Download as PDF, PPTX



















![Common pointer pitfalls
• Buffer overrun
– vector or other standard containers
• Dangling pointer
– shared_ptr/weak_ptr
• Double delete
– scoped_ptr
• Memory leak
– scoped_ptr
• Unpaired new[]/delete
– vector, shared_array, scoped_array
blog.csdn.net/Solstice giantchen@gmail.com 23](https://image.slidesharecdn.com/dtormeetsmtani-110707193605-phpapp02/85/Where-destructors-meet-threads-23-320.jpg)

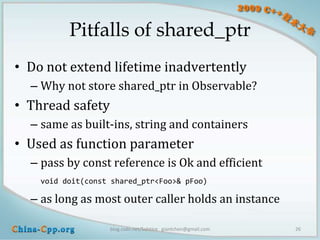

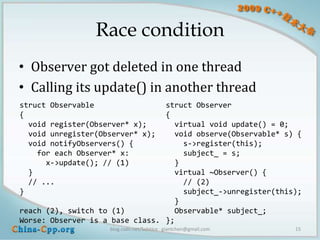
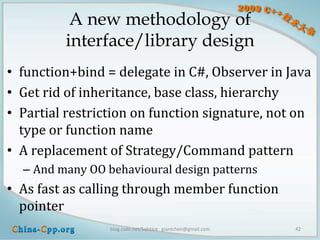
![weak_ptr to rescue (?)
• Memory leak! data_ keeps growing
class FooCache : boost::noncopyable
{
public:
shared_ptr<Foo> get(const string& key) {
shared_ptr<Foo> pFoo;
MutexLock lock(mutex_);
weak_ptr<Foo>& wkFoo = data_[key];
pFoo = wkFoo.lock();
if (!pFoo) { pFoo.reset(new Foo(key)); wkFoo = pFoo; }
return pFoo;
}
private:
map<string, weak_ptr<Foo> > data_;
mutable Mutex mutex_;
};
blog.csdn.net/Solstice giantchen@gmail.com 28](https://image.slidesharecdn.com/dtormeetsmtani-110707193605-phpapp02/85/Where-destructors-meet-threads-28-320.jpg)













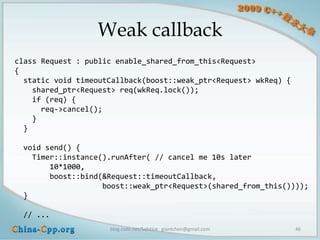





The document discusses thread safety issues when object lifetimes are managed across multiple threads using raw pointers in C++. It introduces shared_ptr and weak_ptr from the standard library as a solution. Shared pointers allow reference counting to determine object lifetimes safely across threads without explicit locking. Weak pointers can check if a shared object still exists without increasing the reference count. This pattern solves common problems like race conditions in observer design patterns when notifications outlive observed objects.