More Related Content

PDF

PDF
いろいろなデバイスでOpenVNetを動かしてみようとした。 
PDF
Docker on Mesos with OpenVNet 
PDF

PPTX
【第11回 クラウドごった煮(コンテナ勉強会)】Docker networking tools 
PPTX

PDF

PDF
What's hot

PPTX
ネットワークプログラマビリティ勉強会 これまでのおさらい 
PPTX
パブリッククラウドConoHaを使ってOpenStack APIを理解する 
PDF
OpenVNet Updates 2013/11 in TremaDay#04 
PDF
OpenVNet at Vyatta Users Group 
PDF
Wakame-vnet / Open Source Project for Virtual Network & SDN 
PPTX
ConoHaオブジェクトストレージ 利用ケース 
PPTX
OpenStack管理者入門 - OpenStack最新情報セミナー 2014年12月 
PDF

PPTX
VMwareユーザのためのdocker入門 ~Re:Virtualization Night #1~ 
PDF
OpenStack Liberty 外部ネットワーク側との通信 
PPTX
Cloudstack Day 2014 ここまできた、VSC for ACSが�実現する先進的なプライベートクラウド 
PDF
高スループットなサーバアプリケーションの為の新しいフレームワーク
「Seastar」 
PPTX

PDF
OpenContrail Users Event at OpenStack Summit Paris 行ってきました 
PPTX
Dockerと外部ルータを連携させる仕組みを作ってみた 
PDF

PPTX

PPTX
Seastar in 歌舞伎座.tech#8「C++初心者会」 
PPTX

PDF
Viewers also liked

PDF

PDF
エンジニアなら知っておきたい「仮想マシン」のしくみ v1.1 (hbstudy 17) 
PDF

PDF

PDF
Openstack Neutron and SDN 
PDF

KEY

PDF
OpenStack Neutron Tutorial 
DOC

PPTX
Kauno miesto savivaldybės 100 dienų ataskaita 
PDF
Google analytics konferenz gtm hands on alkan_cem_webalytics 
PDF
Kuidas Targad Juhid Tegutsevad 2007 
PDF
Doing Terrifying Things - Nati Cohen, Similarweb - DevOpsDays Tel Aviv 2016 
PDF
Homoeopathic Home Prescribing Class 18th October 2014 
PDF

PDF
Parenting education for better care of children (Pictorial Guidebook) 
ODP
Depurando Aplicacoes PHP com XDebug e FirePHP II 
PDF
Virtualni svet Second Life 
PPSX
Como realizar un plan de clases 
PDF
Similar to OpenStack Kuryrについて

PDF

PDF
Neutron Icehouse Update (Japanese) 
PDF
「Neutronになって理解するOpenStack Network」~Neutron/Open vSwitchなどNeutronと周辺技術の解説~ - ... 
PDF

PPTX
Openstack neutron vtjseminar_20160302 
PDF
20161129 neutron recent topic 
PDF
20150713-OpenStack-5thbirthday-kilo-liberty-and-towards 
PDF
OpenStack Neutronの機能概要 - OpenStack最新情報セミナー 2014年12月 
PDF
オーバーレイネットワークで実現するプライベートクラウド -OpenStack/OpenContrailを用いたプライベートクラウドの構築及び評価計画のご紹介- 
PDF
20131011_openstack-neutron-vyattameeting 
PDF
OpenStack Vancouver Summit Report presented at nttgroup meeting in Japanese 
PPTX
OpenStack Project Update Neutron Update 
PDF
知っているようで知らないNeutron -仮想ルータの冗長と分散- - OpenStack最新情報セミナー 2016年3月 
PPTX
Odl beryllium20160227-novideo 
PDF
20130724 openstack-3rd-anniversary-amotoki 
PDF
OpenStack Atlanta Summit Report: Neutron, Nova and design summit sessions 
PDF
Open Source Study Session #3 
PDF
RDOを使ったOpenStack Havana - Neutron 構築編 :補足資料 
PDF
エンジニア向け夏期特別講座 〜 Red Hat OpenStack徹底解説! 第二部 OpenStackの内部構造 
PDF
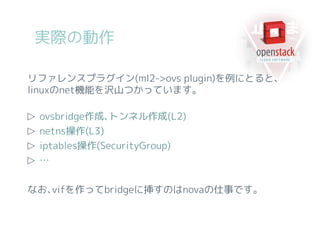
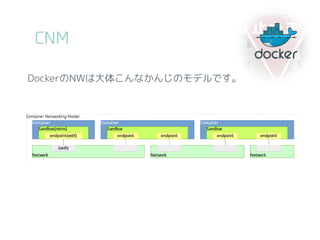
OpenStack Kuryrについて
- 1.
- 2.
- 3.
- 4.
- 5.
- 6.
- 7.
- 8.
- 9.
- 10.
- 11.
- 12.
- 13.
- 14.