Download to read offline












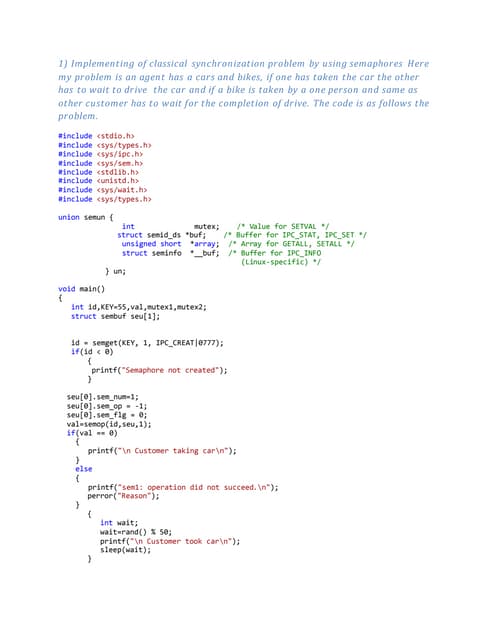
The document discusses several programming languages and libraries that provide concurrency constructs for parallel programming. It describes features for concurrency in Ada 95, Java, and C/C++ libraries including pthreads. Key features covered include threads, mutual exclusion locks, condition variables, and examples of implementing a bounded buffer for inter-thread communication.








































































![5G Explained! A High Level Overview [Introduction]](https://cdn.slidesharecdn.com/ss_thumbnails/5gexplainedahighleveloverview-260119165306-cc137a3e-thumbnail.jpg?width=640&height=640&fit=bounds)










