Download to read offline
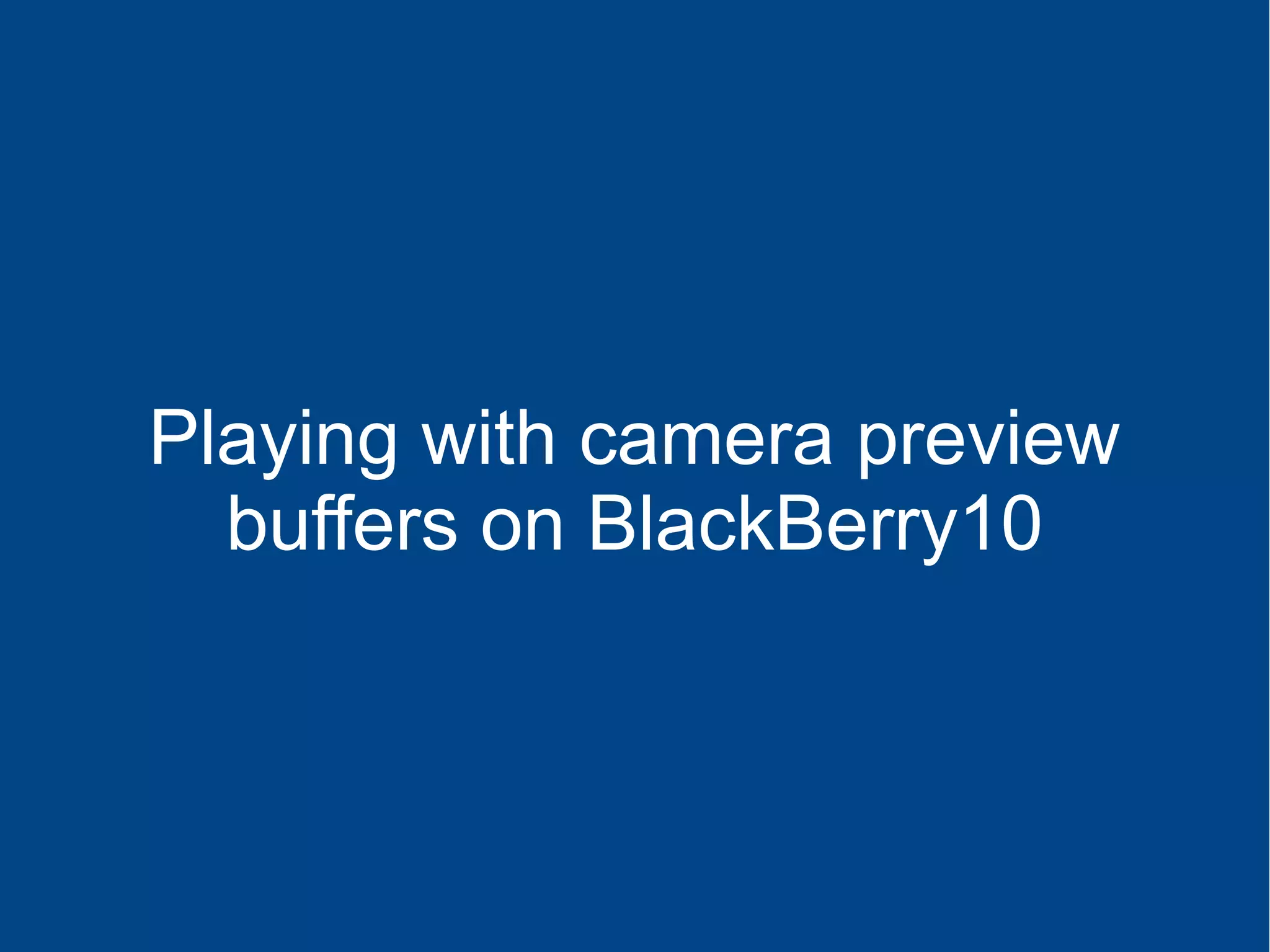







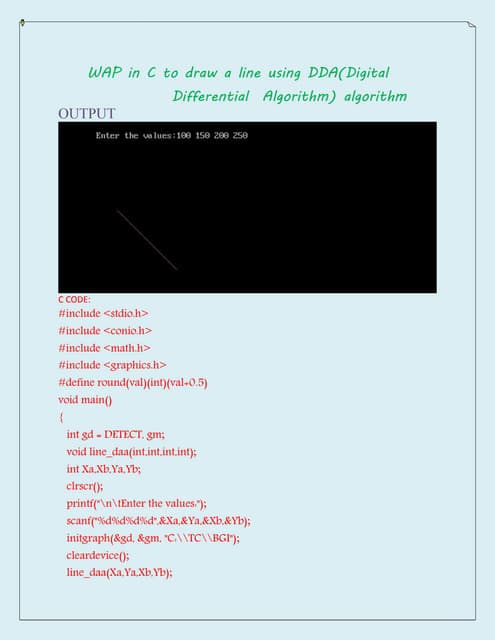
![quint64 size = cam->previewBufferSize();
for(int i = 0; i < N_BUFS; i++)
{
buf[i] = malloc(size * sizeof(char));
QSharedPointer<unsigned char>b (buf[i]);
cam->addPreviewBuffer(b, size);
}](https://image.slidesharecdn.com/201410mobiconfbb10-160904232105/75/Playing-with-camera-preview-buffers-on-BlackBerry-10-29-2048.jpg)





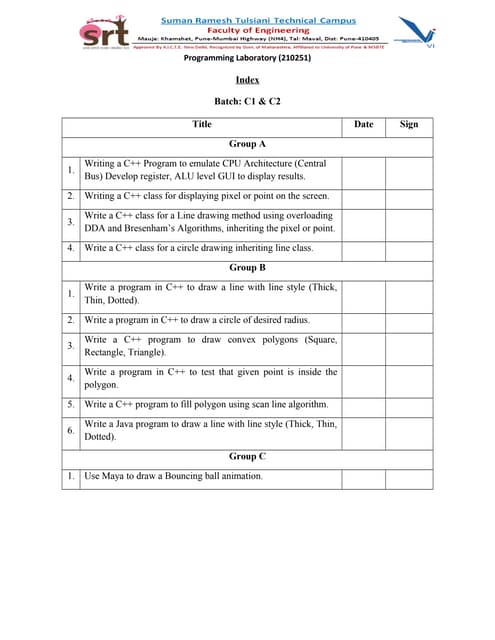
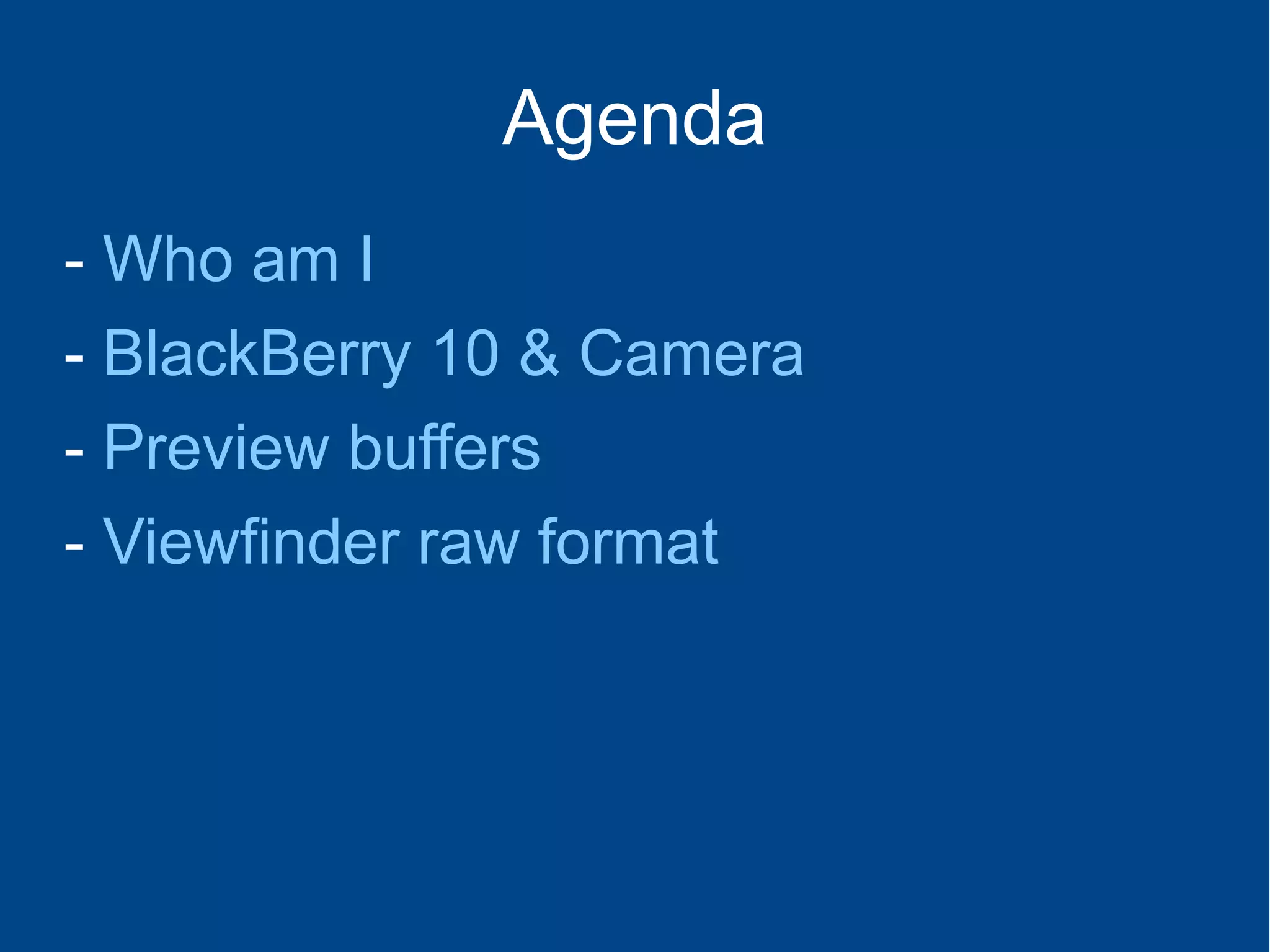
![void precalc() {
for(int i = 0; i < 256; i++) {
factorY[i] = ( 298 * (i - 16)) >> 8;
factorRV[i] = ( 408 * (i - 128)) >> 8;
factorGU[i] = (-100 * (i - 128)) >> 8;
factorGV[i] = (-208 * (i - 128)) >> 8;
factorBU[i] = ( 517 * (i - 128)) >> 8;
}
for(int i = 0; i < 256 + 300; i++) {
clipV[i] = min(max(i - 300, 0), 255);
}
}](https://image.slidesharecdn.com/201410mobiconfbb10-160904232105/75/Playing-with-camera-preview-buffers-on-BlackBerry-10-59-2048.jpg)

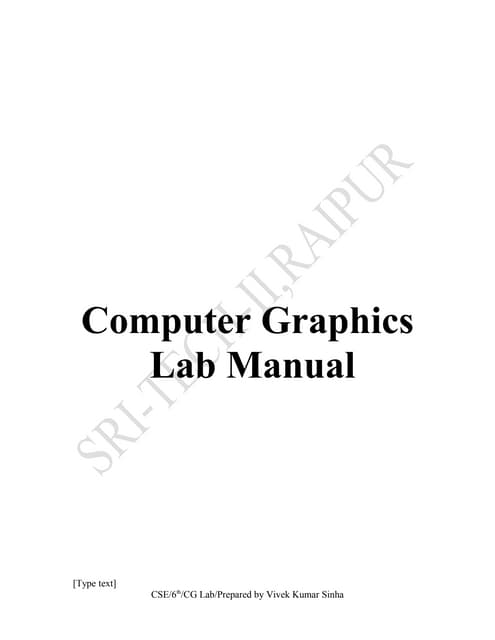
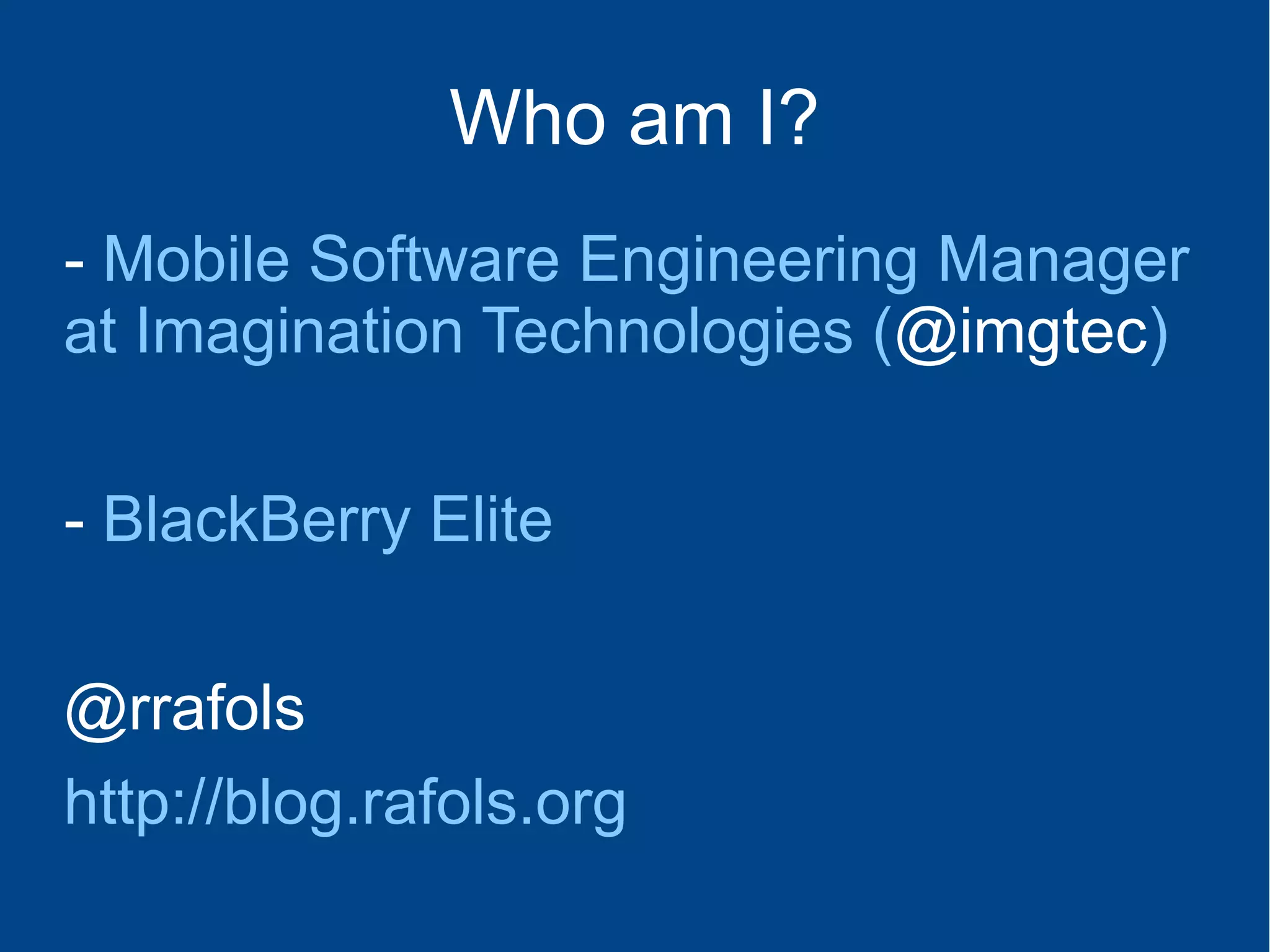
![int chromaR = factorRV[v];
int chromaG = factorGU[u] + factorGV[v];
int chromaB = factorBU[v];
int r0 = clipV[y0 + chromaR + 300];
int g0 = clipV[y0 + chromaG + 300];
int b0 = clipV[y0 + chromaB + 300];
int r1 = clipV[y1 + chromaR + 300];
int g1 = clipV[y1 + chromaG + 300];
int b1 = clipV[y1 + chromaB + 300];](https://image.slidesharecdn.com/201410mobiconfbb10-160904232105/75/Playing-with-camera-preview-buffers-on-BlackBerry-10-61-2048.jpg)

![int *clipV_ = &clipV[300];
int chromaR = factorRV[v];
int chromaG = factorGU[u] + factorGV[v];
int chromaB = factorBU[v];
int r0 = clipV_[y0 + chromaR];
int g0 = clipV_[y0 + chromaG];
int b0 = clipV_[y0 + chromaB];
int r1 = clipV_[y1 + chromaR];
int g1 = clipV_[y1 + chromaG];
int b1 = clipV_[y1 + chromaB];](https://image.slidesharecdn.com/201410mobiconfbb10-160904232105/75/Playing-with-camera-preview-buffers-on-BlackBerry-10-63-2048.jpg)
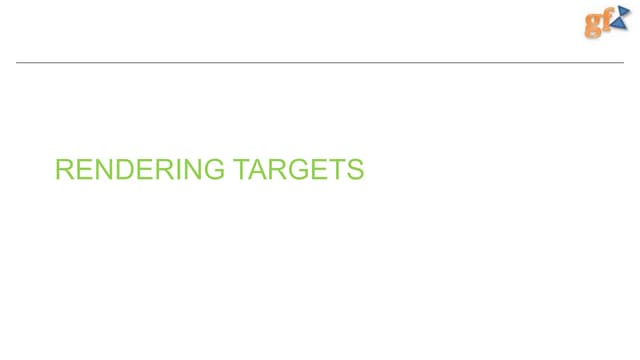
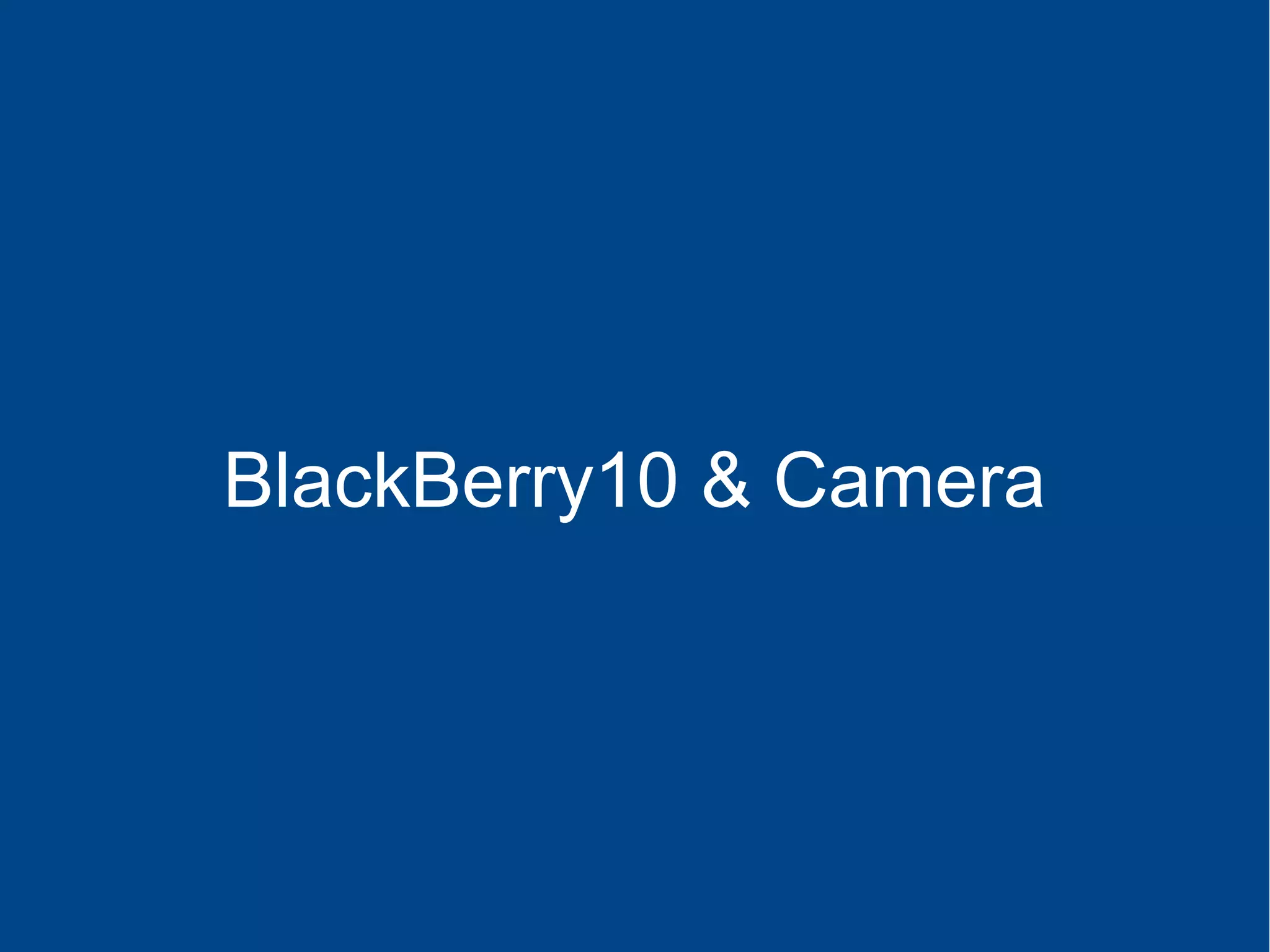
![DON'T
out[wpos ] = b0;
out[wpos + 1] = g0;
out[wpos + 2] = r0;
out[wpos + 3] = 0xff;
out[wpos + 4] = b1;
out[wpos + 5] = g1;
out[wpos + 6] = r1;
out[wpos + 7] = 0xff;
wpos += 8;](https://image.slidesharecdn.com/201410mobiconfbb10-160904232105/75/Playing-with-camera-preview-buffers-on-BlackBerry-10-65-2048.jpg)
![for(i = 0; i < 256 + 300; i++) {
int c = min(max(i - 300, 0), 255);
clipV[i] = c;
clipVR[i] = 0xFF000000 | c << 16);
clipVG[i] = c << 8;
clipVB[i] = c;
}](https://image.slidesharecdn.com/201410mobiconfbb10-160904232105/75/Playing-with-camera-preview-buffers-on-BlackBerry-10-67-2048.jpg)
![DO
out[wpos ] = clipVR_[y0 + chromaR] |
clipVG_[y0 + chromaG] |
clipVB_[y0 + chromaB];
out[wpos + 1] = clipVR_[y1 + chromaR] |
clipVG_[y1 + chromaG] |
clipVB_[y1 + chromaB];
wpos += 8;](https://image.slidesharecdn.com/201410mobiconfbb10-160904232105/75/Playing-with-camera-preview-buffers-on-BlackBerry-10-68-2048.jpg)
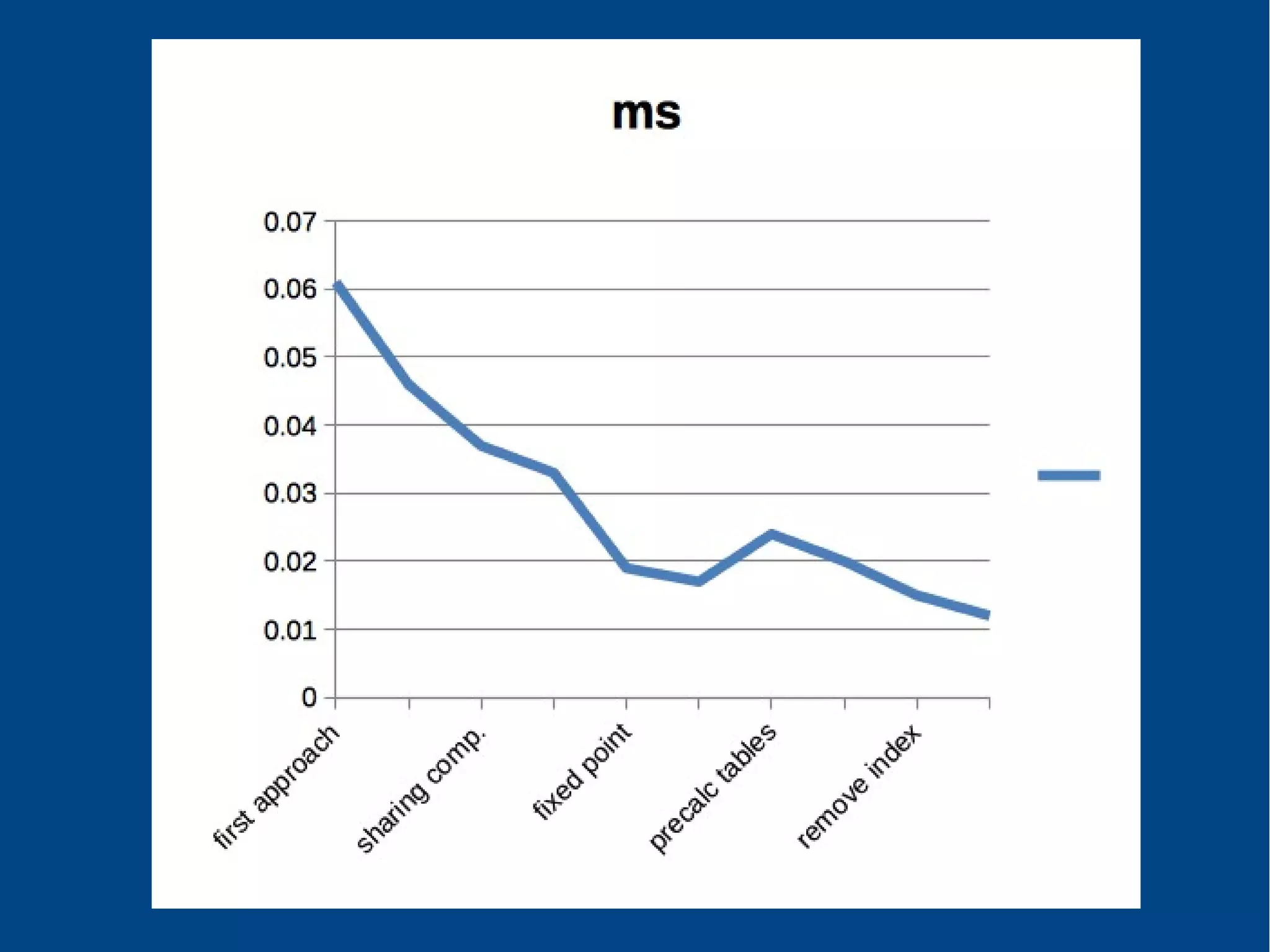

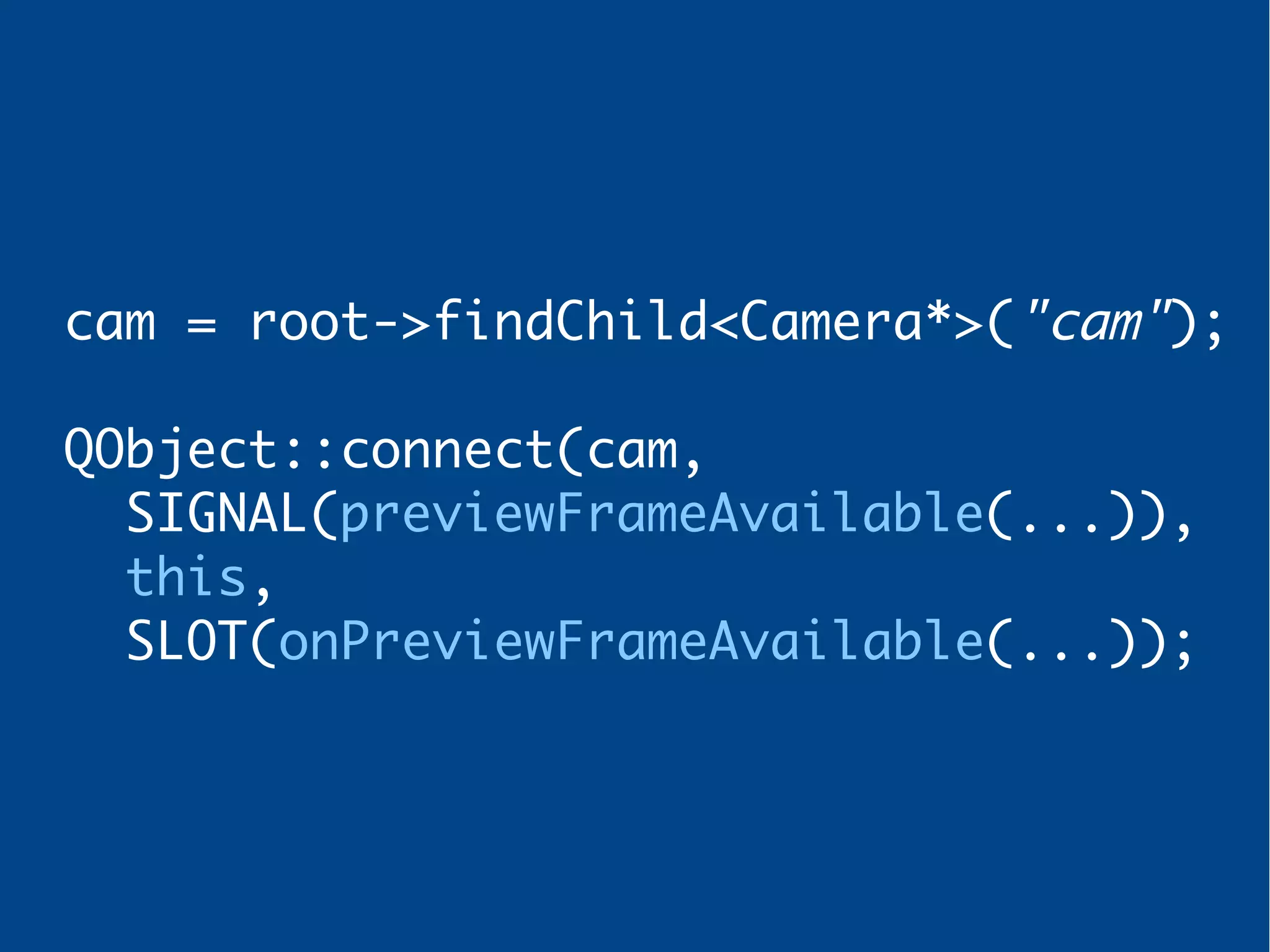
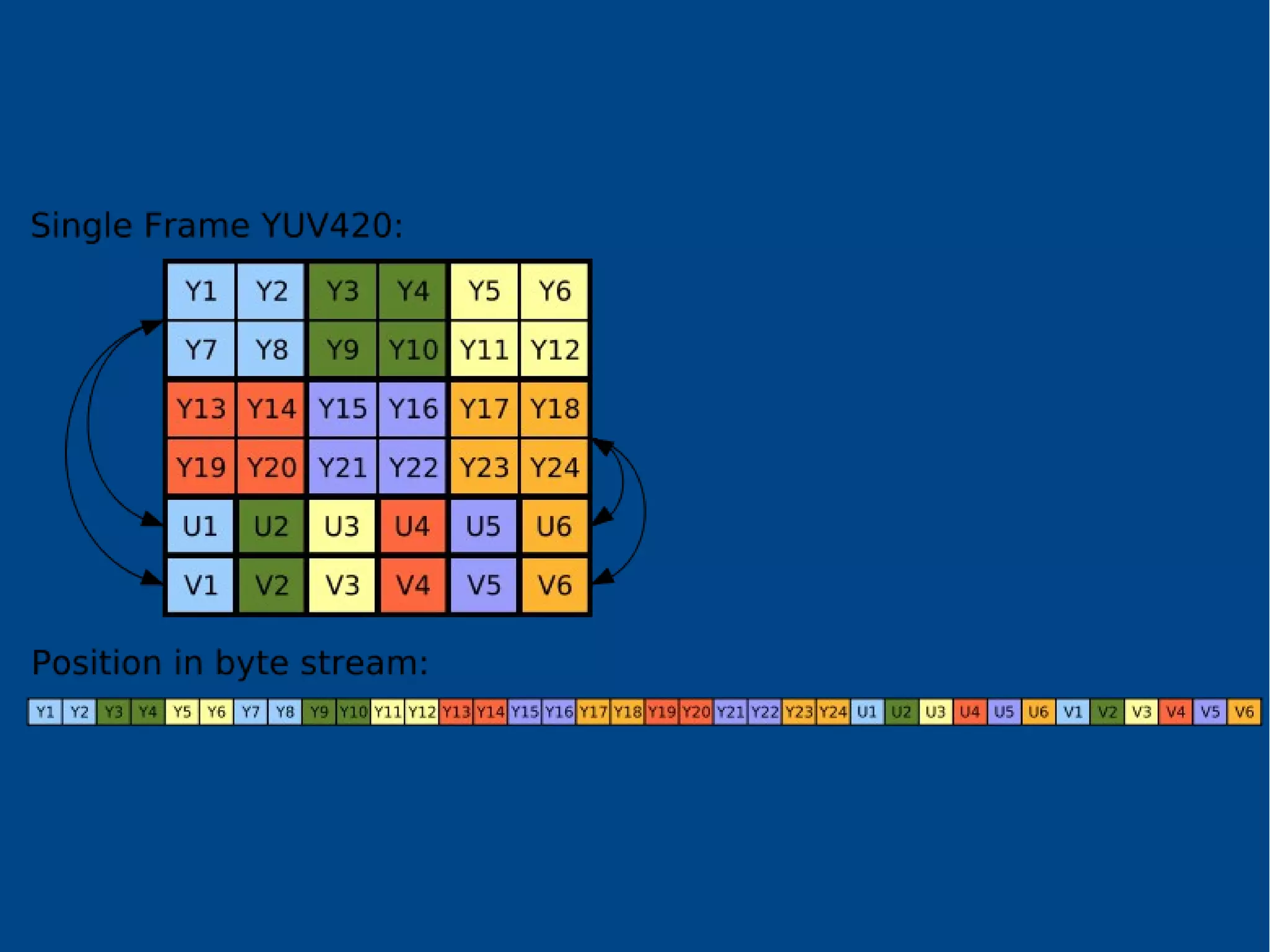
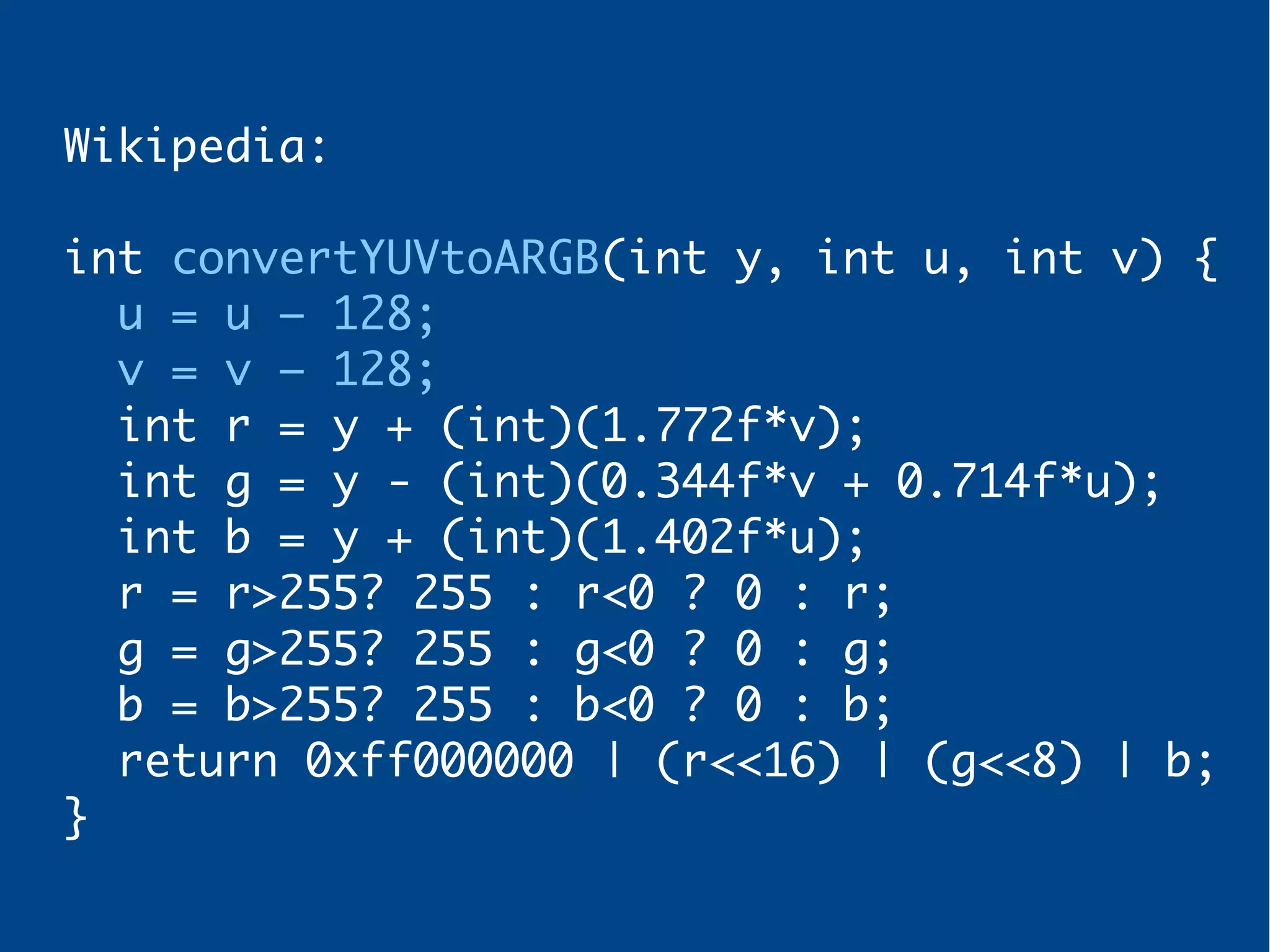
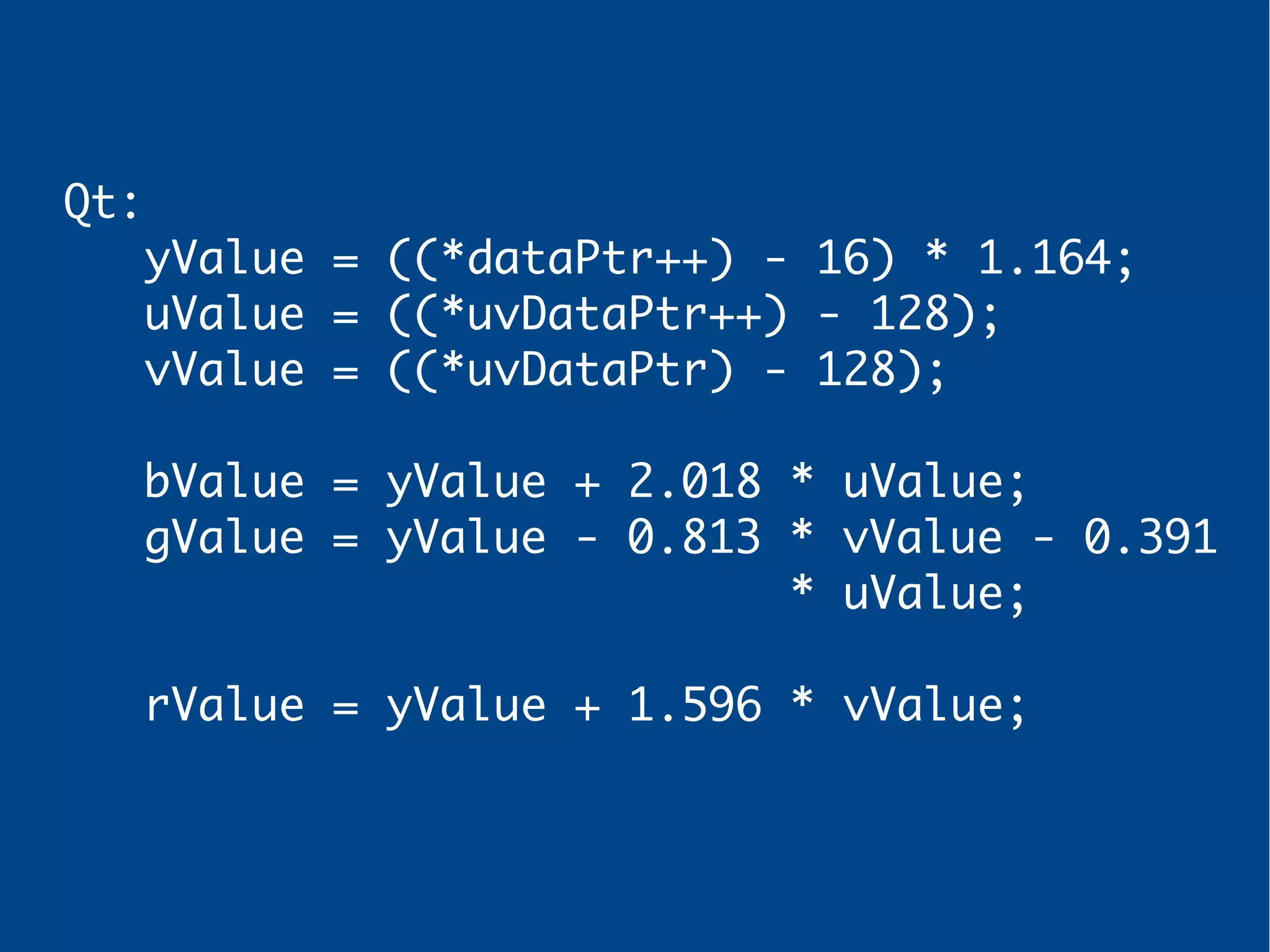
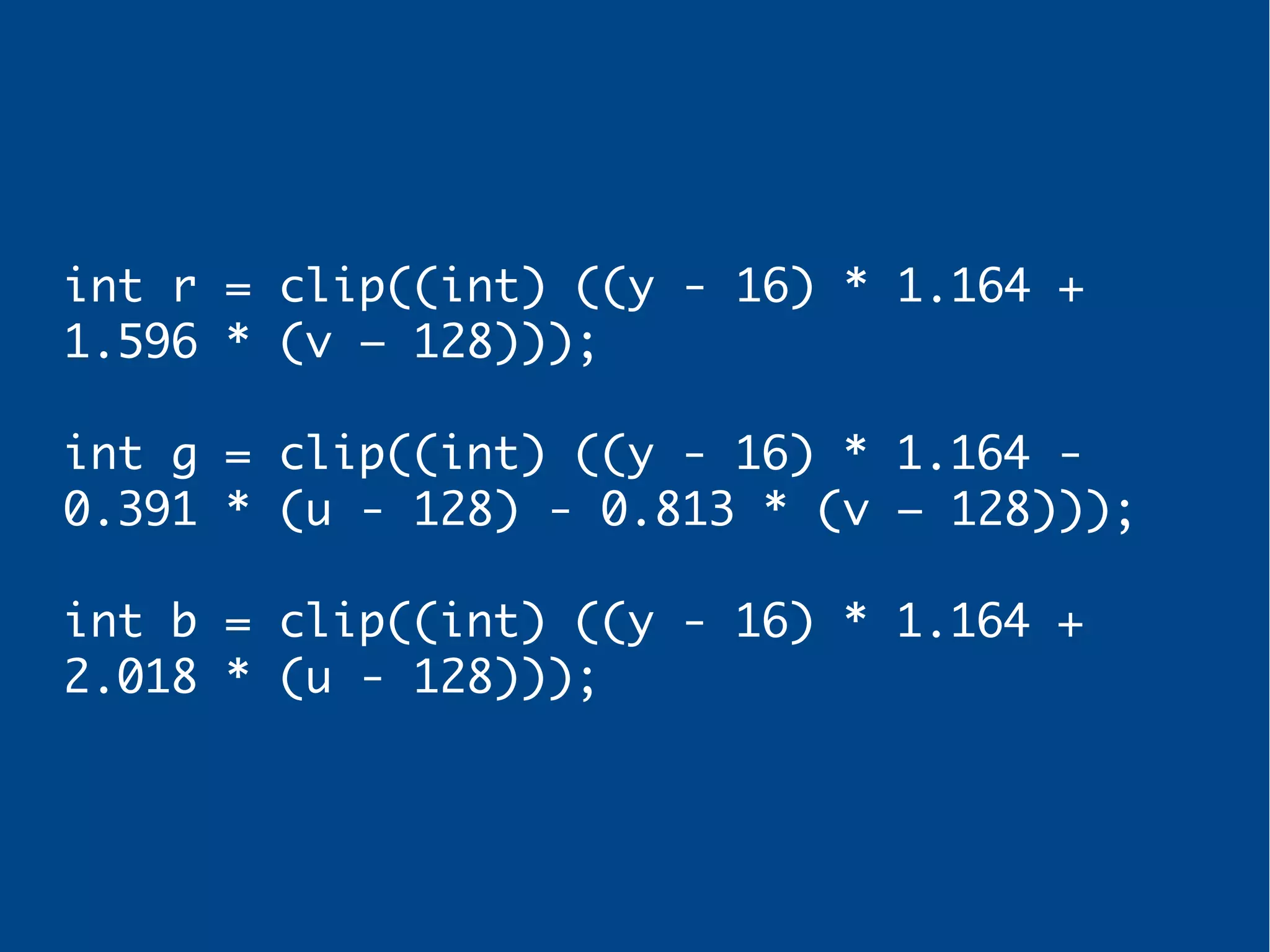
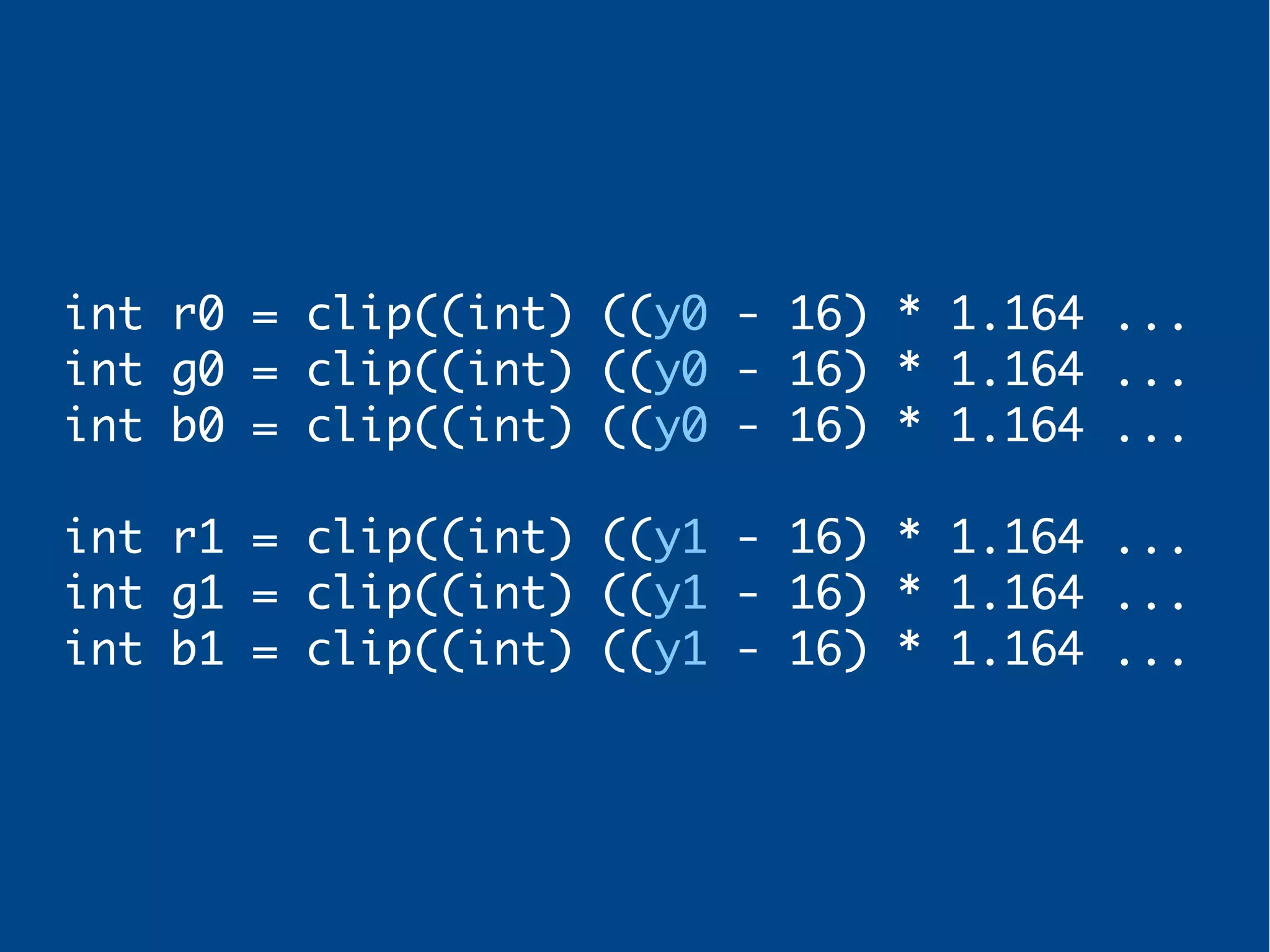
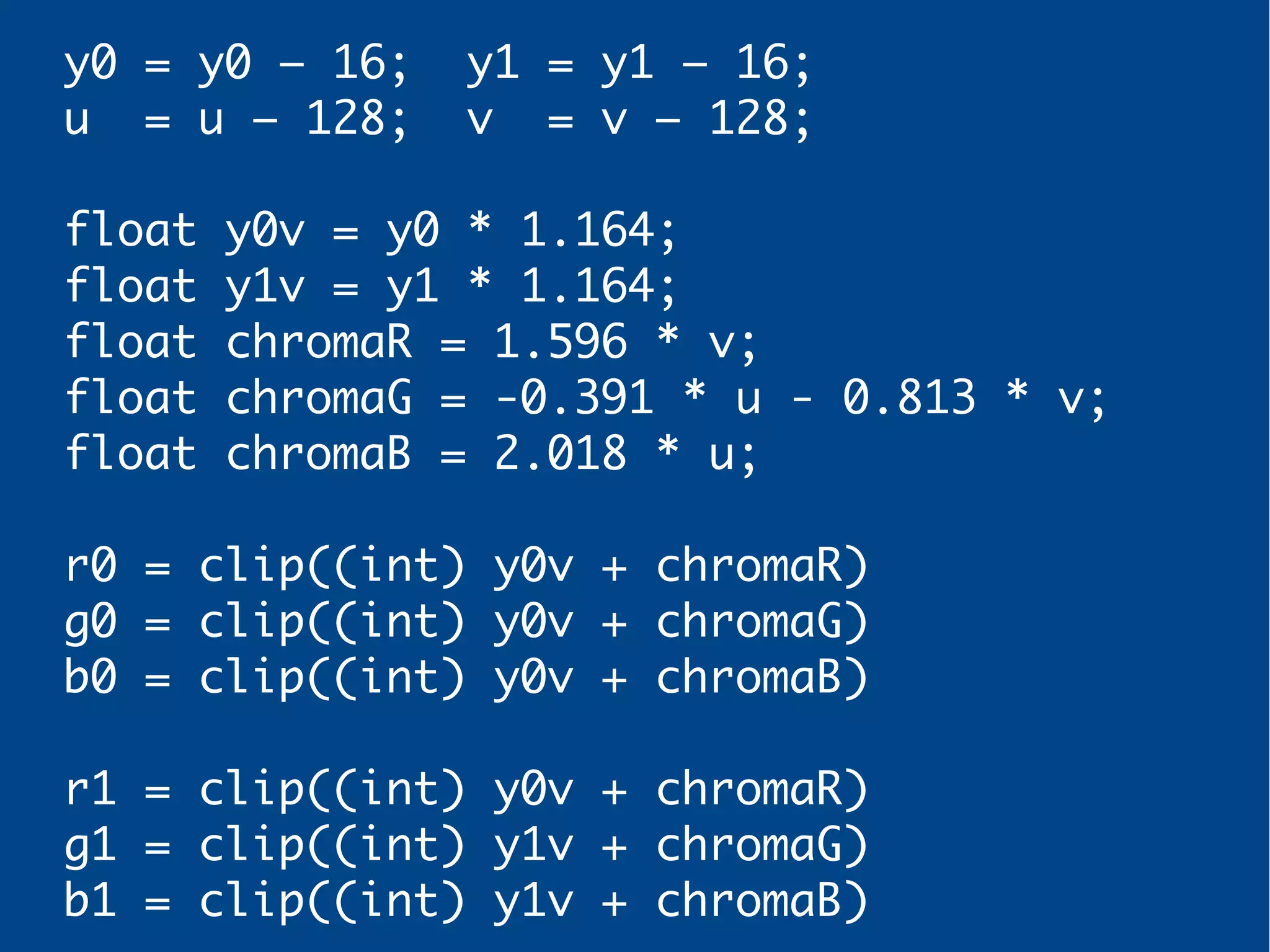
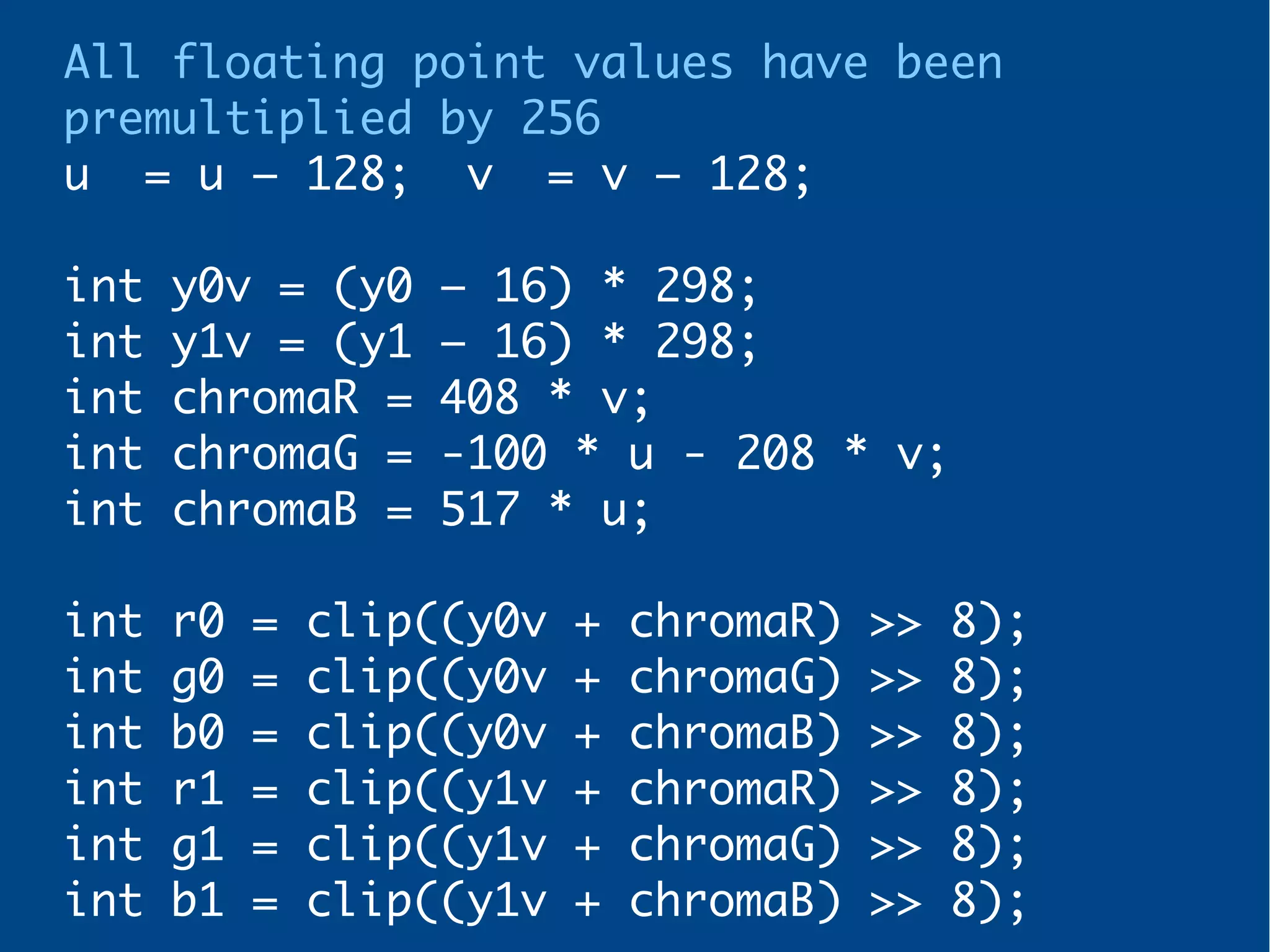
The document discusses playing with camera preview buffers on BlackBerry 10. It provides an overview of different options for accessing preview buffers, including using autocallback, signals, and filters. It then discusses optimizing the conversion of preview buffer formats like NV12 to RGB formats. Key optimizations discussed include using fixed point arithmetic instead of floating point, precalculating values, improving write operations, and removing unnecessary operations to achieve up to a 500% speed improvement.