Download to read offline
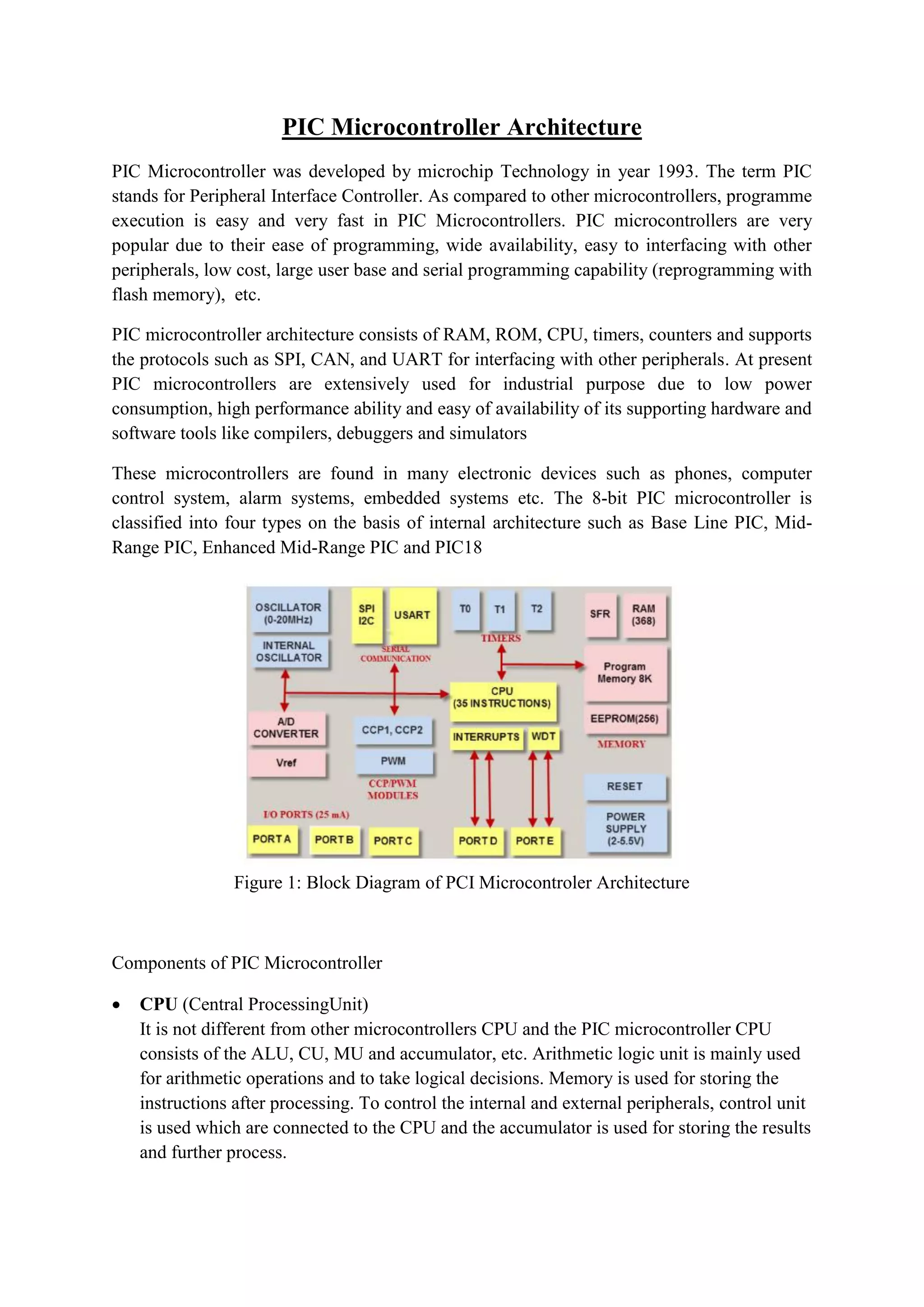
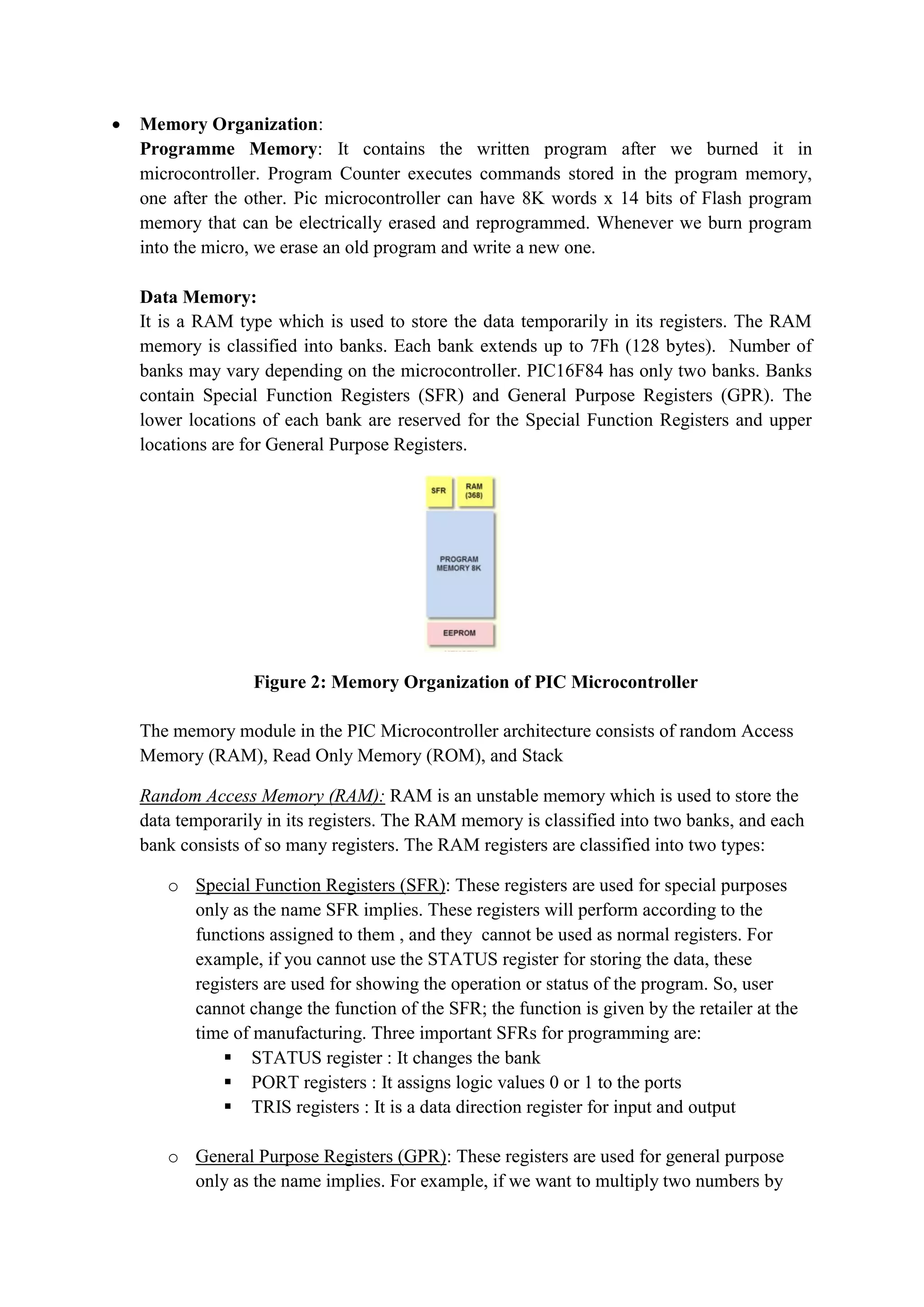

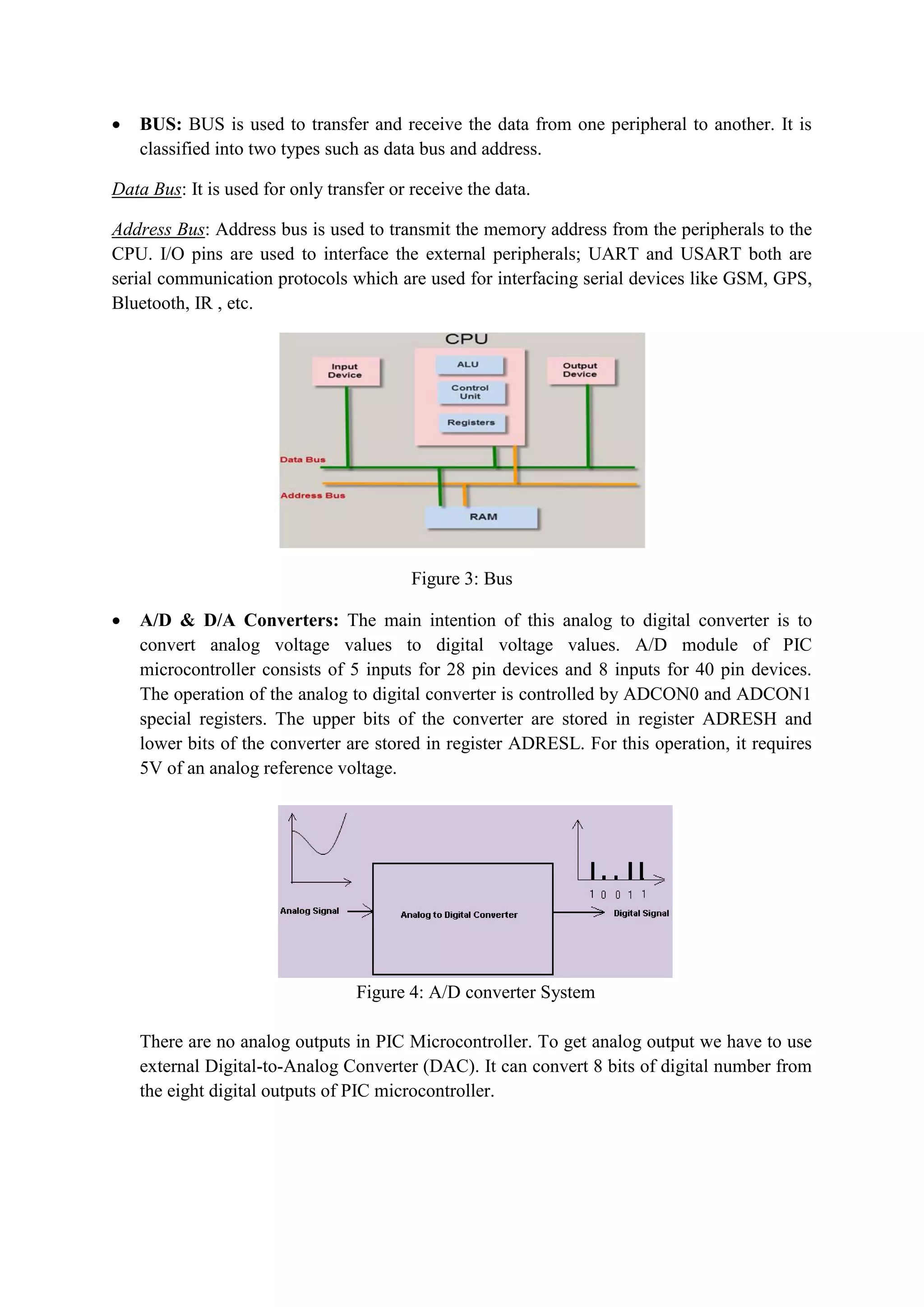
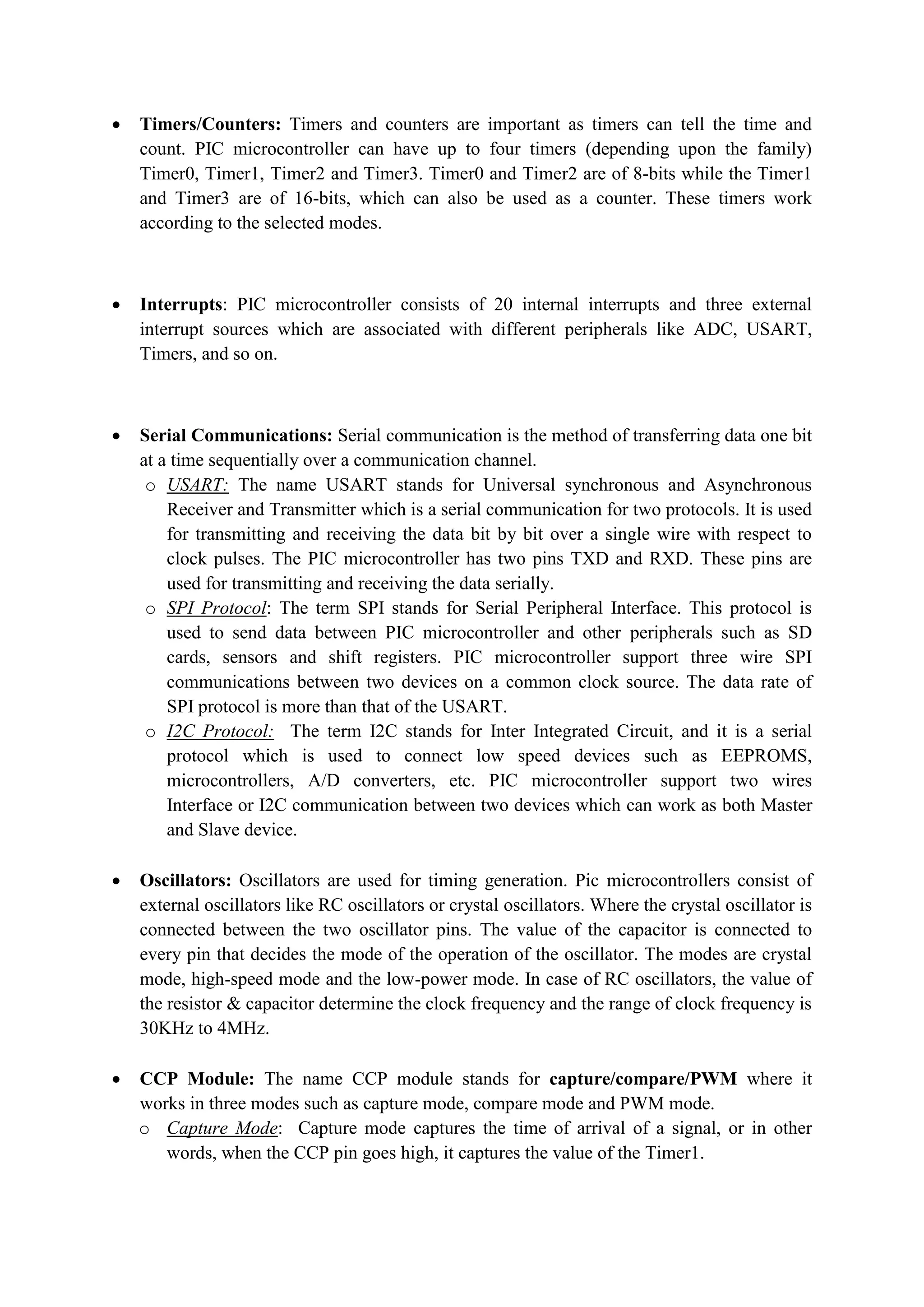

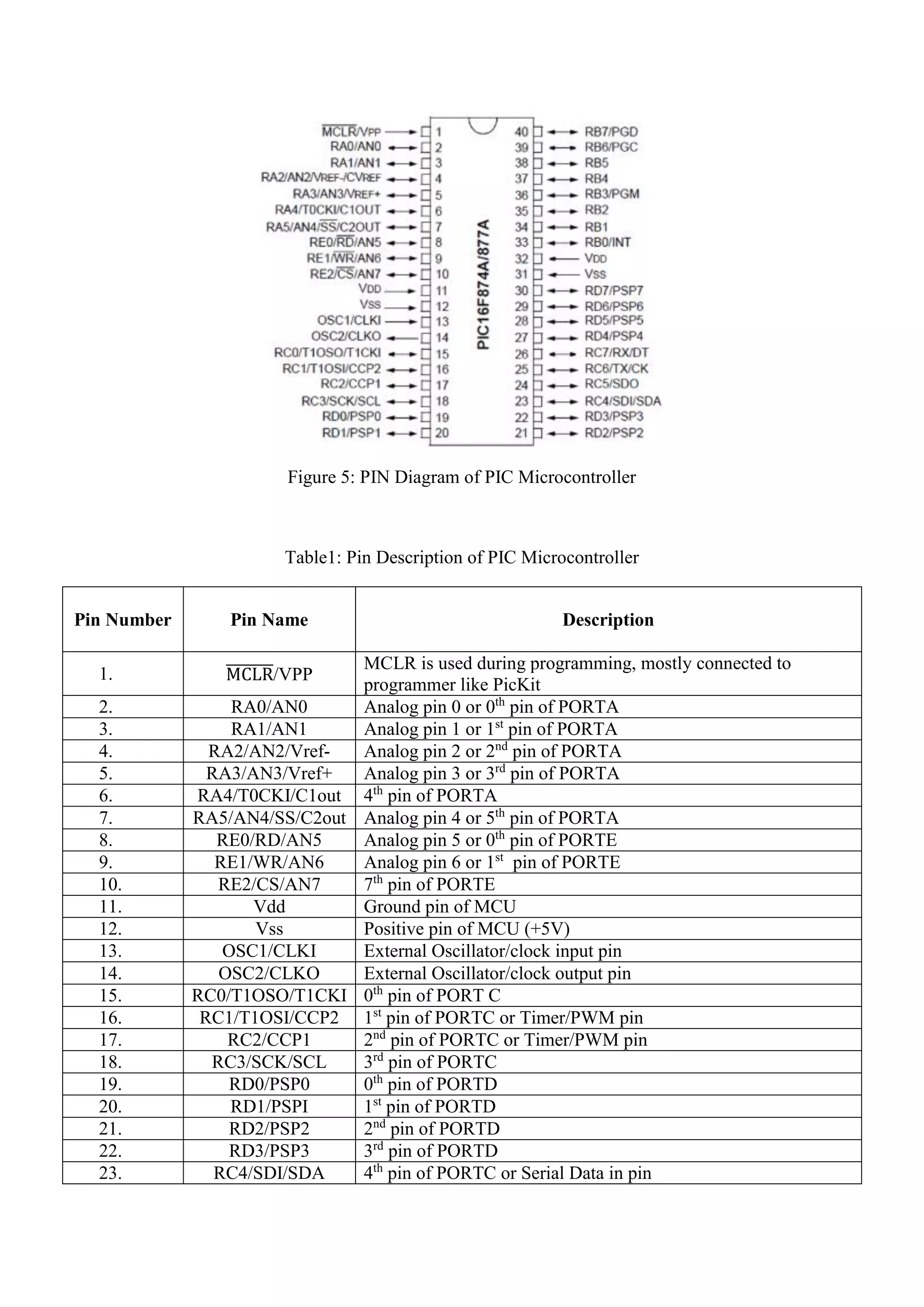
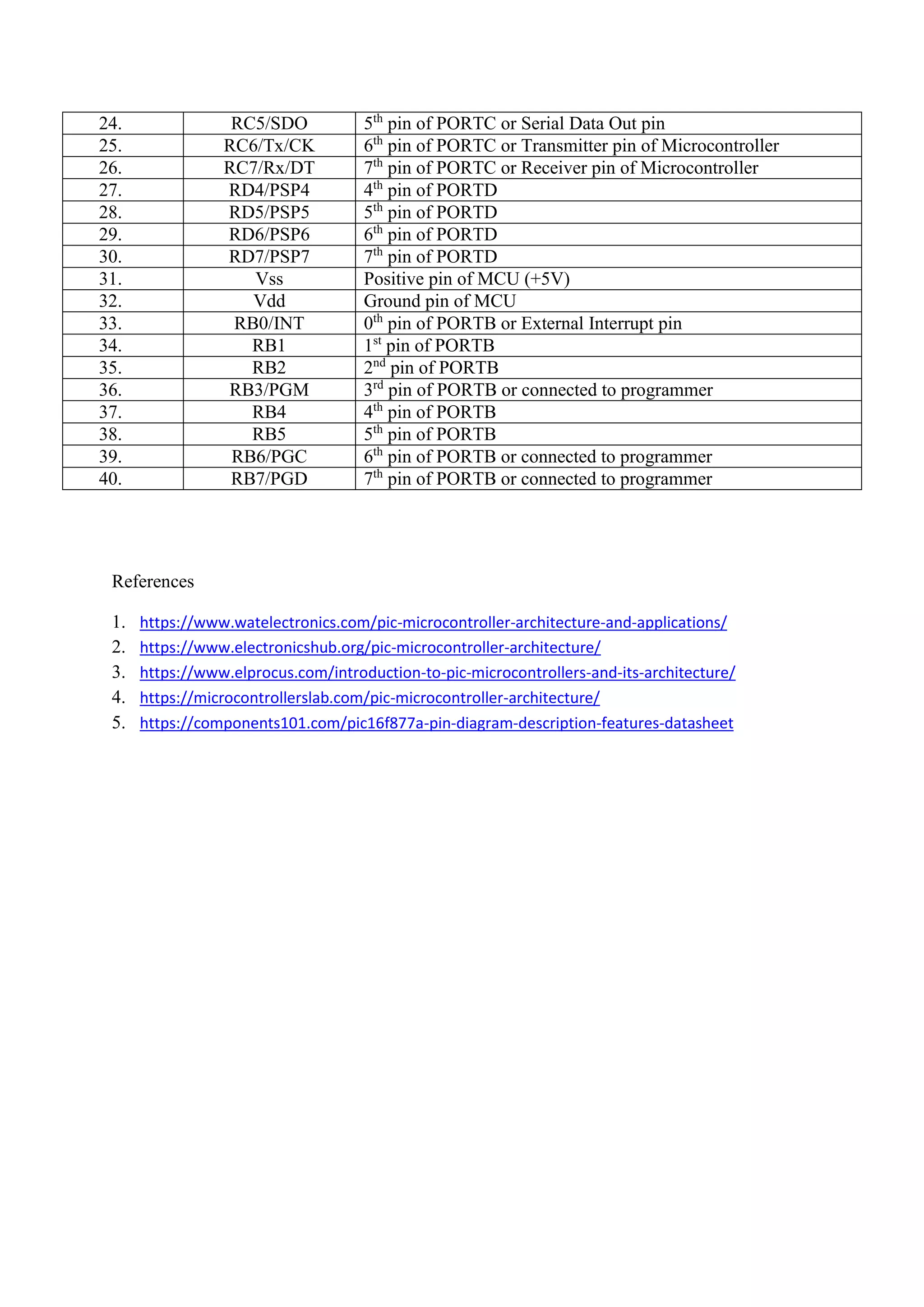

The document provides an in-depth overview of the PIC microcontroller architecture, developed by Microchip Technology in 1993, highlighting its fast program execution, low cost, and ease of interfacing with peripherals. It describes key components such as the CPU, memory organization, I/O ports, and communication protocols, as well as expands on features like timers, counters, and interrupts. Additionally, it details the types of memory used, including flash and EEPROM, and lists the various applications of PIC microcontrollers in electronic devices.


























![Interfacing technique with 8085- ADC[0808]](https://cdn.slidesharecdn.com/ss_thumbnails/adc-160307140900-thumbnail.jpg?width=640&height=640&fit=bounds)







![Pic microcontroller [autosaved] [autosaved]](https://cdn.slidesharecdn.com/ss_thumbnails/picmicrocontrollerautosavedautosaved-120427093459-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)







































