Download as PDF, PPTX













The document provides an overview of robotics, including the history, types, applications, advantages, and disadvantages of robots. It highlights the role of artificial intelligence in robotics, the various components of robots, and their impact on industries and society. The conclusion emphasizes the potential future developments in robotics, including the possibility of super-human robots and their applications in various fields.
Introduction to the topic of communication technology and robotics, the agenda is outlined.
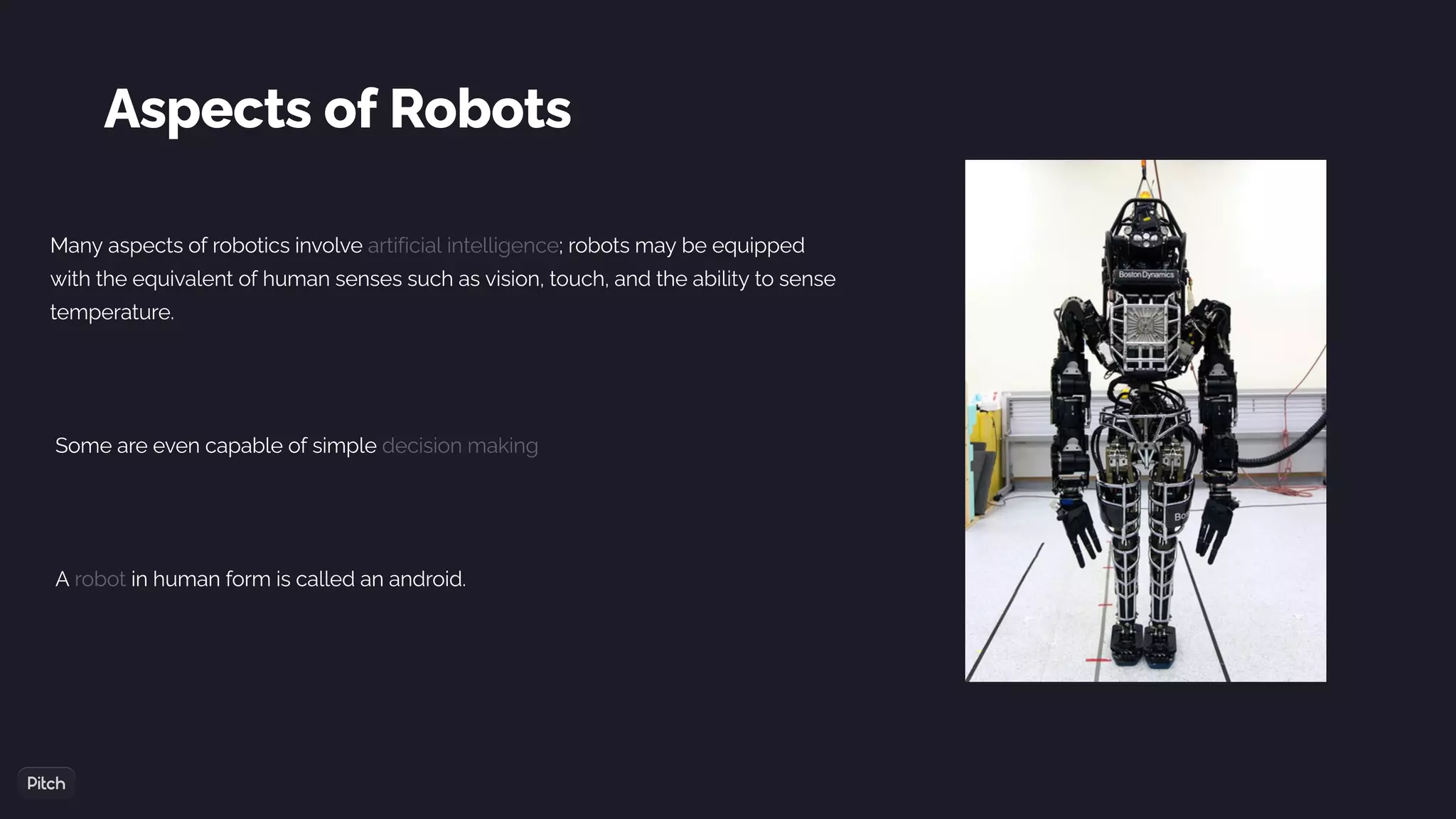
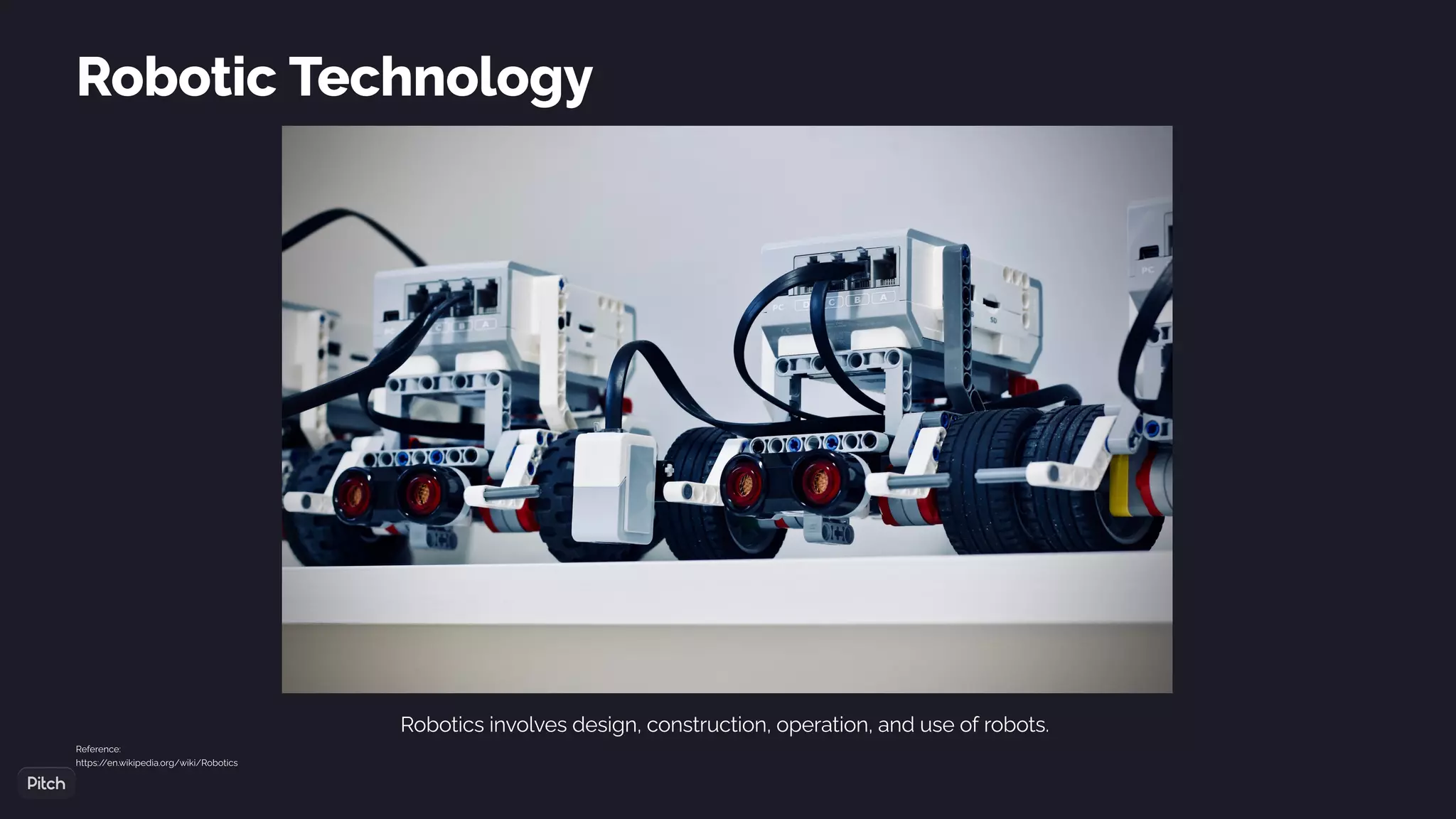
Robotics involves the generation of computer-controlled motions; AI plays a crucial role in robots, enhancing their capabilities.
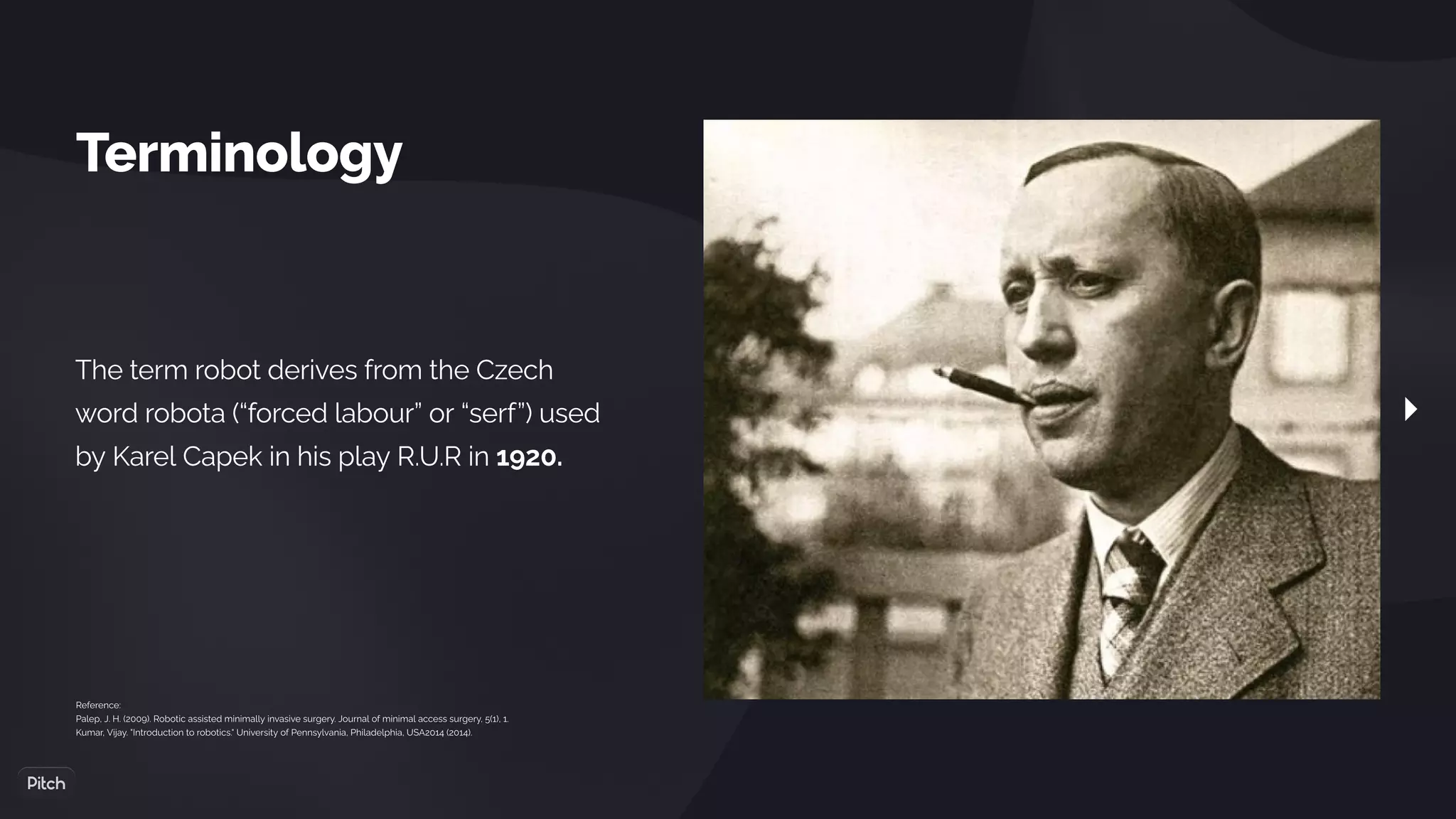
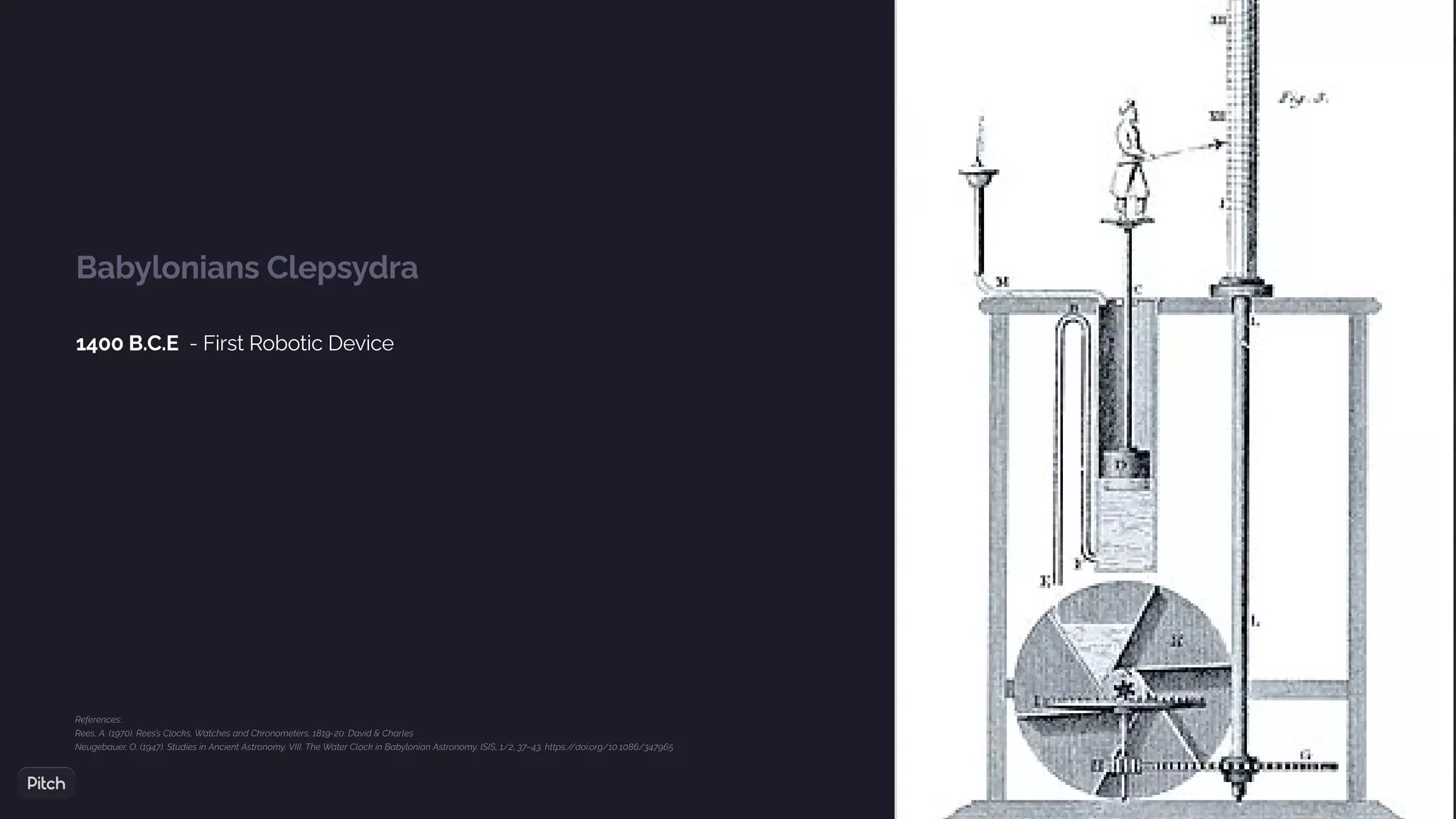
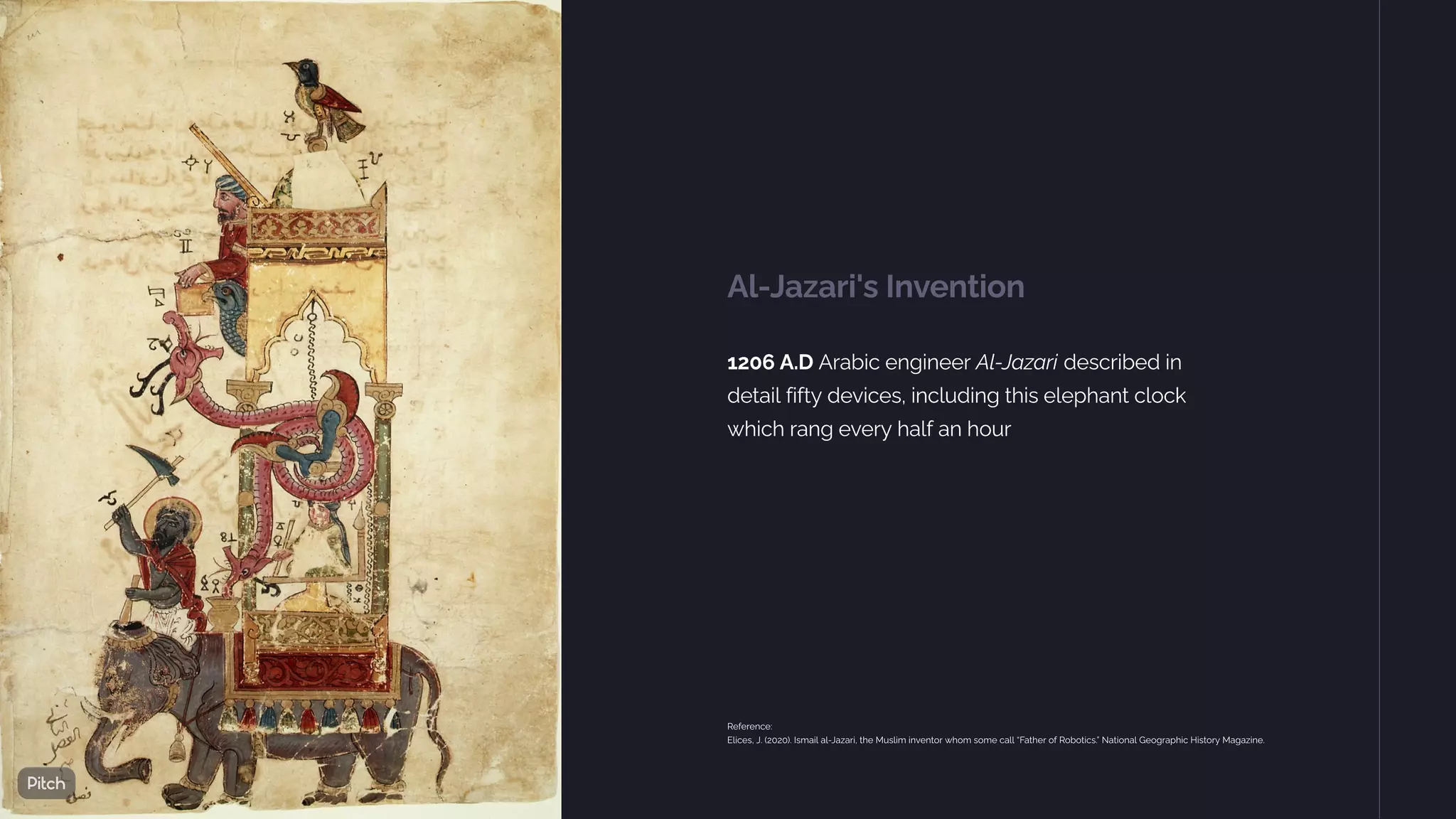
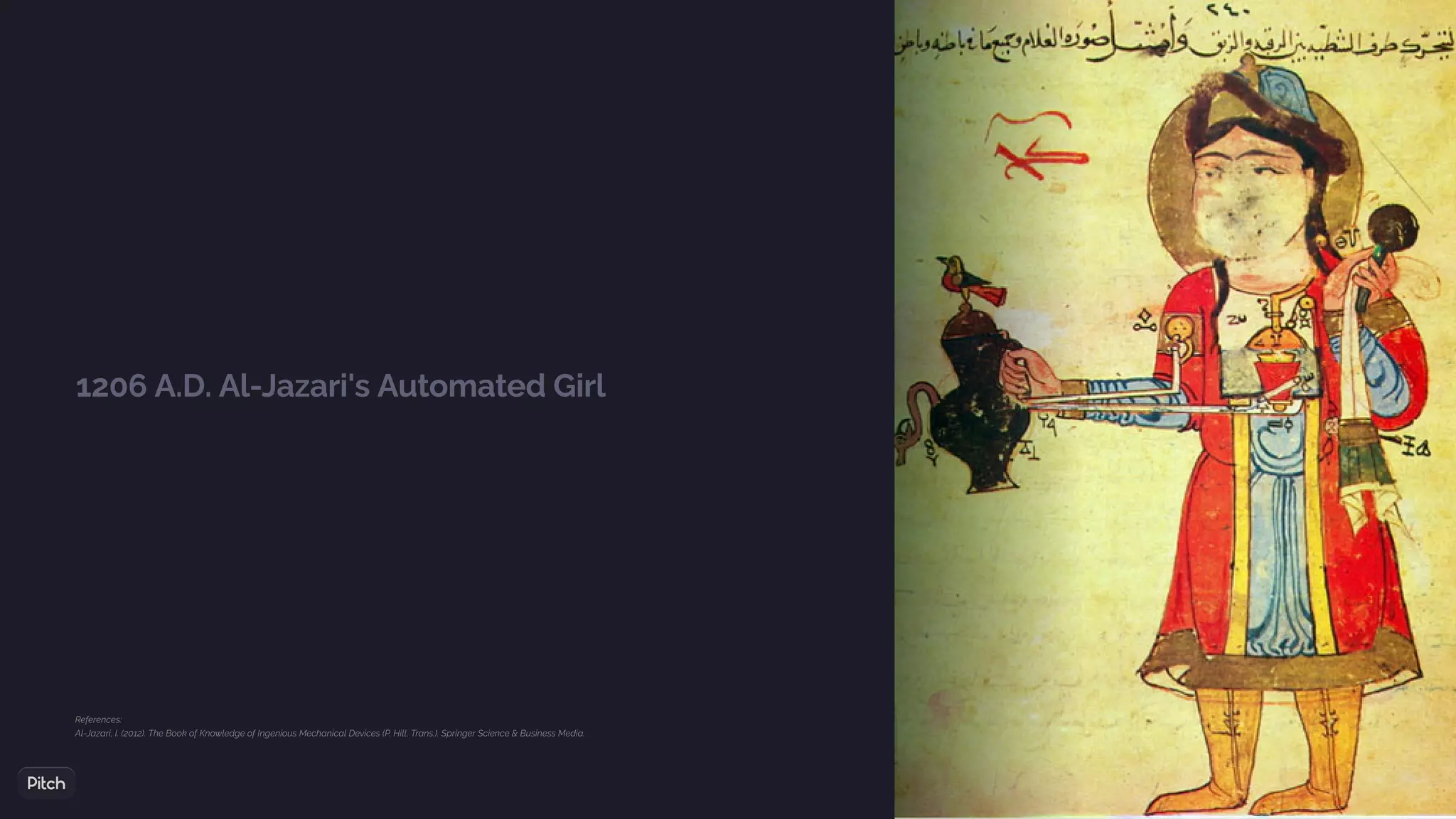
Exploration of the historical context and early concepts of robots, including notable inventions from ancient civilizations.
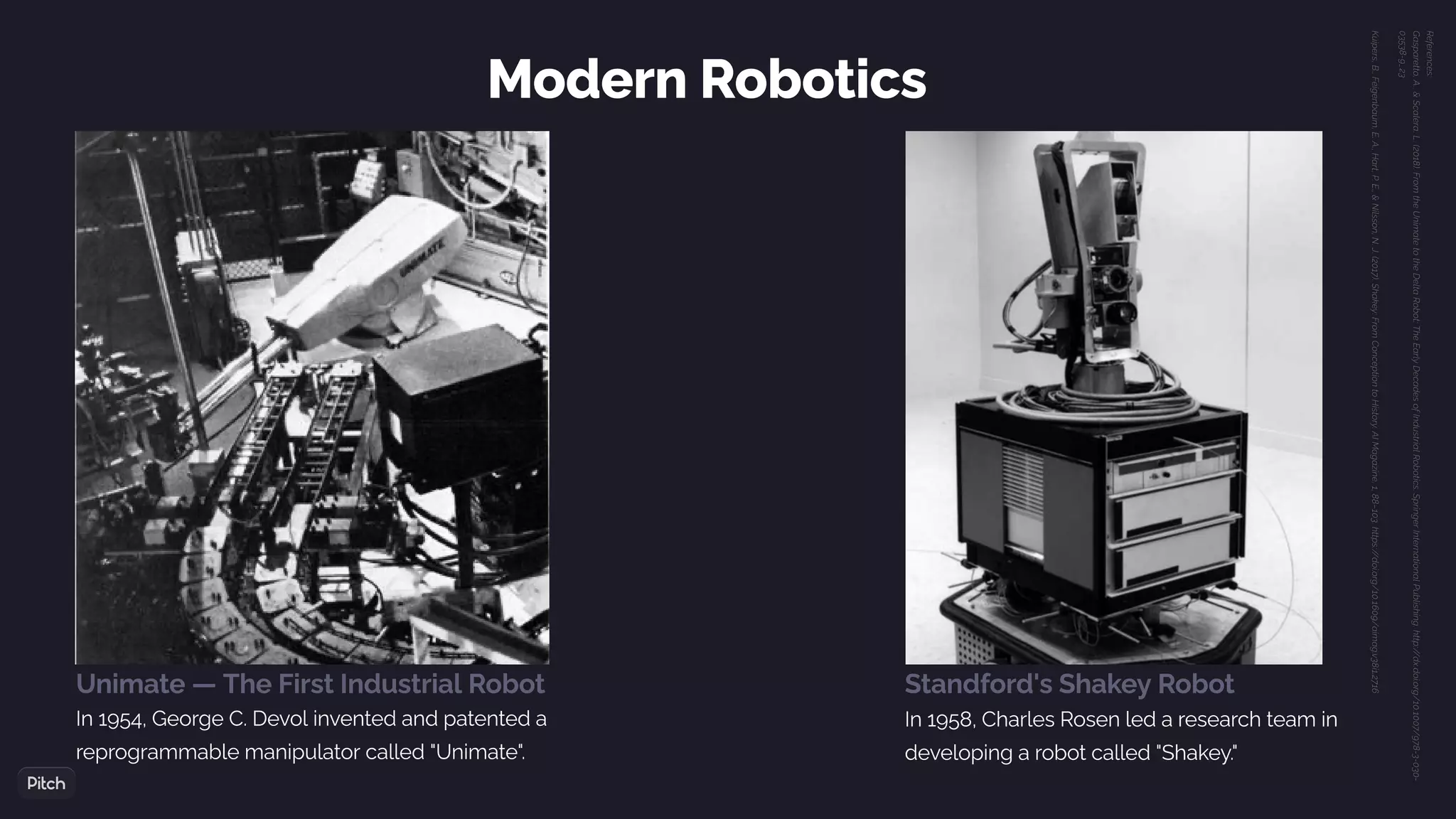
Introduction of key advancements such as Unimate and Stanford's Shakey robot, marking significant strides in robotic technology.
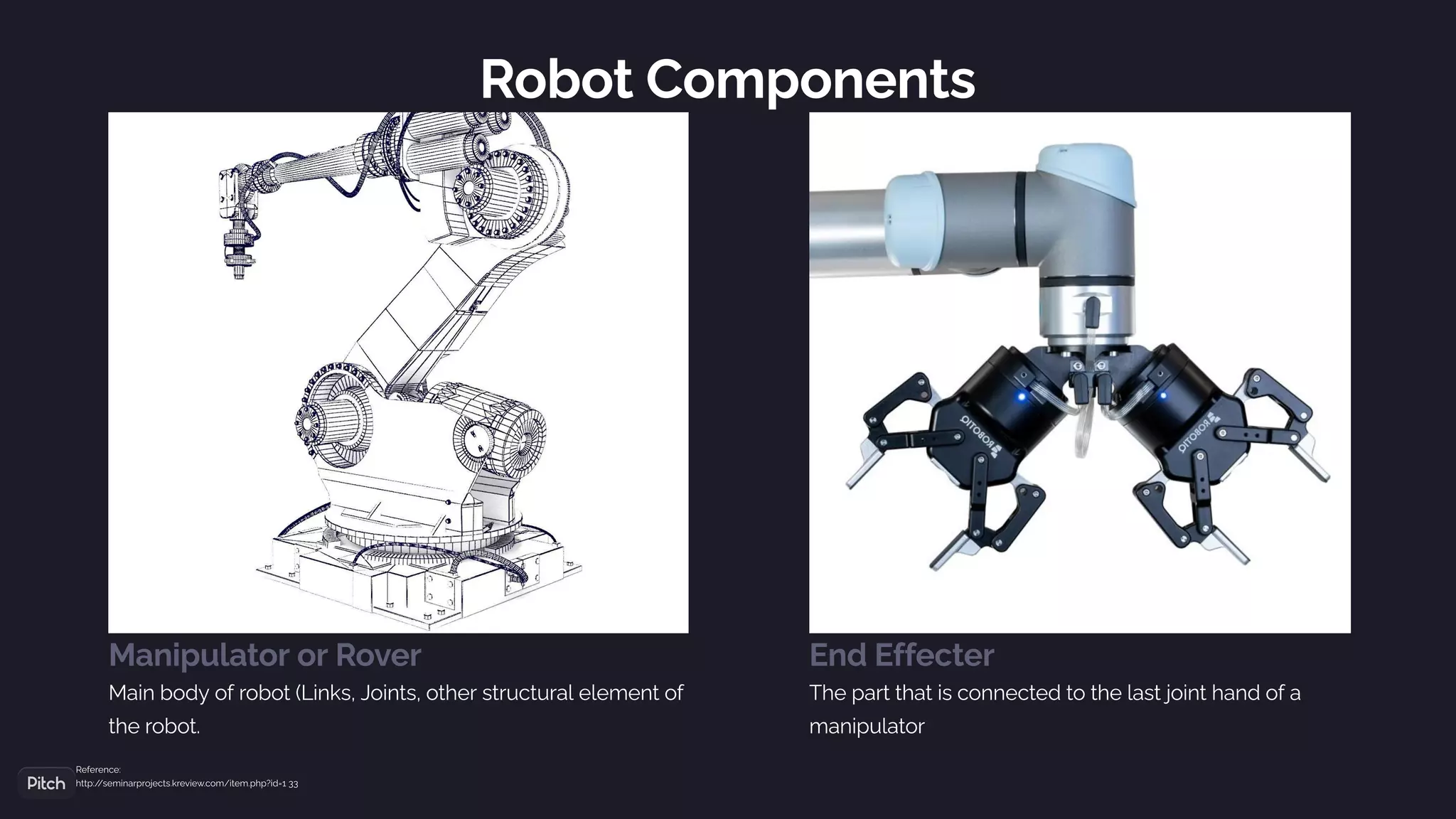
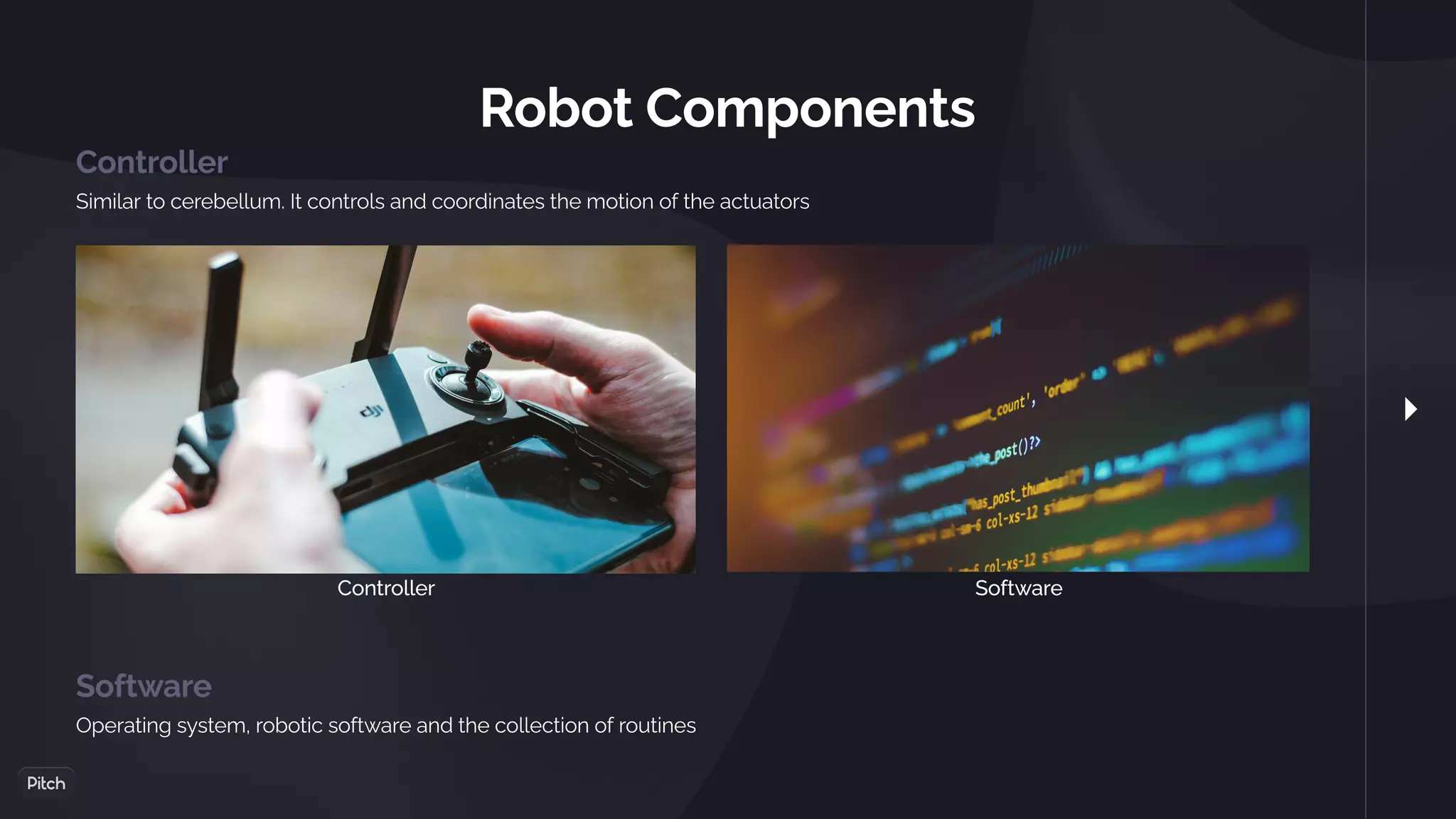
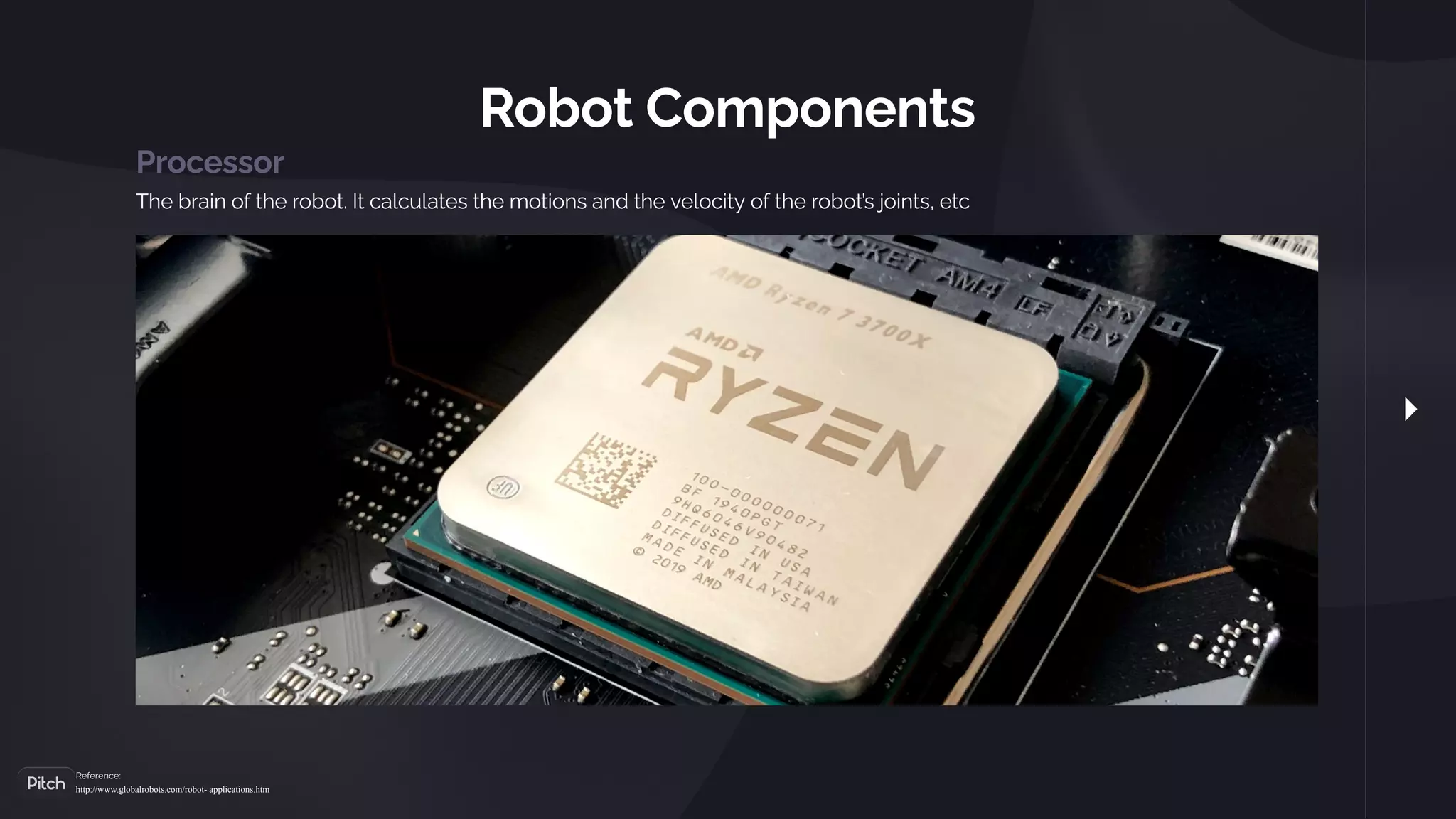
Details on various robot components including manipulators, actuators, sensors, controllers, and processors essential for robotic functions.
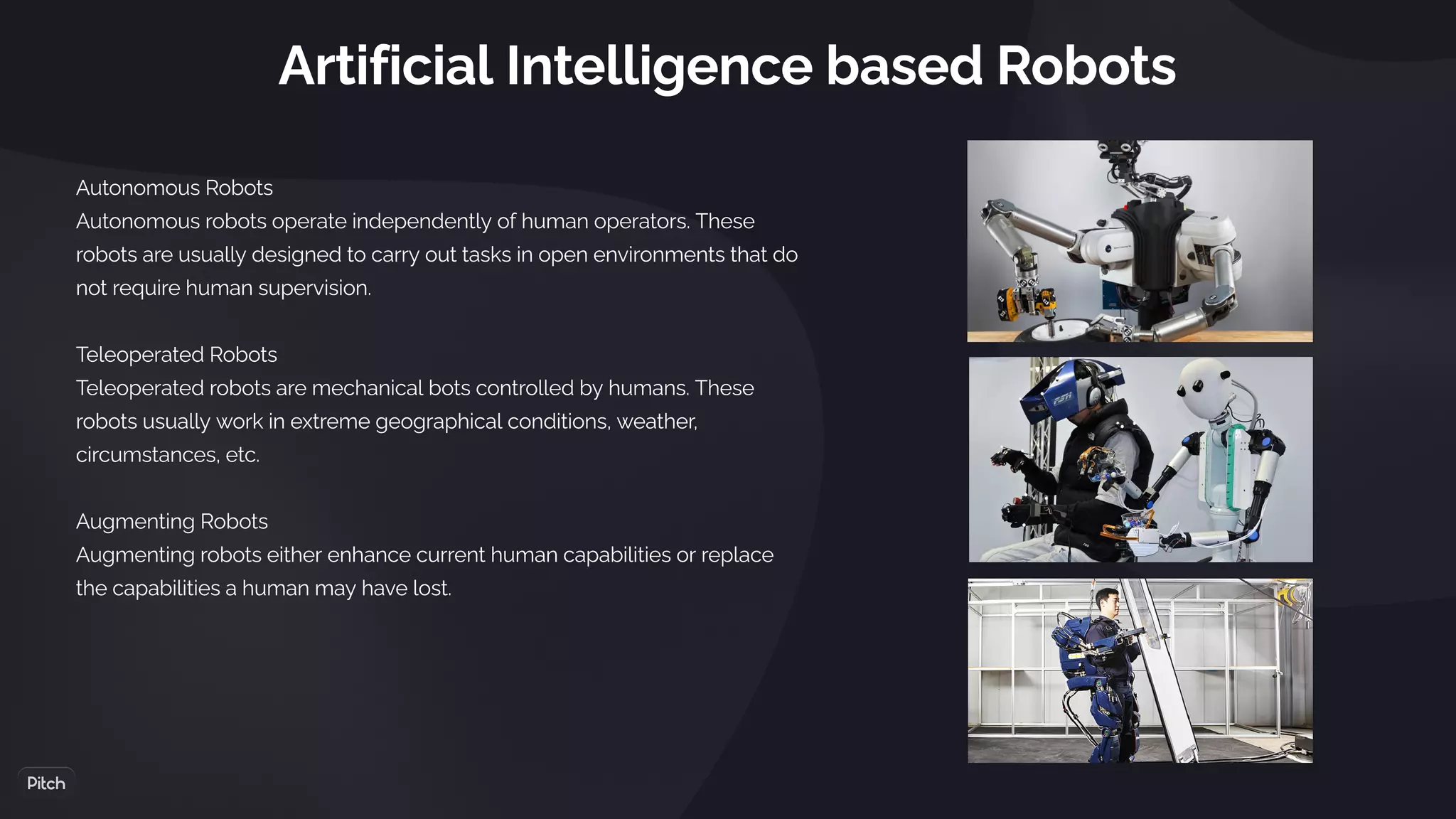
Discussion on Isaac Asimov's Laws of Robotics and different types of robots including AI-based, pre-programmed, humanoid, and autonomous.
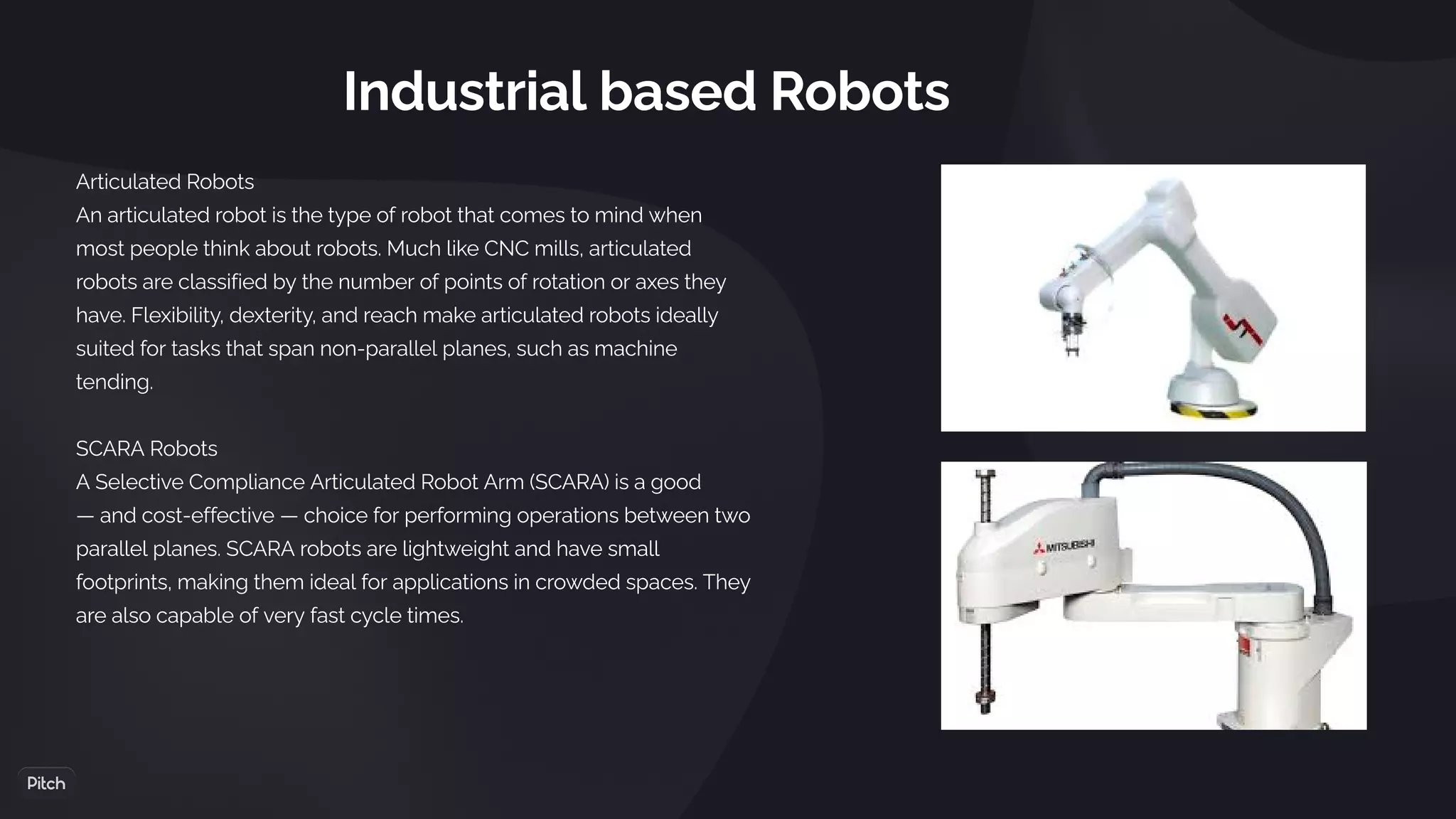
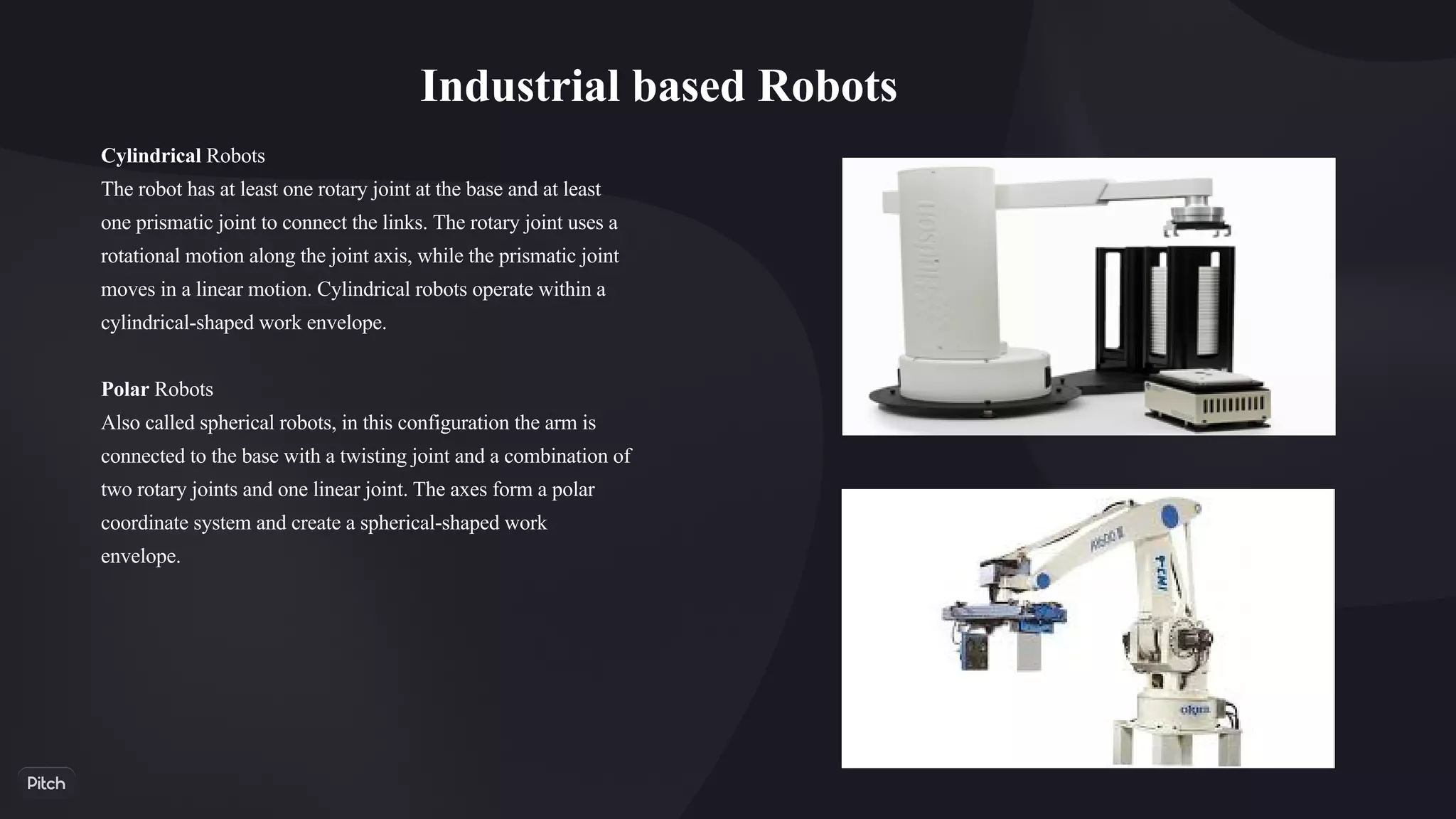
Exploration of industrial robots, their types, and various applications such as welding, materials handling, and painting.
Benefits include increased efficiency and productivity, longer working hours, improved quality, and better safety in hazardous environments.
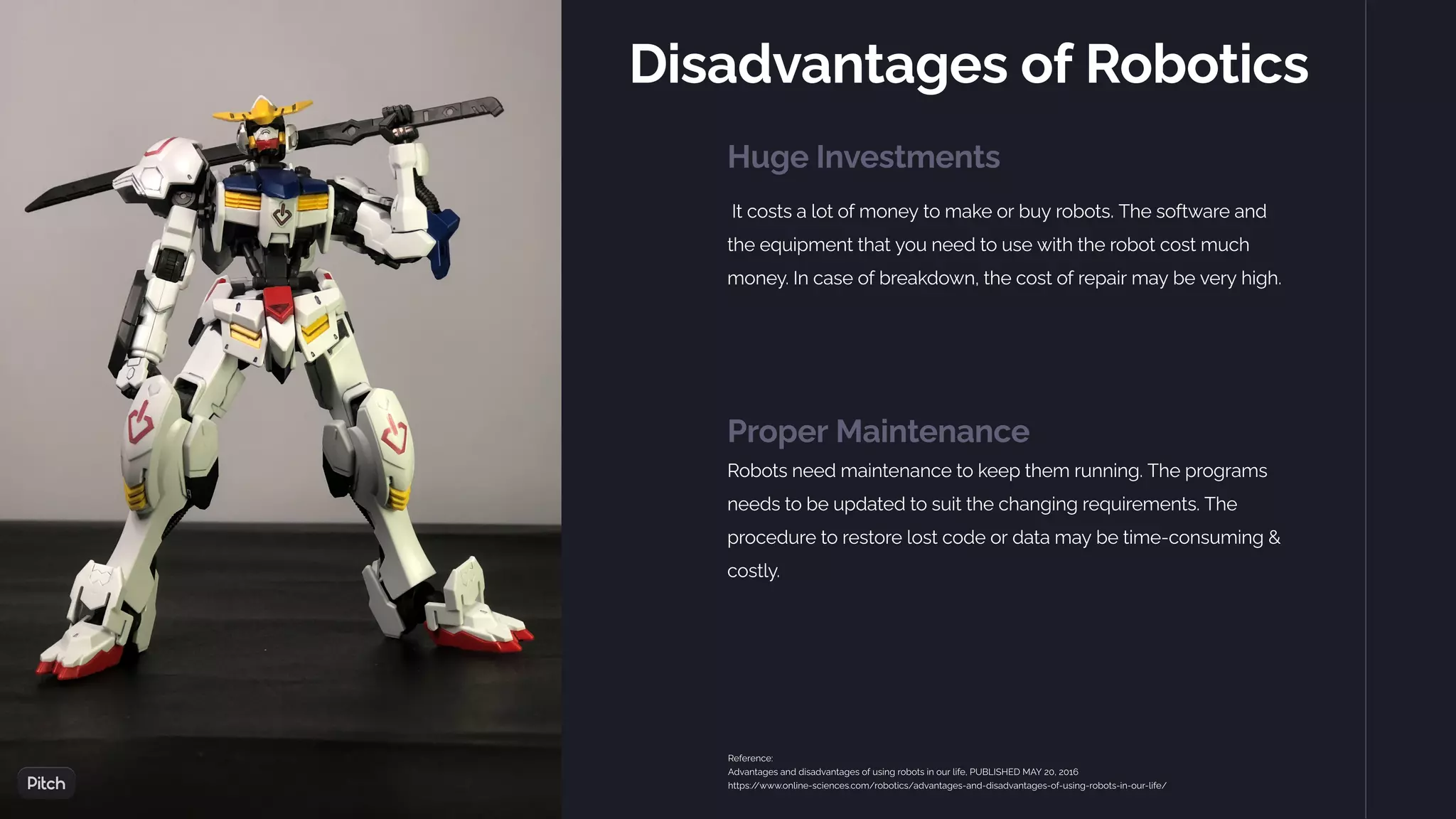
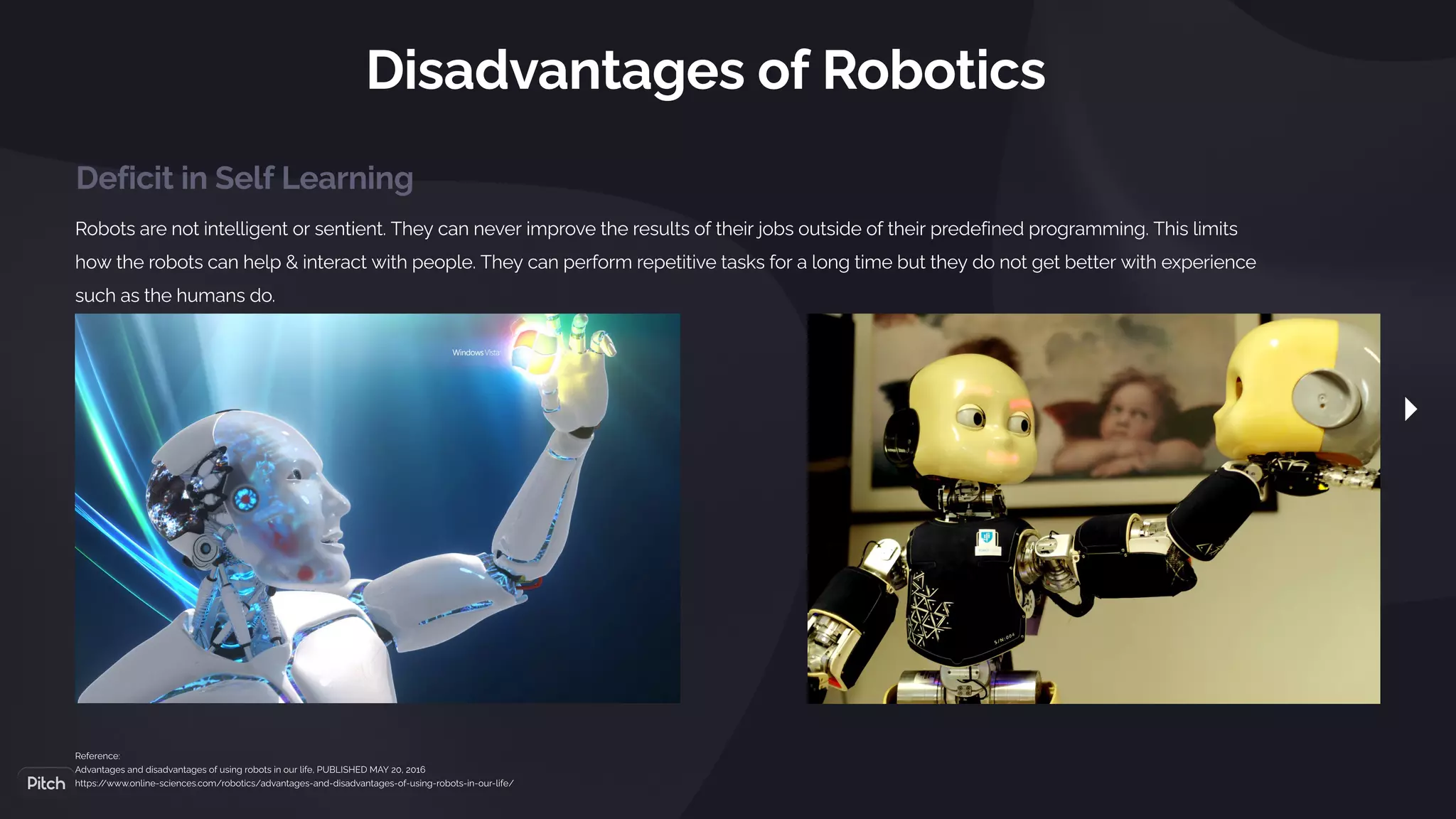
Challenges presented by robotics like high costs, maintenance needs, job replacement concerns, and reliability issues.
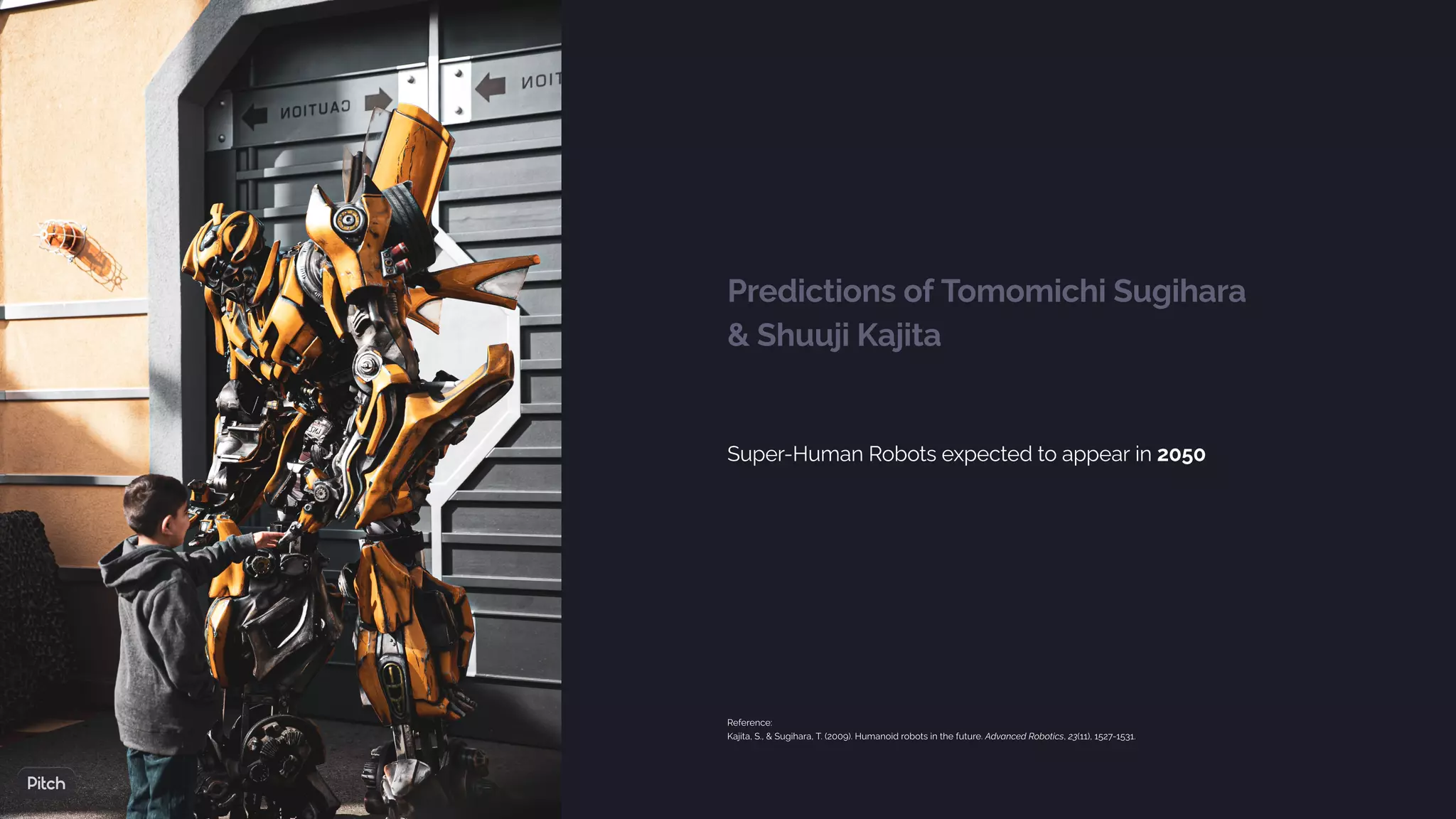
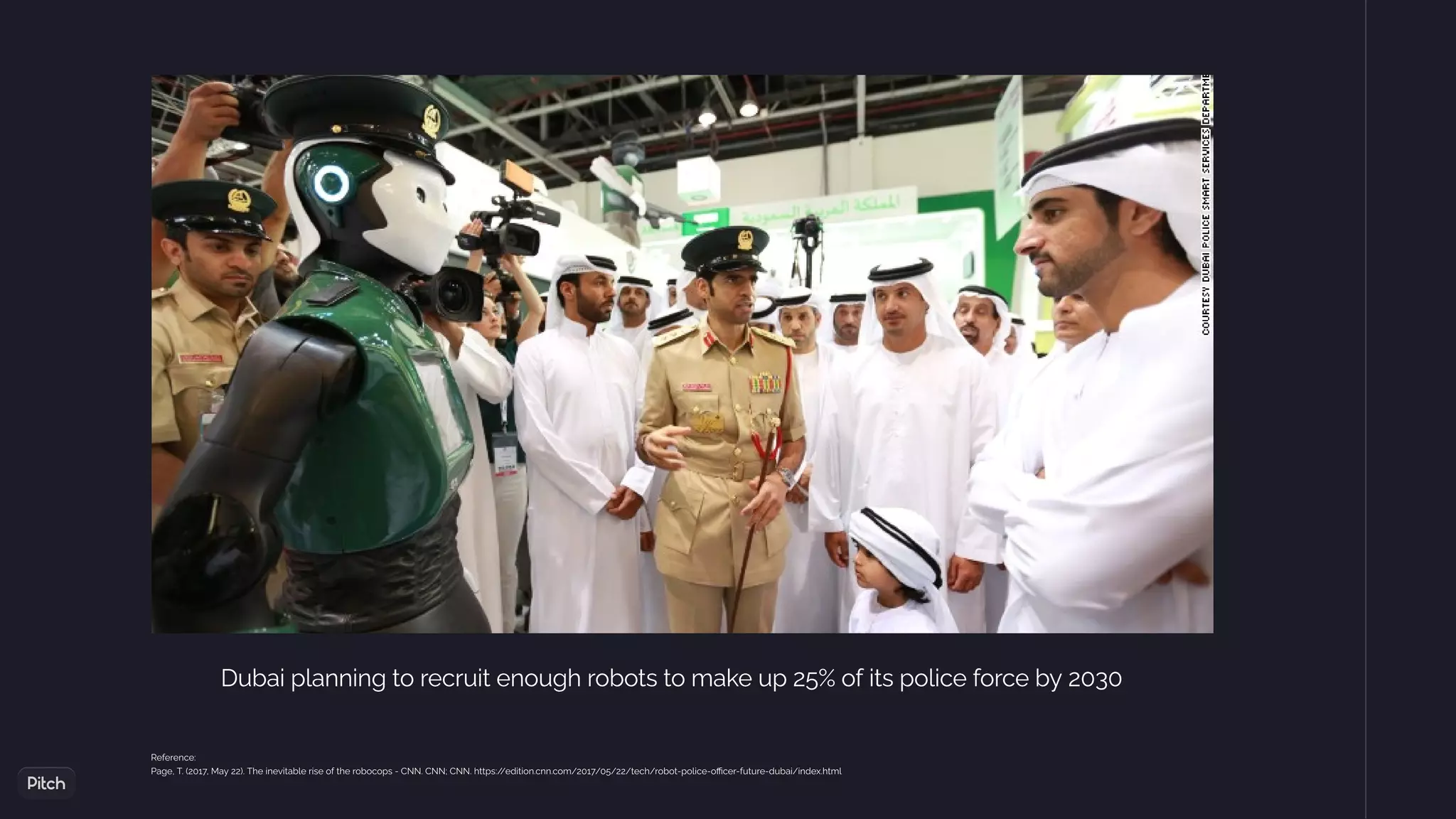
Predictions about super-human robots, advancements in health and policing, and ongoing developments in robotic technology.
Summary of robotics' significance and its potential along with an invitation for questions and interactions.




















































![Vibe Coding vs. Spec-Driven Development [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/vibecodingvsspecdrivendevelopment-251209105622-43f455e7-thumbnail.jpg?width=640&height=640&fit=bounds)











