Downloaded 1,313 times
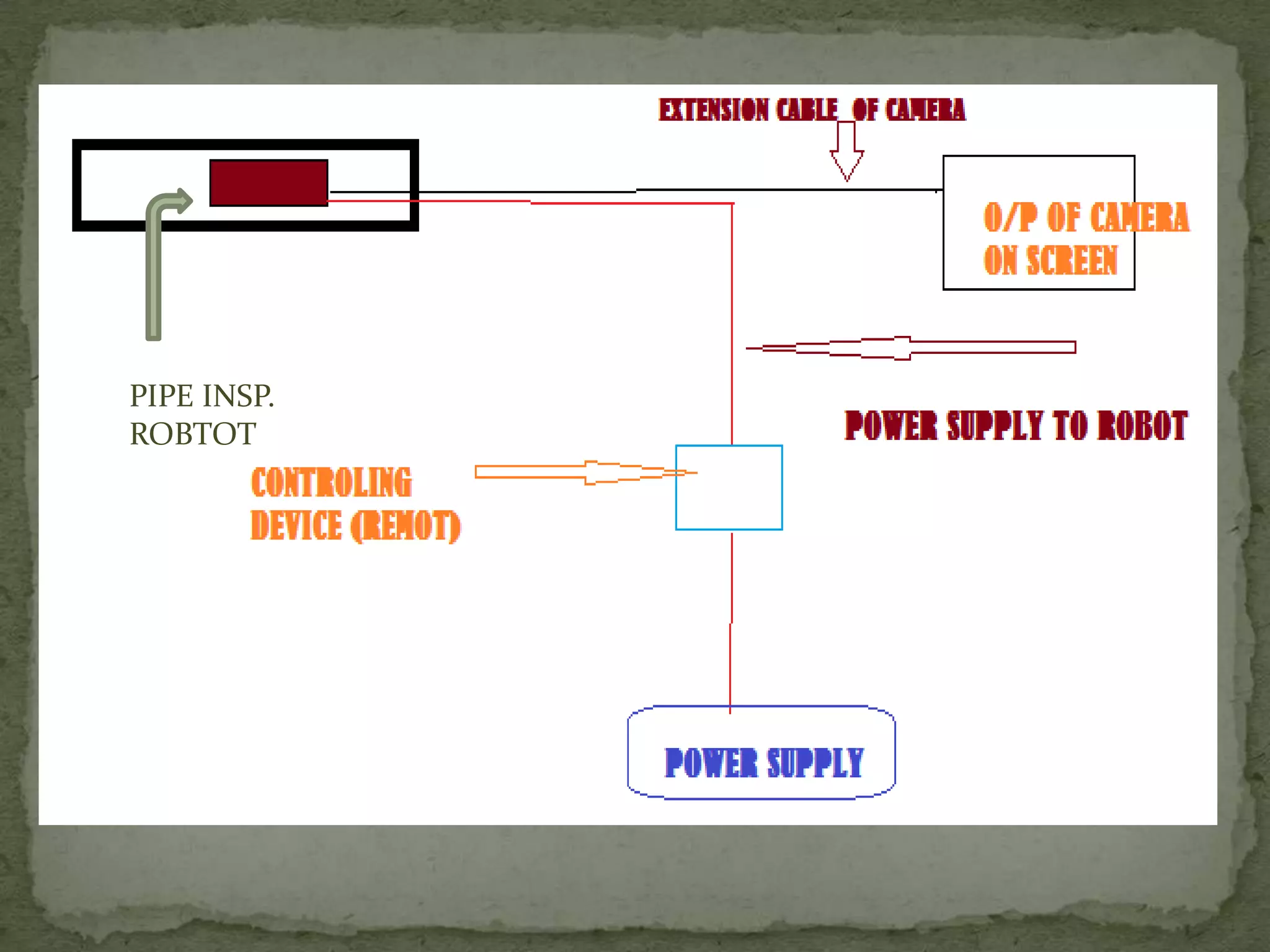
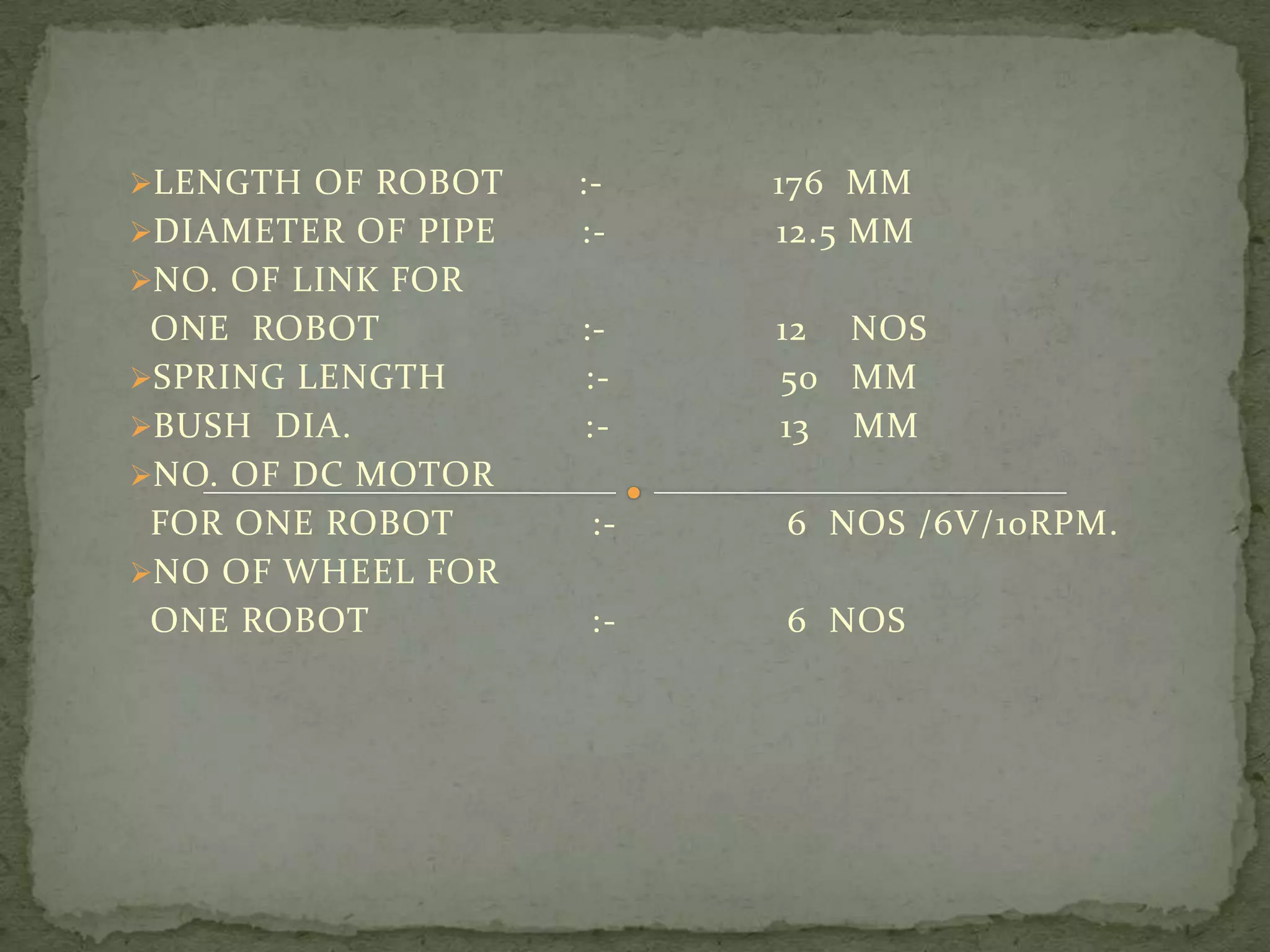
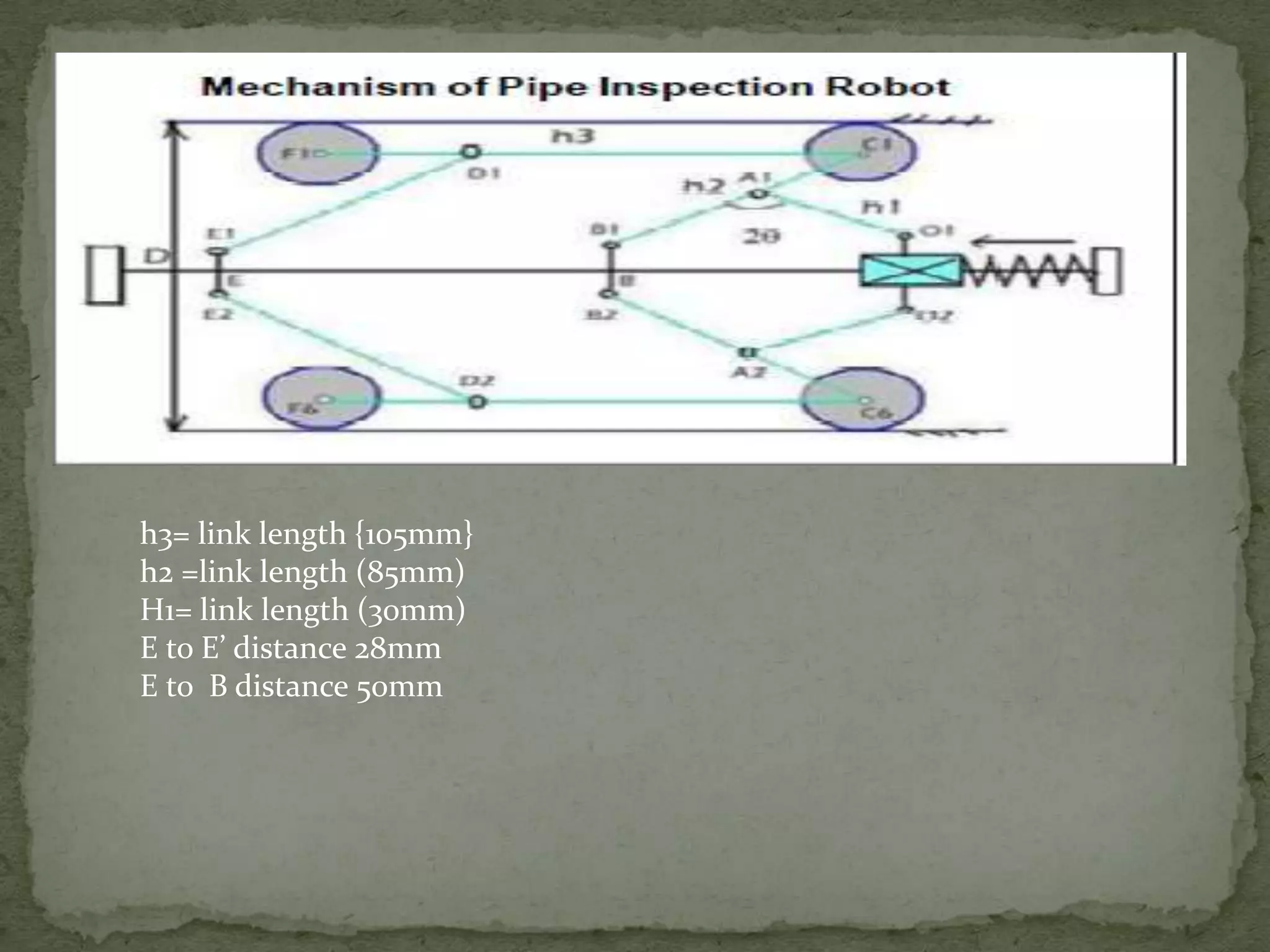
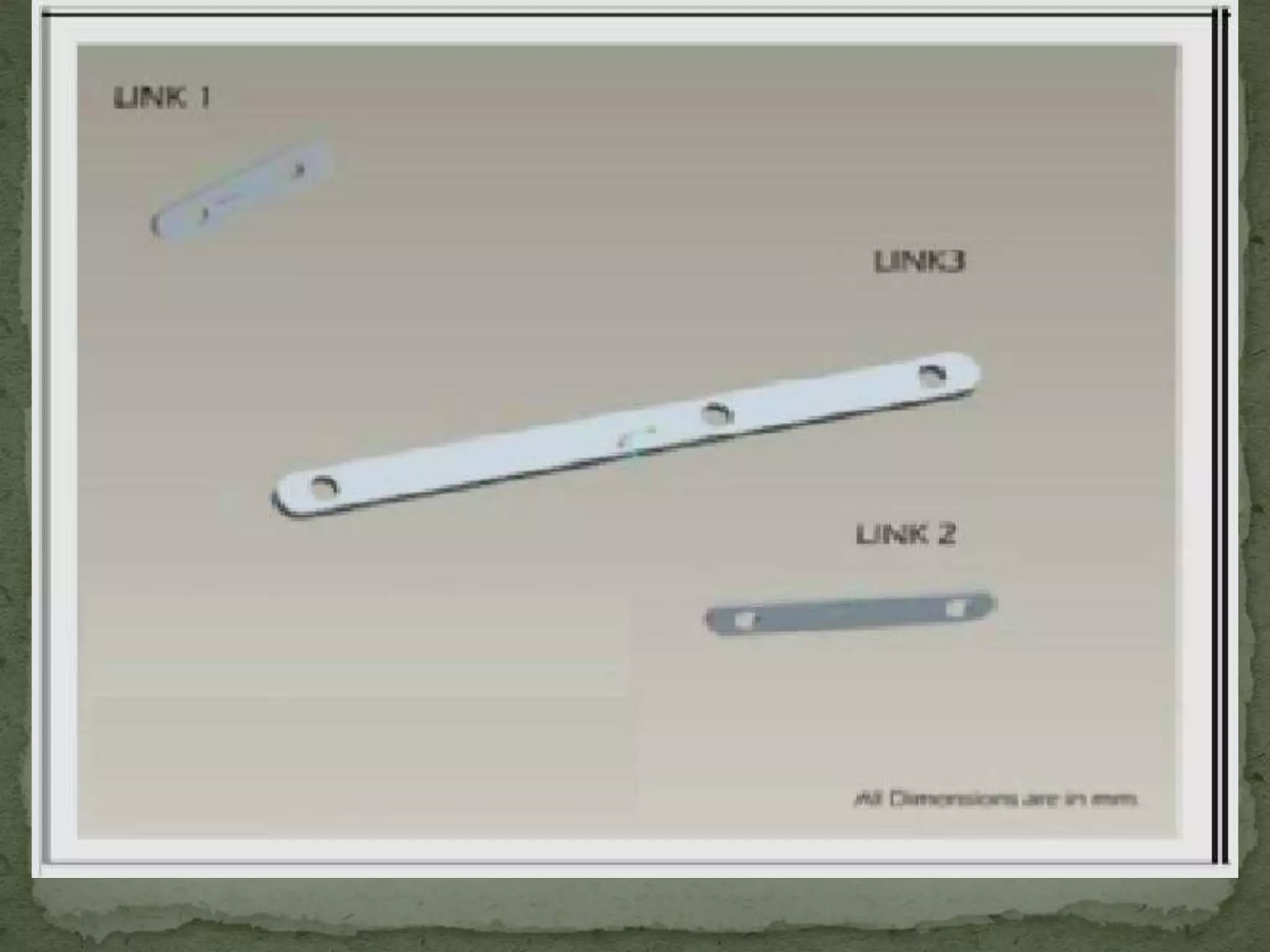
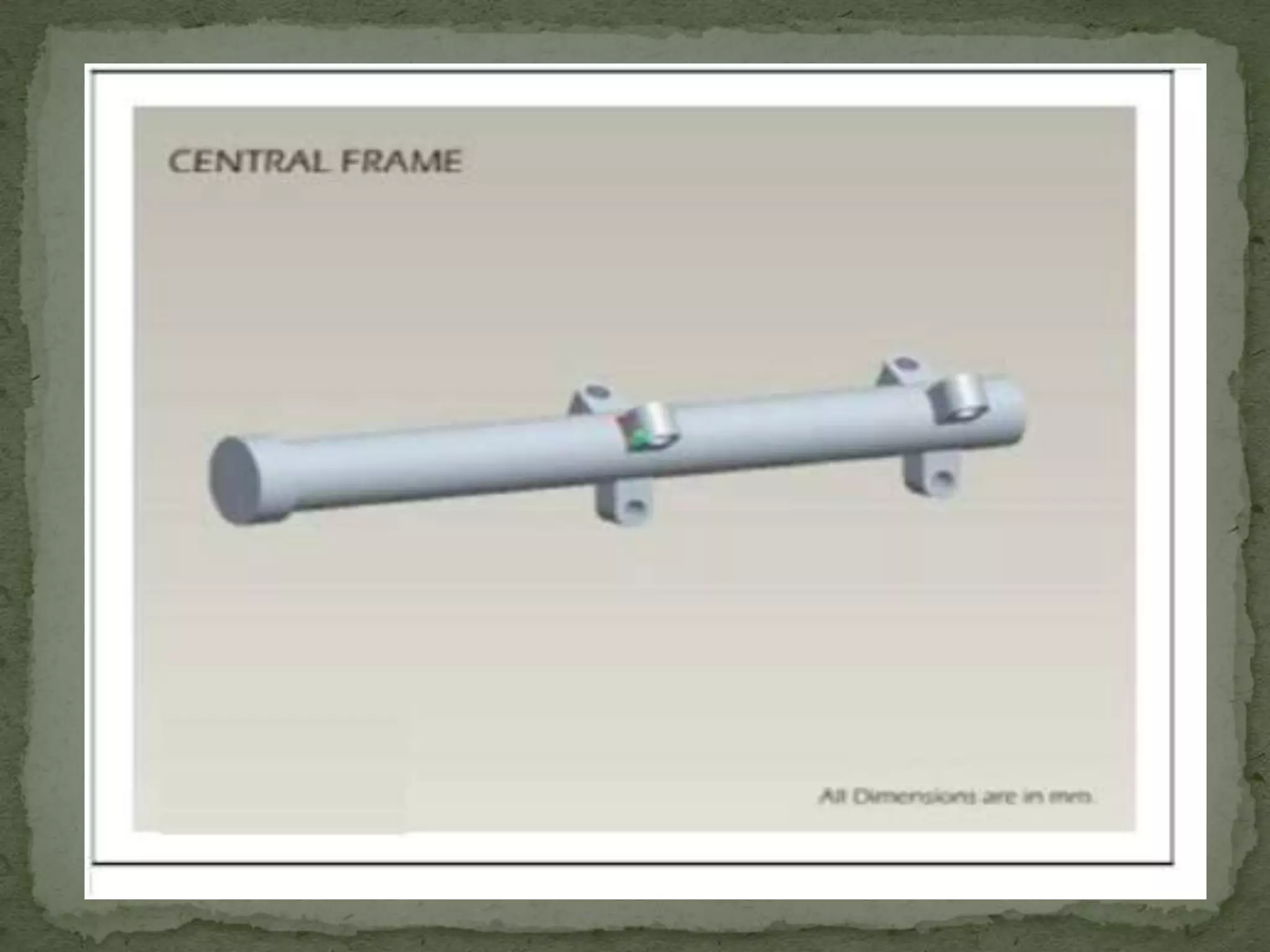
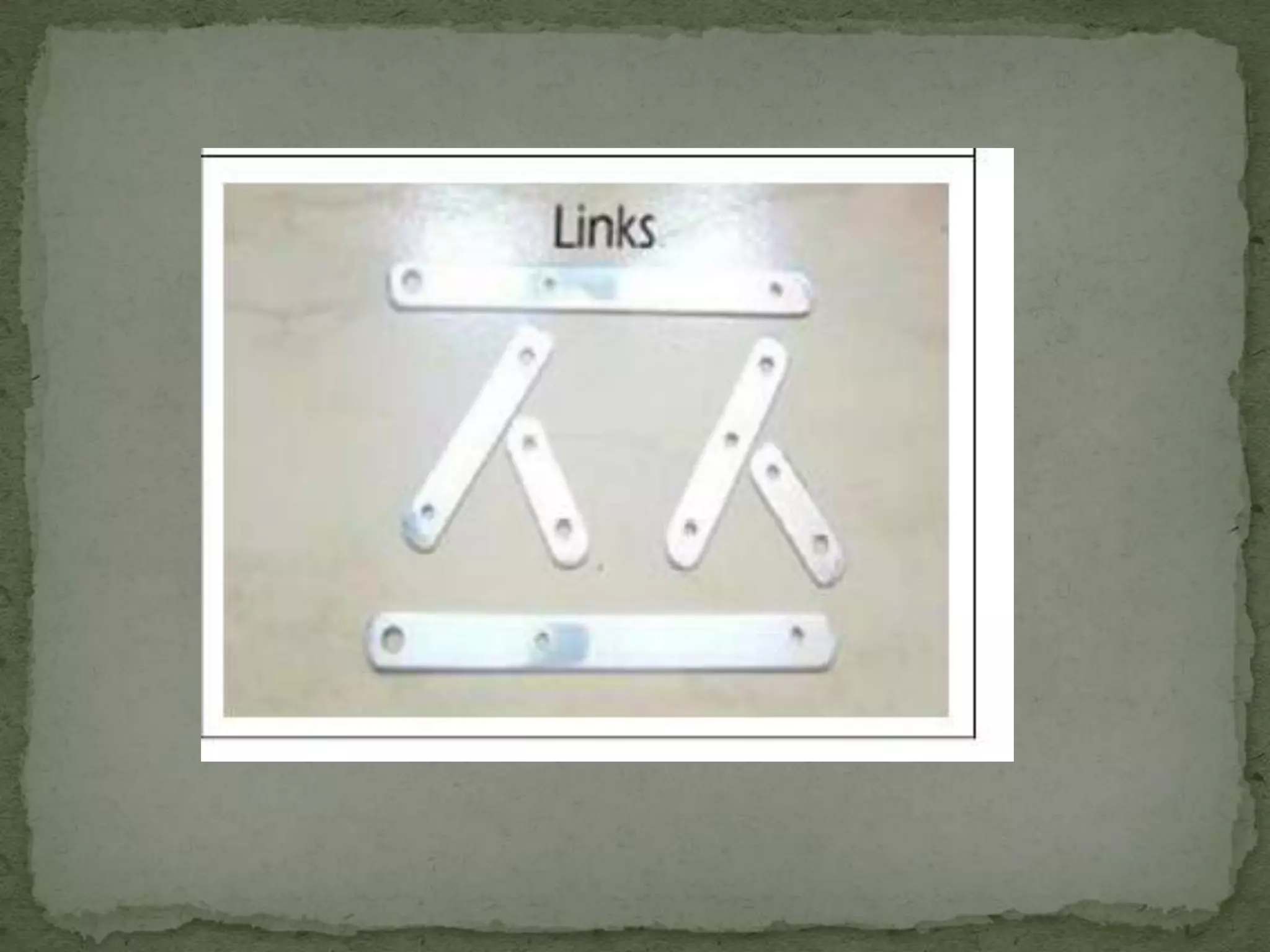
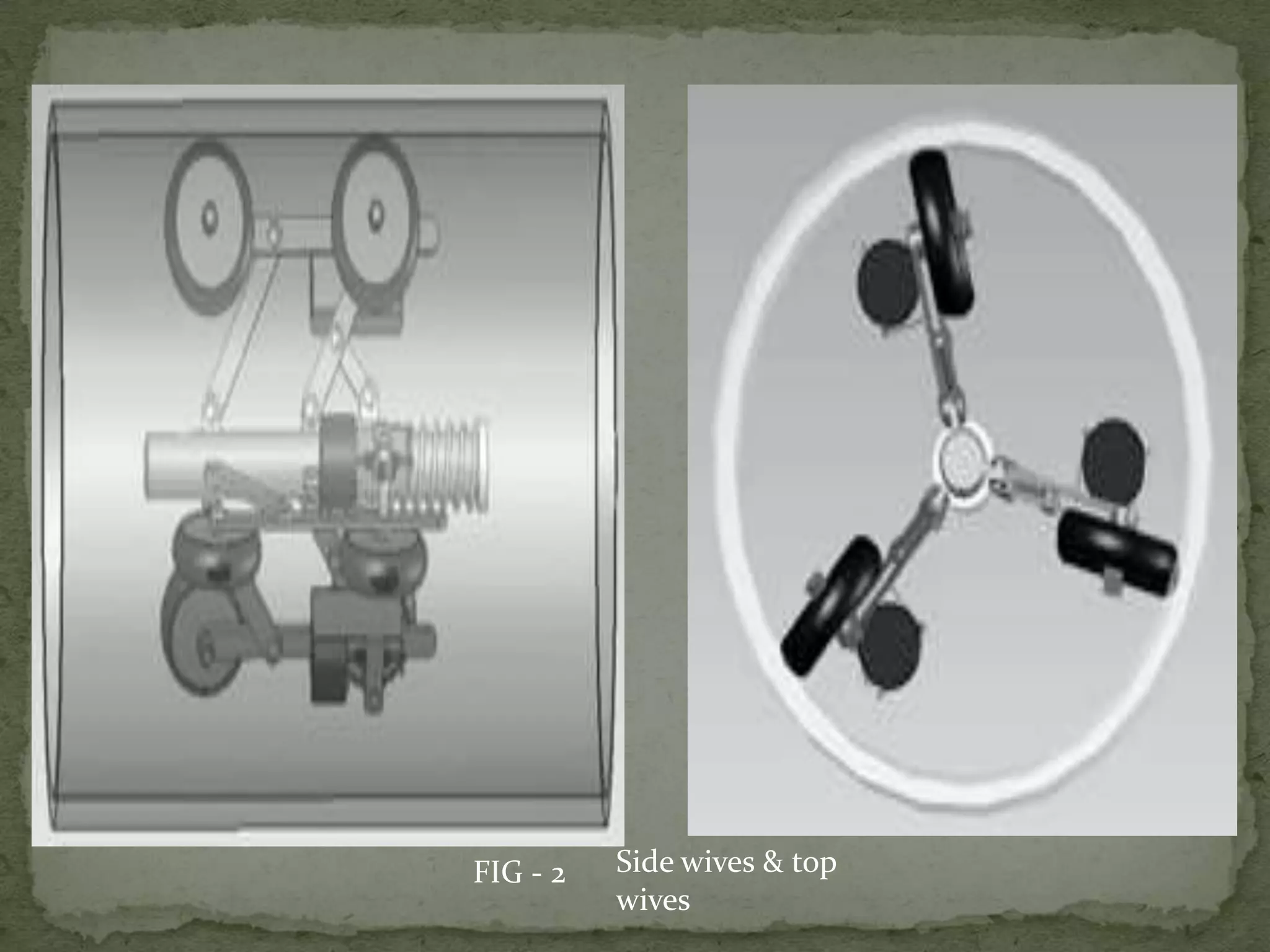
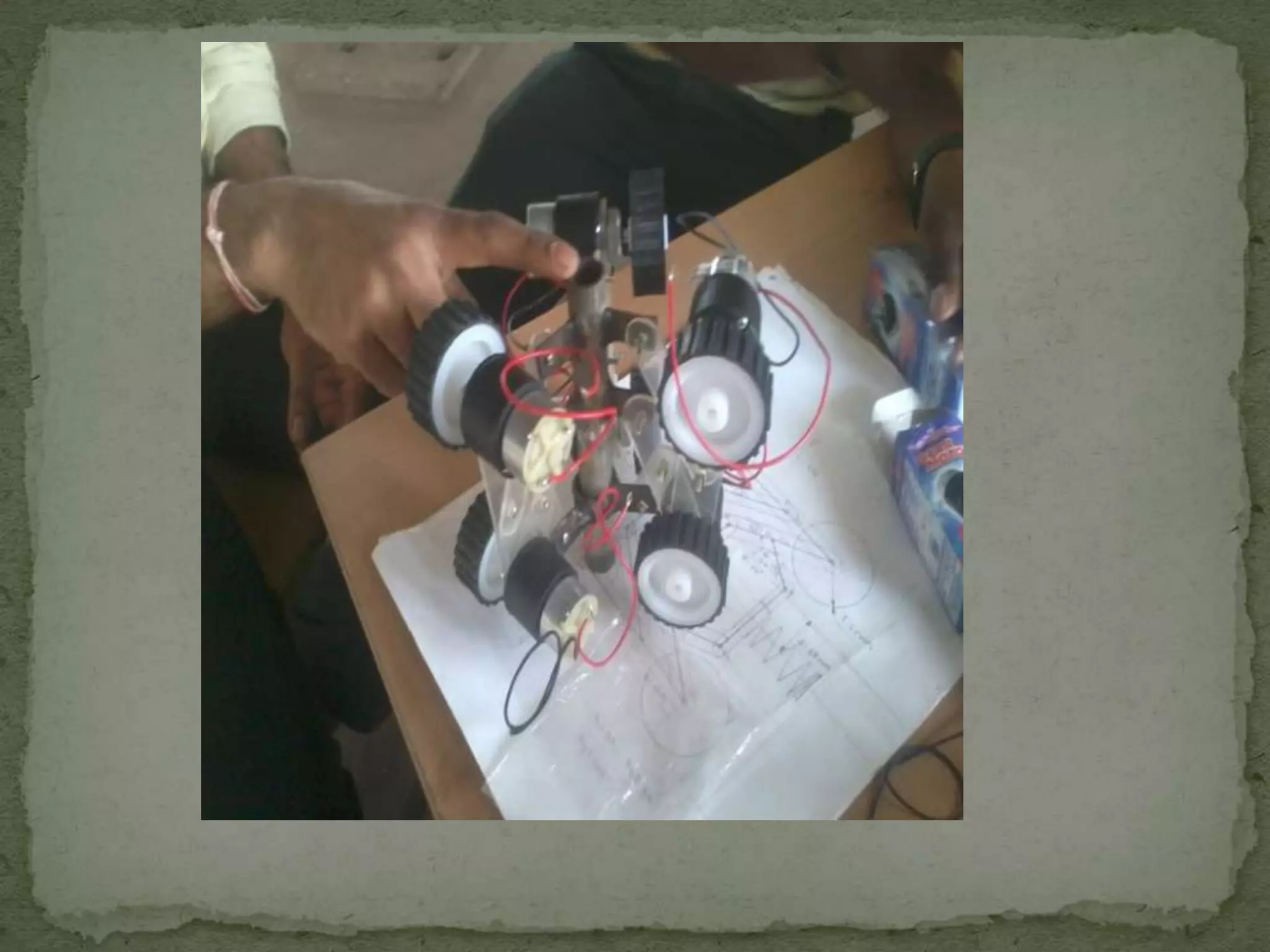



This document discusses the design and fabrication of a pipe inspection robot. It describes how robots can perform dangerous and labor-intensive inspection tasks. The document then discusses different pipe inspection methods and focuses on visual inspection. It provides details on the design of a pipe inspection robot prototype, including its parameters, links, motion calculation and applications. The robot is intended to inspect the interior of pipes ranging from 140-180mm in diameter to detect corrosion, cracks or other defects. Limitations and suitable applications are also covered.






































































![Coded Agents – with UiPath SDK + LangGraph [Virtual Hands-on Workshop]](https://cdn.slidesharecdn.com/ss_thumbnails/codedagentsdeck-251215155422-5497c599-thumbnail.jpg?width=640&height=640&fit=bounds)
















