Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
EN
Uploaded by
NTT Communications Technology Development
PDF, PPTX
969 views
OpenStack Summit Tokyo 興味をひいたセッション
OpenStack Summit Tokyo報告会で発表した資料です。
Technology
◦
Read more
3
Save
Share
Embed
Embed presentation
Download
Download as PDF, PPTX
1
/ 25
2
/ 25
3
/ 25
4
/ 25
5
/ 25
6
/ 25
7
/ 25
8
/ 25
9
/ 25
10
/ 25
11
/ 25
12
/ 25
13
/ 25
14
/ 25
15
/ 25
16
/ 25
17
/ 25
18
/ 25
19
/ 25
20
/ 25
21
/ 25
22
/ 25
23
/ 25
24
/ 25
25
/ 25
More Related Content
PDF
OpenStack Summit Vancouver YVR Ops
by
NTT Communications Technology Development
PDF
OpenStack Summit Expo
by
NTT Communications Technology Development
PDF
OpsからみたOpenStack Summit
by
NTT Communications Technology Development
PDF
OpenStack Ops Mid-cycle Meetup 参加報告
by
NTT Communications Technology Development
PDF
TPAC 2015 WebRTC WG 最新レポート
by
NTT Communications Technology Development
PPTX
Summit前にやることTODO
by
Hirofumi Ichihara
PDF
OpenStack Ops Mid-Cycle Meetup & Project Team Gathering出張報告
by
NTT Communications Technology Development
PDF
RabbitMQ can scale out!!(jp ops-workshop-3)
by
NTT Communications Technology Development
OpenStack Summit Vancouver YVR Ops
by
NTT Communications Technology Development
OpenStack Summit Expo
by
NTT Communications Technology Development
OpsからみたOpenStack Summit
by
NTT Communications Technology Development
OpenStack Ops Mid-cycle Meetup 参加報告
by
NTT Communications Technology Development
TPAC 2015 WebRTC WG 最新レポート
by
NTT Communications Technology Development
Summit前にやることTODO
by
Hirofumi Ichihara
OpenStack Ops Mid-Cycle Meetup & Project Team Gathering出張報告
by
NTT Communications Technology Development
RabbitMQ can scale out!!(jp ops-workshop-3)
by
NTT Communications Technology Development
What's hot
PPTX
Upstream University
by
NTT Communications Technology Development
PPTX
OpenStack Summit Vancouverにおけるコンテナ関連トピック
by
NTT Communications Technology Development
PPTX
Report of OpenStack Ops Meetup Palo Alto (in Japanese)
by
Hirofumi Ichihara
PDF
Mexico ops meetup発表資料 20170905
by
NTT Communications Technology Development
PPTX
OPNFV詳細編 – OpenStack最新情報セミナー 2015年4月
by
VirtualTech Japan Inc.
PPTX
OpenStack Neutron プロジェクトから見たソフトウェアスイッチ動向
by
Hirofumi Ichihara
PPTX
OpenStackコミュニティに対する取り組み - OpenStack最新情報セミナー 2016年5月
by
VirtualTech Japan Inc.
PDF
OpenStack Summit 2016 Barcelona NFV関連報告
by
kimura50
PDF
高度クラウド環境だからこそ、運用自動化・一元化
by
Hinemos
PPTX
OpenStack Summit Austin 2016 参加報告 - OpenStack最新情報セミナー 2016年5月
by
VirtualTech Japan Inc.
PPTX
OpenStack Project Update Neutron Update
by
Hirofumi Ichihara
PDF
忙しい人のためのOpenStack超サマリ
by
Naoto Umemori
PDF
Dockerコミュニティ近況
by
Akihiro Suda
PDF
ひとりではじめる OpenStack Summit の楽しみ方
by
Takanari Konishi
PDF
OpenStackもオンプレミスもまとめて一元監視 Hatohol+Zabbixでハイブリッドクラウド監視を実現 - OpenStack最新情報セミナー...
by
VirtualTech Japan Inc.
PDF
GPU Container as a Service を実現するための最新OSS徹底比較
by
NTT Communications Technology Development
PPTX
OSS光と闇
by
Hirofumi Ichihara
PPTX
OSSコミッタの生活とその必要性
by
Hirofumi Ichihara
PDF
Troveコミュニティ動向
by
NTT Communications Technology Development
PDF
AIの力で障害検知・解析をサポート!Loom(ログ解析ソリューション)のご紹介 - OpenStack最新情報セミナー 2017年7月
by
VirtualTech Japan Inc.
Upstream University
by
NTT Communications Technology Development
OpenStack Summit Vancouverにおけるコンテナ関連トピック
by
NTT Communications Technology Development
Report of OpenStack Ops Meetup Palo Alto (in Japanese)
by
Hirofumi Ichihara
Mexico ops meetup発表資料 20170905
by
NTT Communications Technology Development
OPNFV詳細編 – OpenStack最新情報セミナー 2015年4月
by
VirtualTech Japan Inc.
OpenStack Neutron プロジェクトから見たソフトウェアスイッチ動向
by
Hirofumi Ichihara
OpenStackコミュニティに対する取り組み - OpenStack最新情報セミナー 2016年5月
by
VirtualTech Japan Inc.
OpenStack Summit 2016 Barcelona NFV関連報告
by
kimura50
高度クラウド環境だからこそ、運用自動化・一元化
by
Hinemos
OpenStack Summit Austin 2016 参加報告 - OpenStack最新情報セミナー 2016年5月
by
VirtualTech Japan Inc.
OpenStack Project Update Neutron Update
by
Hirofumi Ichihara
忙しい人のためのOpenStack超サマリ
by
Naoto Umemori
Dockerコミュニティ近況
by
Akihiro Suda
ひとりではじめる OpenStack Summit の楽しみ方
by
Takanari Konishi
OpenStackもオンプレミスもまとめて一元監視 Hatohol+Zabbixでハイブリッドクラウド監視を実現 - OpenStack最新情報セミナー...
by
VirtualTech Japan Inc.
GPU Container as a Service を実現するための最新OSS徹底比較
by
NTT Communications Technology Development
OSS光と闇
by
Hirofumi Ichihara
OSSコミッタの生活とその必要性
by
Hirofumi Ichihara
Troveコミュニティ動向
by
NTT Communications Technology Development
AIの力で障害検知・解析をサポート!Loom(ログ解析ソリューション)のご紹介 - OpenStack最新情報セミナー 2017年7月
by
VirtualTech Japan Inc.
Viewers also liked
PDF
NTT Tech Conference #1 Closing Keynote
by
NTT Communications Technology Development
PDF
NTT Tech Conference #1 Opening Keynote
by
NTT Communications Technology Development
PDF
Collect, summarize and notify of OpenStack's log
by
NTT Communications Technology Development
PDF
Ruby meets Go
by
NTT Communications Technology Development
PDF
Automated Deployment & Benchmarking with Chef, Cobbler and Rally for OpenStack
by
NTT Communications Technology Development
PDF
WebRTCで動かす“テレイグジスタンス”ロボット
by
NTT Communications Technology Development
PDF
社内勉強会を継続成長させる方法
by
NTT Communications Technology Development
PDF
Fluentd vs. Logstash for OpenStack Log Management
by
NTT Communications Technology Development
PPTX
OpenStackユーザ会資料 - Masakari
by
masahito12
PDF
OpenStack Summit Vancouver Summary
by
Ikuo Kumagai
PDF
OpenStack Summitの歩き方
by
Hideki Saito
PDF
⼤企業で実現するイマドキの内製開発
by
NTT Communications Technology Development
PPT
Urban Hacks
by
yuiseki yuiseki
PPT
think ecogeek
by
yuiseki yuiseki
PDF
Rubyで実はwritev(2) が使われているはなし
by
Masaki Matsushita
PPTX
545人のインフラを支えたNOCチーム!
by
Masayuki Kobayashi
NTT Tech Conference #1 Closing Keynote
by
NTT Communications Technology Development
NTT Tech Conference #1 Opening Keynote
by
NTT Communications Technology Development
Collect, summarize and notify of OpenStack's log
by
NTT Communications Technology Development
Ruby meets Go
by
NTT Communications Technology Development
Automated Deployment & Benchmarking with Chef, Cobbler and Rally for OpenStack
by
NTT Communications Technology Development
WebRTCで動かす“テレイグジスタンス”ロボット
by
NTT Communications Technology Development
社内勉強会を継続成長させる方法
by
NTT Communications Technology Development
Fluentd vs. Logstash for OpenStack Log Management
by
NTT Communications Technology Development
OpenStackユーザ会資料 - Masakari
by
masahito12
OpenStack Summit Vancouver Summary
by
Ikuo Kumagai
OpenStack Summitの歩き方
by
Hideki Saito
⼤企業で実現するイマドキの内製開発
by
NTT Communications Technology Development
Urban Hacks
by
yuiseki yuiseki
think ecogeek
by
yuiseki yuiseki
Rubyで実はwritev(2) が使われているはなし
by
Masaki Matsushita
545人のインフラを支えたNOCチーム!
by
Masayuki Kobayashi
Similar to OpenStack Summit Tokyo 興味をひいたセッション
PDF
OpenStack Vancouver Summit Report presented at nttgroup meeting in Japanese
by
Toshikazu Ichikawa
PDF
openstack_neutron-ovs_osc2014tf_20141019
by
Takehiro Kudou
PPTX
Network as a Service - Data plane evolution and abstraction by NSM
by
Miya Kohno
PDF
シスコ装置を使い倒す!組込み機能による可視化からセキュリティ強化
by
シスコシステムズ合同会社
PDF
openstack_neutron-dvr_os5thaniv_20150713
by
Takehiro Kudou
PDF
OpenStack入門 2016/06/10
by
株式会社 NTTテクノクロス
PDF
20131211 Neutron Havana
by
Akihiro Motoki
PDF
データが覗いたOpenStack Summit Vancouver
by
Kentaro Takeda
PPTX
DeNA private cloud のその後 - OpenStack最新情報セミナー(2017年3月)
by
VirtualTech Japan Inc.
PDF
「Neutronになって理解するOpenStack Network」~Neutron/Open vSwitchなどNeutronと周辺技術の解説~ - ...
by
VirtualTech Japan Inc.
PDF
OPNFV Summit Feedback - OpenStack最新情報セミナー 2017年7月
by
VirtualTech Japan Inc.
PDF
OpenStack Summit November 2014 Paris出張報告
by
Mitsuhiro SHIGEMATSU
PDF
OpenStack超入門シリーズ いまさら聞けないNeutronの使い方
by
Toru Makabe
PPTX
Lagopus workshop@Internet weekのそば
by
Yoshihiro Nakajima
PDF
NFVとその周辺の話題
by
Takanari Konishi
PDF
Cloudstack networking の内側
by
Hiroaki Kawai
PPTX
OpenStack Congress Deep Dive
by
masahito12
PDF
[D20] 高速Software Switch/Router 開発から得られた高性能ソフトウェアルータ・スイッチ活用の知見 (July Tech Fest...
by
Tomoya Hibi
PDF
高速にコンテナを起動できるイメージフォーマット
by
Akihiro Suda
PPTX
DeNA private cloudのその後 #denatechcon
by
DeNA
OpenStack Vancouver Summit Report presented at nttgroup meeting in Japanese
by
Toshikazu Ichikawa
openstack_neutron-ovs_osc2014tf_20141019
by
Takehiro Kudou
Network as a Service - Data plane evolution and abstraction by NSM
by
Miya Kohno
シスコ装置を使い倒す!組込み機能による可視化からセキュリティ強化
by
シスコシステムズ合同会社
openstack_neutron-dvr_os5thaniv_20150713
by
Takehiro Kudou
OpenStack入門 2016/06/10
by
株式会社 NTTテクノクロス
20131211 Neutron Havana
by
Akihiro Motoki
データが覗いたOpenStack Summit Vancouver
by
Kentaro Takeda
DeNA private cloud のその後 - OpenStack最新情報セミナー(2017年3月)
by
VirtualTech Japan Inc.
「Neutronになって理解するOpenStack Network」~Neutron/Open vSwitchなどNeutronと周辺技術の解説~ - ...
by
VirtualTech Japan Inc.
OPNFV Summit Feedback - OpenStack最新情報セミナー 2017年7月
by
VirtualTech Japan Inc.
OpenStack Summit November 2014 Paris出張報告
by
Mitsuhiro SHIGEMATSU
OpenStack超入門シリーズ いまさら聞けないNeutronの使い方
by
Toru Makabe
Lagopus workshop@Internet weekのそば
by
Yoshihiro Nakajima
NFVとその周辺の話題
by
Takanari Konishi
Cloudstack networking の内側
by
Hiroaki Kawai
OpenStack Congress Deep Dive
by
masahito12
[D20] 高速Software Switch/Router 開発から得られた高性能ソフトウェアルータ・スイッチ活用の知見 (July Tech Fest...
by
Tomoya Hibi
高速にコンテナを起動できるイメージフォーマット
by
Akihiro Suda
DeNA private cloudのその後 #denatechcon
by
DeNA
More from NTT Communications Technology Development
PDF
クラウドを最大限活用するinfrastructure as codeを考えよう
by
NTT Communications Technology Development
PPTX
【たぶん日本初導入!】Azure Stack Hub with GPUの性能と機能紹介
by
NTT Communications Technology Development
PDF
macOSの仮想化技術について ~Virtualization-rs Rust bindings for virtualization.framework ~
by
NTT Communications Technology Development
PPTX
マルチクラウドでContinuous Deliveryを実現するSpinnakerについて
by
NTT Communications Technology Development
PPTX
Argo CDについて
by
NTT Communications Technology Development
PDF
SpinnakerとKayentaで 高速・安全なデプロイ!
by
NTT Communications Technology Development
PDF
100Gbps OpenStack For Providing High-Performance NFV
by
NTT Communications Technology Development
PDF
Can we boost more HPC performance? Integrate IBM POWER servers with GPUs to O...
by
NTT Communications Technology Development
PDF
AWS re:Invent2017で見た AWSの強さとは
by
NTT Communications Technology Development
PDF
分散トレーシング技術について(Open tracingやjaeger)
by
NTT Communications Technology Development
PDF
NTT Tech Conference #2 - closing -
by
NTT Communications Technology Development
PPTX
イケてない開発チームがイケてる開発を始めようとする軌跡
by
NTT Communications Technology Development
PDF
SpinnakerとOpenStackの構築
by
NTT Communications Technology Development
PPTX
Web rtc for iot, edge computing use cases
by
NTT Communications Technology Development
クラウドを最大限活用するinfrastructure as codeを考えよう
by
NTT Communications Technology Development
【たぶん日本初導入!】Azure Stack Hub with GPUの性能と機能紹介
by
NTT Communications Technology Development
macOSの仮想化技術について ~Virtualization-rs Rust bindings for virtualization.framework ~
by
NTT Communications Technology Development
マルチクラウドでContinuous Deliveryを実現するSpinnakerについて
by
NTT Communications Technology Development
Argo CDについて
by
NTT Communications Technology Development
SpinnakerとKayentaで 高速・安全なデプロイ!
by
NTT Communications Technology Development
100Gbps OpenStack For Providing High-Performance NFV
by
NTT Communications Technology Development
Can we boost more HPC performance? Integrate IBM POWER servers with GPUs to O...
by
NTT Communications Technology Development
AWS re:Invent2017で見た AWSの強さとは
by
NTT Communications Technology Development
分散トレーシング技術について(Open tracingやjaeger)
by
NTT Communications Technology Development
NTT Tech Conference #2 - closing -
by
NTT Communications Technology Development
イケてない開発チームがイケてる開発を始めようとする軌跡
by
NTT Communications Technology Development
SpinnakerとOpenStackの構築
by
NTT Communications Technology Development
Web rtc for iot, edge computing use cases
by
NTT Communications Technology Development
OpenStack Summit Tokyo 興味をひいたセッション
1.
2015年11月 NTTコミュニケーションズ 技術開発部 OpenStack Summit 2015
Tokyo 興味をひいたセッション Copyright © NTT Communications Corporation. All right reserved.
2.
Copyright © NTT
Communications Corporation. All right reserved. 自己紹介 🔸名前 三井貴之 🔸経歴 ・2015.5~ NTTCOM 技術開発部 クラウドコアTU OpenStack team 1
3.
Copyright © NTT
Communications Corporation. All right reserved. このセッションを紹介します 1. OpenStack Trivia 2. I Can’t Ping My VM! Learn How to Debug Neutron and Solve Common Problems 2
4.
Copyright © NTT
Communications Corporation. All right reserved. Trivia 3 https://www.youtube.com/watch?v=5uGIV6RKoTw
5.
Copyright © NTT
Communications Corporation. All right reserved. 発表者紹介 4 David Medberry - Time Warner Cable - OpenStack Community leader for 4+ years 「Frisbee thrower as long as I can remember...」
6.
Copyright © NTT
Communications Corporation. All right reserved. トリビアがいっぱいある 5 https://www.youtube.com/watch?v=5uGIV6RKoTw
7.
Copyright © NTT
Communications Corporation. All right reserved. 誰? 6 https://www.youtube.com/watch?v=5uGIV6RKoTw
8.
Copyright © NTT
Communications Corporation. All right reserved. Principal Enginner 7 https://www.youtube.com/watch?v=5uGIV6RKoTw
9.
Copyright © NTT
Communications Corporation. All right reserved. このオプションを使うのは? OpenStackのaffiliated service で、 次のオプションを使うものは? --yes-i-really-really-mean-it 8
10.
Copyright © NTT
Communications Corporation. All right reserved. CEPHだそうです 既存ストレージプールを削除するときに 使用 #ceph osd delete {pool-name} [{pool- name} --yes-i-really-really-mean-it] 9
11.
Copyright © NTT
Communications Corporation. All right reserved. What summit introduced DevStack? 10 DevStackが紹介されたSummitは? https://www.youtube.com/watch?v=5uGIV6RKoTw
12.
Copyright © NTT
Communications Corporation. All right reserved. BOSTON, 2011 11 https://www.youtube.com/watch?v=5uGIV6RKoTw
13.
Copyright © NTT
Communications Corporation. All right reserved. First Two subproject? OpenStackサブプロジェクトで、 一番目と2番目は? 12 https://www.youtube.com/watch?v=5uGIV6RKoTw
14.
Copyright © NTT
Communications Corporation. All right reserved. Nova&Swfit 13 最初にNova,Swift 次にglance
15.
Copyright © NTT
Communications Corporation. All right reserved. 地名 地名がついたプロジェクトは? 14
16.
Copyright © NTT
Communications Corporation. All right reserved. 地名がついたプロジェクト Sahara サハラ砂漠 Oslo ノルウェー王国首都 Murano ヴェネツィアにある島 Manila フィリピン共和国首都 Kolla ノルウェー南部の山 15
17.
Copyright © NTT
Communications Corporation. All right reserved. このセッションを紹介します 1. OpenStack Trivia 2. I Can’t Ping My VM! Learn How to Debug Neutron and Solve Common Problems 16
18.
Copyright © NTT
Communications Corporation. All right reserved. 発表者紹介 Rossella Sblendido Software Engineer, SUSE Neutron Core Reviewer 17
19.
Copyright © NTT
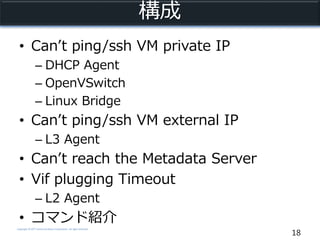
Communications Corporation. All right reserved. 構成 • Can’t ping/ssh VM private IP – DHCP Agent – OpenVSwitch – Linux Bridge • Can’t ping/ssh VM external IP – L3 Agent • Can’t reach the Metadata Server • Vif plugging Timeout – L2 Agent • コマンド紹介 18
20.
Copyright © NTT
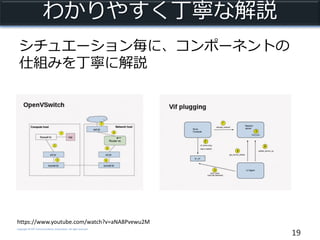
Communications Corporation. All right reserved. わかりやすく丁寧な解説 シチュエーション毎に、コンポーネントの 仕組みを丁寧に解説 19 https://www.youtube.com/watch?v=aNA8Pvewu2M
21.
Copyright © NTT
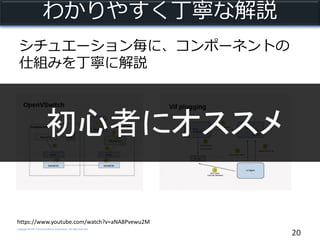
Communications Corporation. All right reserved. わかりやすく丁寧な解説 シチュエーション毎に、コンポーネントの 仕組みを丁寧に解説 20 https://www.youtube.com/watch?v=aNA8Pvewu2M 初心者にオススメ
22.
Copyright © NTT
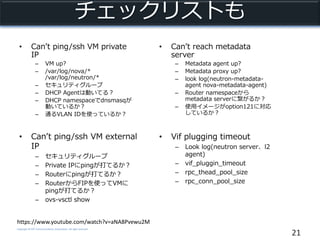
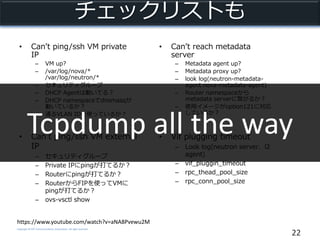
Communications Corporation. All right reserved. チェックリストも • Can’t ping/ssh VM private IP – VM up? – /var/log/nova/* /var/log/neutron/* – セキュリティグループ – DHCP Agentは動いてる? – DHCP namespaceでdnsmasqが 動いているか? – 通るVLAN IDを使っているか? 21 https://www.youtube.com/watch?v=aNA8Pvewu2M • Can’t ping/ssh VM external IP – セキュリティグループ – Private IPにpingが打てるか? – Routerにpingが打てるか? – RouterからFIPを使ってVMに pingが打てるか? – ovs-vsctl show • Can’t reach metadata server – Metadata agent up? – Metadata proxy up? – look log(neutron-metadata- agent nova-metadata-agent) – Router namespaceから metadata serverに繋がるか? – 使用イメージがoption121に対応 しているか? • Vif plugging timeout – Look log(neutron server、l2 agent) – vif_pluggin_timeout – rpc_thead_pool_size – rpc_conn_pool_size
23.
Copyright © NTT
Communications Corporation. All right reserved. チェックリストも • Can’t ping/ssh VM private IP – VM up? – /var/log/nova/* /var/log/neutron/* – セキュリティグループ – DHCP Agentは動いてる? – DHCP namespaceでdnsmasqが 動いているか? – 通るVLAN IDを使っているか? 22 https://www.youtube.com/watch?v=aNA8Pvewu2M • Can’t ping/ssh VM external IP – セキュリティグループ – Private IPにpingが打てるか? – Routerにpingが打てるか? – RouterからFIPを使ってVMに pingが打てるか? – ovs-vsctl show • Can’t reach metadata server – Metadata agent up? – Metadata proxy up? – look log(neutron-metadata- agent nova-metadata-agent) – Router namespaceから metadata serverに繋がるか? – 使用イメージがoption121に対応 しているか? • Vif plugging timeout – Look log(neutron server、l2 agent) – vif_pluggin_timeout – rpc_thead_pool_size – rpc_conn_pool_size Tcpdump all the way
24.
Copyright © NTT
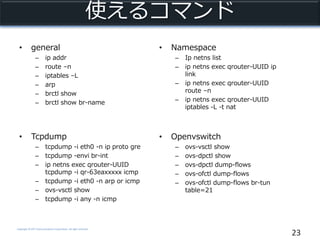
Communications Corporation. All right reserved. 使えるコマンド 23 • general – ip addr – route –n – iptables –L – arp – brctl show – brctl show br-name • Tcpdump – tcpdump -i eth0 -n ip proto gre – tcpdump -envi br-int – ip netns exec qrouter-UUID tcpdump -i qr-63eaxxxxx icmp – tcpdump -i eth0 -n arp or icmp – ovs-vsctl show – tcpdump -i any -n icmp • Namespace – Ip netns list – ip netns exec qrouter-UUID ip link – ip netns exec qrouter-UUID route –n – ip netns exec qrouter-UUID iptables -L -t nat • Openvswitch – ovs-vsctl show – ovs-dpctl show – ovs-dpctl dump-flows – ovs-ofctl dump-flows – ovs-ofctl dump-flows br-tun table=21
25.
Copyright © NTT
Communications Corporation. All right reserved. 詳細はYoutubeで 24 1. OpenStack Trivia https://www.youtube.com/watch?v=5uGIV 6RKoTw 2. I Can’t Ping My VM! https://www.youtube.com/watch?v= aNA8Pvewu2M
Download


![Copyright © NTT Communications Corporation. All right reserved.
CEPHだそうです
既存ストレージプールを削除するときに
使用
#ceph osd delete {pool-name} [{pool-
name} --yes-i-really-really-mean-it]
9](https://image.slidesharecdn.com/openstack-summit-tokyo20151125-151127062036-lva1-app6891/85/OpenStack-Summit-Tokyo-10-320.jpg)






























































![[D20] 高速Software Switch/Router 開発から得られた高性能ソフトウェアルータ・スイッチ活用の知見 (July Tech Fest...](https://cdn.slidesharecdn.com/ss_thumbnails/jtf20182-180803022253-thumbnail.jpg?width=640&height=640&fit=bounds)















