefits and Techniques of Trenchless Pipe Repair.pdf
Explore the innovative world of trenchless pipe repair with our comprehensive guide, "The Benefits and Techniques of Trenchless Pipe Repair." This document delves into the modern methods of repairing underground pipes without the need for extensive excavation, highlighting the numerous advantages and the latest techniques used in the industry.
Learn about the cost savings, reduced environmental impact, and minimal disruption associated with trenchless technology. Discover detailed explanations of popular techniques such as pipe bursting, cured-in-place pipe (CIPP) lining, and directional drilling. Understand how these methods can be applied to various types of infrastructure, from residential plumbing to large-scale municipal systems.
Ideal for homeowners, contractors, engineers, and anyone interested in modern plumbing solutions, this guide provides valuable insights into why trenchless pipe repair is becoming the preferred choice for pipe rehabilitation. Stay informed about the latest advancements and best practices in the field.
Industrial Training at Shahjalal Fertilizer Company Limited (SFCL)
This presentation is about the working procedure of Shahjalal Fertilizer Company Limited (SFCL). A Govt. owned Company of Bangladesh Chemical Industries Corporation under Ministry of Industries.
Design and Analysis of Algorithms-DP,Backtracking,Graphs,B&B
Dynamic Programming
Backtracking
Techniques for Graphs
Branch and Bound
在线办理(ANU毕业证书)澳洲国立大学毕业证录取通知书一模一样
学校原件一模一样【微信:741003700 】《(ANU毕业证书)澳洲国立大学毕业证》【微信:741003700 】学位证,留信认证(真实可查,永久存档)原件一模一样纸张工艺/offer、雅思、外壳等材料/诚信可靠,可直接看成品样本,帮您解决无法毕业带来的各种难题!外壳,原版制作,诚信可靠,可直接看成品样本。行业标杆!精益求精,诚心合作,真诚制作!多年品质 ,按需精细制作,24小时接单,全套进口原装设备。十五年致力于帮助留学生解决难题,包您满意。
本公司拥有海外各大学样板无数,能完美还原。
1:1完美还原海外各大学毕业材料上的工艺:水印,阴影底纹,钢印LOGO烫金烫银,LOGO烫金烫银复合重叠。文字图案浮雕、激光镭射、紫外荧光、温感、复印防伪等防伪工艺。材料咨询办理、认证咨询办理请加学历顾问Q/微741003700
【主营项目】
一.毕业证【q微741003700】成绩单、使馆认证、教育部认证、雅思托福成绩单、学生卡等!
二.真实使馆公证(即留学回国人员证明,不成功不收费)
三.真实教育部学历学位认证(教育部存档!教育部留服网站永久可查)
四.办理各国各大学文凭(一对一专业服务,可全程监控跟踪进度)
如果您处于以下几种情况:
◇在校期间,因各种原因未能顺利毕业……拿不到官方毕业证【q/微741003700】
◇面对父母的压力,希望尽快拿到;
◇不清楚认证流程以及材料该如何准备;
◇回国时间很长,忘记办理;
◇回国马上就要找工作,办给用人单位看;
◇企事业单位必须要求办理的
◇需要报考公务员、购买免税车、落转户口
◇申请留学生创业基金
留信网认证的作用:
1:该专业认证可证明留学生真实身份
2:同时对留学生所学专业登记给予评定
3:国家专业人才认证中心颁发入库证书
4:这个认证书并且可以归档倒地方
5:凡事获得留信网入网的信息将会逐步更新到个人身份内,将在公安局网内查询个人身份证信息后,同步读取人才网入库信息
6:个人职称评审加20分
7:个人信誉贷款加10分
8:在国家人才网主办的国家网络招聘大会中纳入资料,供国家高端企业选择人才
Nuclear Power Economics and Structuring 2024
Title: Nuclear Power Economics and Structuring - 2024 Edition
Produced by: World Nuclear Association Published: April 2024
Report No. 2024/001
© 2024 World Nuclear Association.
Registered in England and Wales, company number 01215741
This report reflects the views
of industry experts but does not
necessarily represent those
of World Nuclear Association’s
individual member organizations.
Architectural Portfolio Sean Lockwood
This portfolio contains selected projects I completed during my undergraduate studies. 2018 - 2023
Immunizing Image Classifiers Against Localized Adversary Attacks
This paper addresses the vulnerability of deep learning models, particularly convolutional neural networks
(CNN)s, to adversarial attacks and presents a proactive training technique designed to counter them. We
introduce a novel volumization algorithm, which transforms 2D images into 3D volumetric representations.
When combined with 3D convolution and deep curriculum learning optimization (CLO), itsignificantly improves
the immunity of models against localized universal attacks by up to 40%. We evaluate our proposed approach
using contemporary CNN architectures and the modified Canadian Institute for Advanced Research (CIFAR-10
and CIFAR-100) and ImageNet Large Scale Visual Recognition Challenge (ILSVRC12) datasets, showcasing
accuracy improvements over previous techniques. The results indicate that the combination of the volumetric
input and curriculum learning holds significant promise for mitigating adversarial attacks without necessitating
adversary training.
Standard Reomte Control Interface - Neometrix
About
Indigenized remote control interface card suitable for MAFI system CCR equipment. Compatible for IDM8000 CCR. Backplane mounted serial and TCP/Ethernet communication module for CCR remote access. IDM 8000 CCR remote control on serial and TCP protocol.
• Remote control: Parallel or serial interface.
• Compatible with MAFI CCR system.
• Compatible with IDM8000 CCR.
• Compatible with Backplane mount serial communication.
• Compatible with commercial and Defence aviation CCR system.
• Remote control system for accessing CCR and allied system over serial or TCP.
• Indigenized local Support/presence in India.
• Easy in configuration using DIP switches.
Technical Specifications
Indigenized remote control interface card suitable for MAFI system CCR equipment. Compatible for IDM8000 CCR. Backplane mounted serial and TCP/Ethernet communication module for CCR remote access. IDM 8000 CCR remote control on serial and TCP protocol.
Key Features
Indigenized remote control interface card suitable for MAFI system CCR equipment. Compatible for IDM8000 CCR. Backplane mounted serial and TCP/Ethernet communication module for CCR remote access. IDM 8000 CCR remote control on serial and TCP protocol.
• Remote control: Parallel or serial interface
• Compatible with MAFI CCR system
• Copatiable with IDM8000 CCR
• Compatible with Backplane mount serial communication.
• Compatible with commercial and Defence aviation CCR system.
• Remote control system for accessing CCR and allied system over serial or TCP.
• Indigenized local Support/presence in India.
Application
• Remote control: Parallel or serial interface.
• Compatible with MAFI CCR system.
• Compatible with IDM8000 CCR.
• Compatible with Backplane mount serial communication.
• Compatible with commercial and Defence aviation CCR system.
• Remote control system for accessing CCR and allied system over serial or TCP.
• Indigenized local Support/presence in India.
• Easy in configuration using DIP switches.
Final project report on grocery store management system..pdf
In today’s fast-changing business environment, it’s extremely important to be able to respond to client needs in the most effective and timely manner. If your customers wish to see your business online and have instant access to your products or services.
Online Grocery Store is an e-commerce website, which retails various grocery products. This project allows viewing various products available enables registered users to purchase desired products instantly using Paytm, UPI payment processor (Instant Pay) and also can place order by using Cash on Delivery (Pay Later) option. This project provides an easy access to Administrators and Managers to view orders placed using Pay Later and Instant Pay options.
In order to develop an e-commerce website, a number of Technologies must be studied and understood. These include multi-tiered architecture, server and client-side scripting techniques, implementation technologies, programming language (such as PHP, HTML, CSS, JavaScript) and MySQL relational databases. This is a project with the objective to develop a basic website where a consumer is provided with a shopping cart website and also to know about the technologies used to develop such a website.
This document will discuss each of the underlying technologies to create and implement an e- commerce website.
RAT: Retrieval Augmented Thoughts Elicit Context-Aware Reasoning in Long-Hori...
RAT: Retrieval Augmented Thoughts Elicit Context-Aware Reasoning in Long-Horizon Generation
CFD Simulation of By-pass Flow in a HRSG module by R&R Consult.pptx
CFD analysis is incredibly effective at solving mysteries and improving the performance of complex systems!
Here's a great example: At a large natural gas-fired power plant, where they use waste heat to generate steam and energy, they were puzzled that their boiler wasn't producing as much steam as expected.
R&R and Tetra Engineering Group Inc. were asked to solve the issue with reduced steam production.
An inspection had shown that a significant amount of hot flue gas was bypassing the boiler tubes, where the heat was supposed to be transferred.
R&R Consult conducted a CFD analysis, which revealed that 6.3% of the flue gas was bypassing the boiler tubes without transferring heat. The analysis also showed that the flue gas was instead being directed along the sides of the boiler and between the modules that were supposed to capture the heat. This was the cause of the reduced performance.
Based on our results, Tetra Engineering installed covering plates to reduce the bypass flow. This improved the boiler's performance and increased electricity production.
It is always satisfying when we can help solve complex challenges like this. Do your systems also need a check-up or optimization? Give us a call!
Work done in cooperation with James Malloy and David Moelling from Tetra Engineering.
More examples of our work https://www.r-r-consult.dk/en/cases-en/
Recently uploaded (20)
Water Industry Process Automation and Control Monthly - May 2024.pdf
Water Industry Process Automation and Control Monthly - May 2024.pdf
The Benefits and Techniques of Trenchless Pipe Repair.pdf
The Benefits and Techniques of Trenchless Pipe Repair.pdf
Planning Of Procurement o different goods and services
Planning Of Procurement o different goods and services
Fundamentals of Electric Drives and its applications.pptx
Fundamentals of Electric Drives and its applications.pptx
MCQ Soil mechanics questions (Soil shear strength).pdf
MCQ Soil mechanics questions (Soil shear strength).pdf
Industrial Training at Shahjalal Fertilizer Company Limited (SFCL)
Industrial Training at Shahjalal Fertilizer Company Limited (SFCL)
Design and Analysis of Algorithms-DP,Backtracking,Graphs,B&B
Design and Analysis of Algorithms-DP,Backtracking,Graphs,B&B
Immunizing Image Classifiers Against Localized Adversary Attacks
Immunizing Image Classifiers Against Localized Adversary Attacks
block diagram and signal flow graph representation
block diagram and signal flow graph representation
Final project report on grocery store management system..pdf
Final project report on grocery store management system..pdf
RAT: Retrieval Augmented Thoughts Elicit Context-Aware Reasoning in Long-Hori...
RAT: Retrieval Augmented Thoughts Elicit Context-Aware Reasoning in Long-Hori...
CFD Simulation of By-pass Flow in a HRSG module by R&R Consult.pptx
CFD Simulation of By-pass Flow in a HRSG module by R&R Consult.pptx
Progress report for research paper
- 1. Progress Report Introduction A robot interacts with multiple objects while working in a particular environment. To perform particular task robots interacts with themselves or other objects. In uncertain environments the robots may have to encounter with unknown objects those may appear in its surroundings. The robots should be aware of the semantics and positions of the objects in its surrounding so that hitting other objects or themselves or any wrong doing can be avoided Task switching factors and usage statistics 28% 20% 16% 12% 24% Task switching factors Cognitive intelligence path Configuration Visibility Mixed
- 2. In the review we have discussed about task switching. Depending upon the nature of task like static and dynamic different frame works have been analyzed. When autonomous robots switch from one task to other, the task switching criterias like time, path, visibility, configuration etc are taken into consideration. Task regrouping helps in accomplishing the task easily with less time and cost. Multi tasking done by a single robot and by a group of robots are also analyzed. Multi tasking in uncertain environment is discussed and we have also reviewed the natural language interfaces to robots and cognitive message exchange. Multi tasking with cognitive intelligence of robots have been studied and application of natural language, human facial emotion and body gesture analysis have been done while multi tasking. Different types of robots like service robots, industrial robots, under water and aerial robots have been discussed as case studies for multi tasking. This review guarantees the following findings about task switching applying cognitive capabilities in a multi object and multi tasking environment. It is evident that the robots learn to predict future tasks and actions in uncertain dynamic environments. Robots are trained about the semantics of the environments and can predict and manipulate dynamic objects those interfere in their work environment. This helps the robots to avoid hitting themselves or other objects