The document summarizes algorithms for learning first-order logic rules from examples, including:
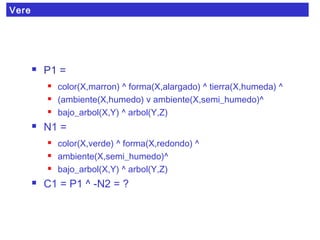
1) A sequential covering algorithm that learns one rule at a time to cover examples, removing covered examples and repeating until all examples are covered or rules have low performance.
2) The learn-one-rule sub-algorithm uses a decision tree-like approach to greedily select the attribute that best splits examples according to a performance metric.
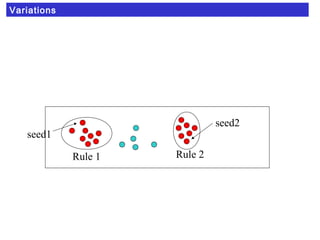
3) Variations include allowing low probability classes and using a seed example approach instead of removing covered examples between rules.











![STAR (Michalsky)
venenoso(X) <- color(X,
[marron,verde])
forma(X,alargado)
tierra(X,humeda)
bajo_arbol(X,Y) arbol(Y,
[fresno,laurel])
venenoso(X) <- color(X,
[marron,verde])
forma(X,alargado)
tierra(X,humeda)
bajo_arbol(X,Y) arbol(Y,
[fresno,laurel])
venenoso(X) <-
forma(X,alargado)
tierra(X,humeda)
ambiente(X,humedo)
venenoso(X) <-
forma(X,alargado)
tierra(X,humeda)
ambiente(X,humedo)
venenoso(X) <-
color(X,marron)
forma(X,alargado)
tierra(X,humeda)
ambiente(X,humedo)
bajo_arbol(X,Y) arbol(Y,Z)
venenoso(X) <-
color(X,marron)
forma(X,alargado)
tierra(X,humeda)
ambiente(X,humedo)
bajo_arbol(X,Y) arbol(Y,Z)](https://image.slidesharecdn.com/poggi-analytics-star-1a-160719004324/85/Poggi-analytics-star-1a-12-320.jpg)

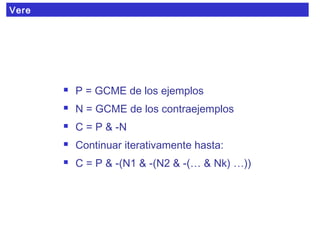
![Vere
C1 = P1 ^ -N2 =
color(X,marron) ^ forma(X,alargado) ^ tierra(X,humeda) ^
(ambiente(X,humedo) v ambiente(X,semi_humedo)^
bajo_arbol(X,Y) ^ arbol(Y,Z) ^
- [ color(X,verde) ^ forma(X,redondo) ^
ambiente(X,semi_humedo) ^
bajo_arbol(X,Y) ^ arbol(Y,Z) ]
=
color(X,marron) ^ forma(X,alargado) ^ tierra(X,humeda) ^
(ambiente(X,humedo) v ambiente(X,semi_humedo) ^
bajo_arbol(X,Y) ^ arbol(Y,Z) ^
-color(X,verde) ^ -forma(X,redondo) ^
-ambiente(X,semi_humedo) ^
- bajo_arbol(X,Y) ^ - arbol(Y,Z)](https://image.slidesharecdn.com/poggi-analytics-star-1a-160719004324/85/Poggi-analytics-star-1a-17-320.jpg)














































![[YMC] Nội san Sức trẻ số 35](https://cdn.slidesharecdn.com/ss_thumbnails/s-e1-bb-a9c-tre-35-130518002311-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)



































































