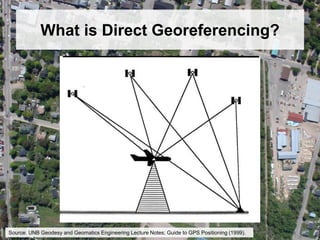
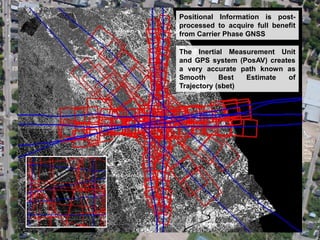
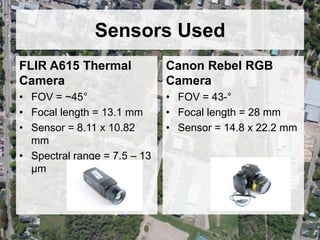

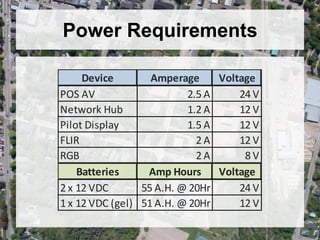

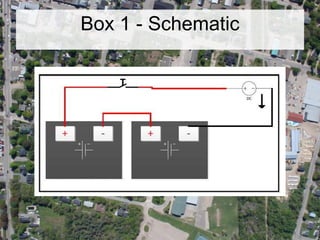



















The document outlines a remote project focused on developing an open-source direct georeferencing thermal camera, managed by a team led by James Thompson and Steven Aucoin. It details the technical specifications of the sensors used, the positioning equipment, and the software development necessary for the project, emphasizing the importance of pre-flight planning and integration of data. Preliminary results show successful operation with adequate power supply and functioning software, while future applications are suggested.






























































![Tango[VivekKumar_CS-C_6Sem_MIT]](https://cdn.slidesharecdn.com/ss_thumbnails/5eec082a-161b-4406-a530-3c6159865bb5-160831171410-thumbnail.jpg?width=640&height=640&fit=bounds)