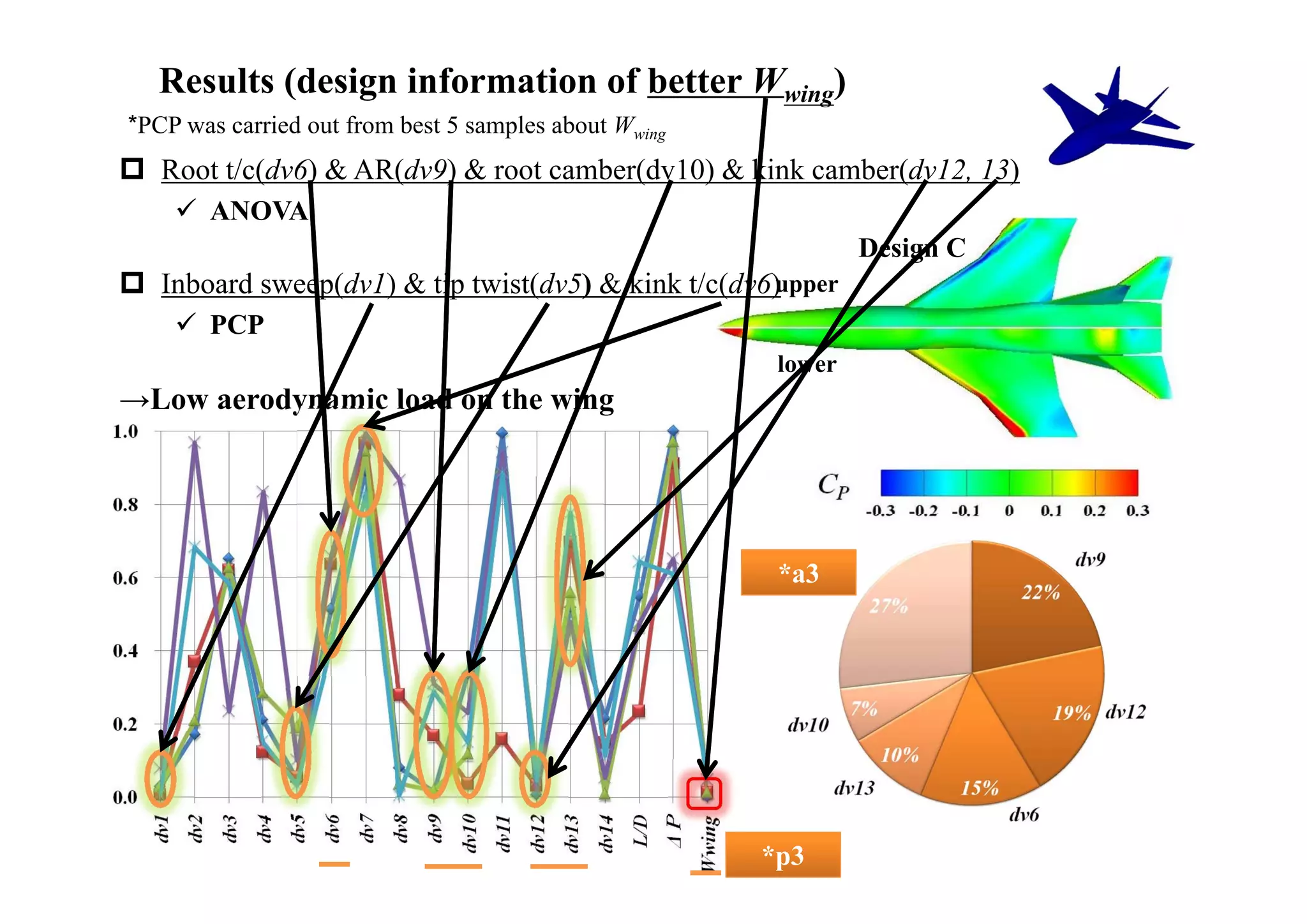
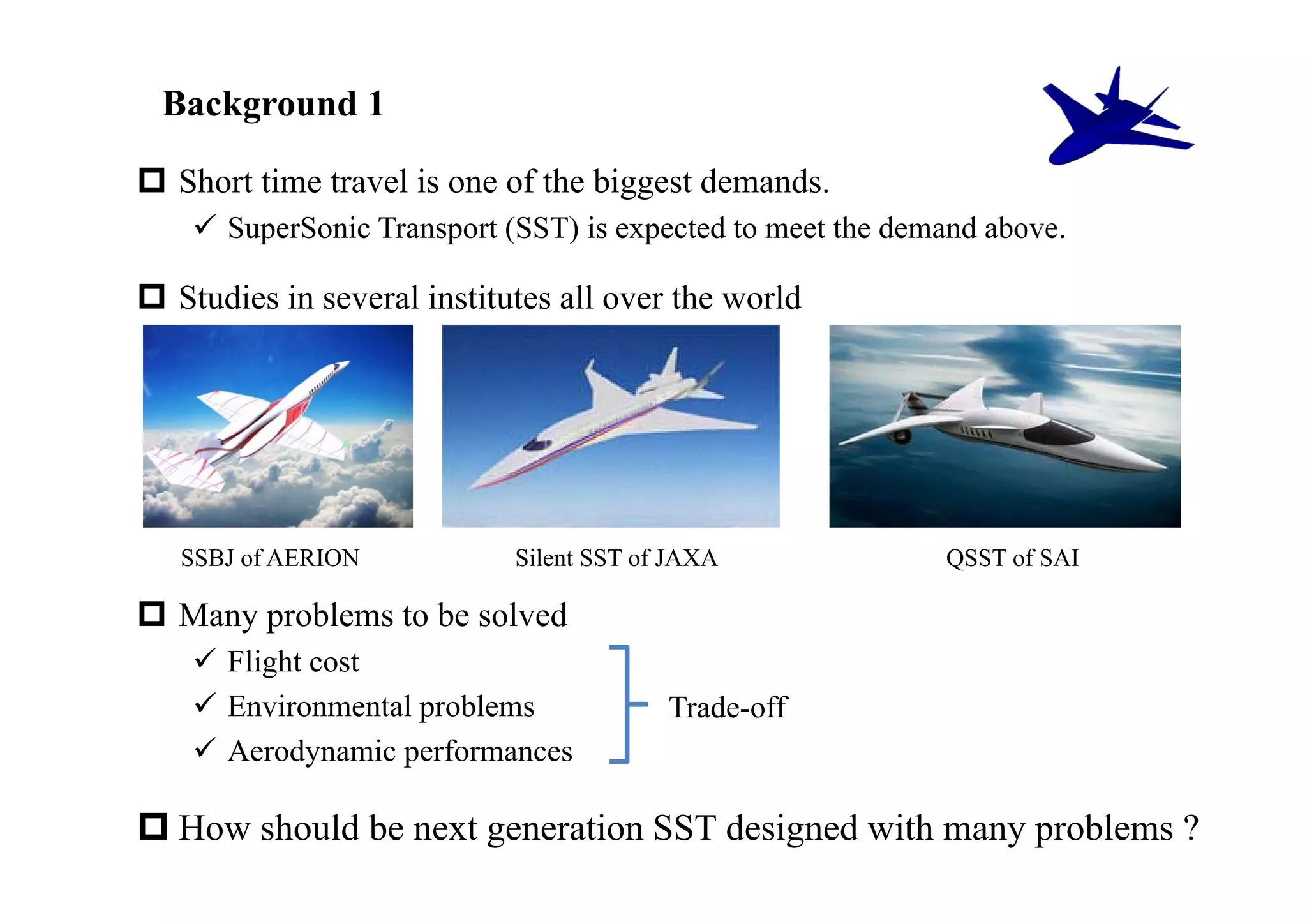
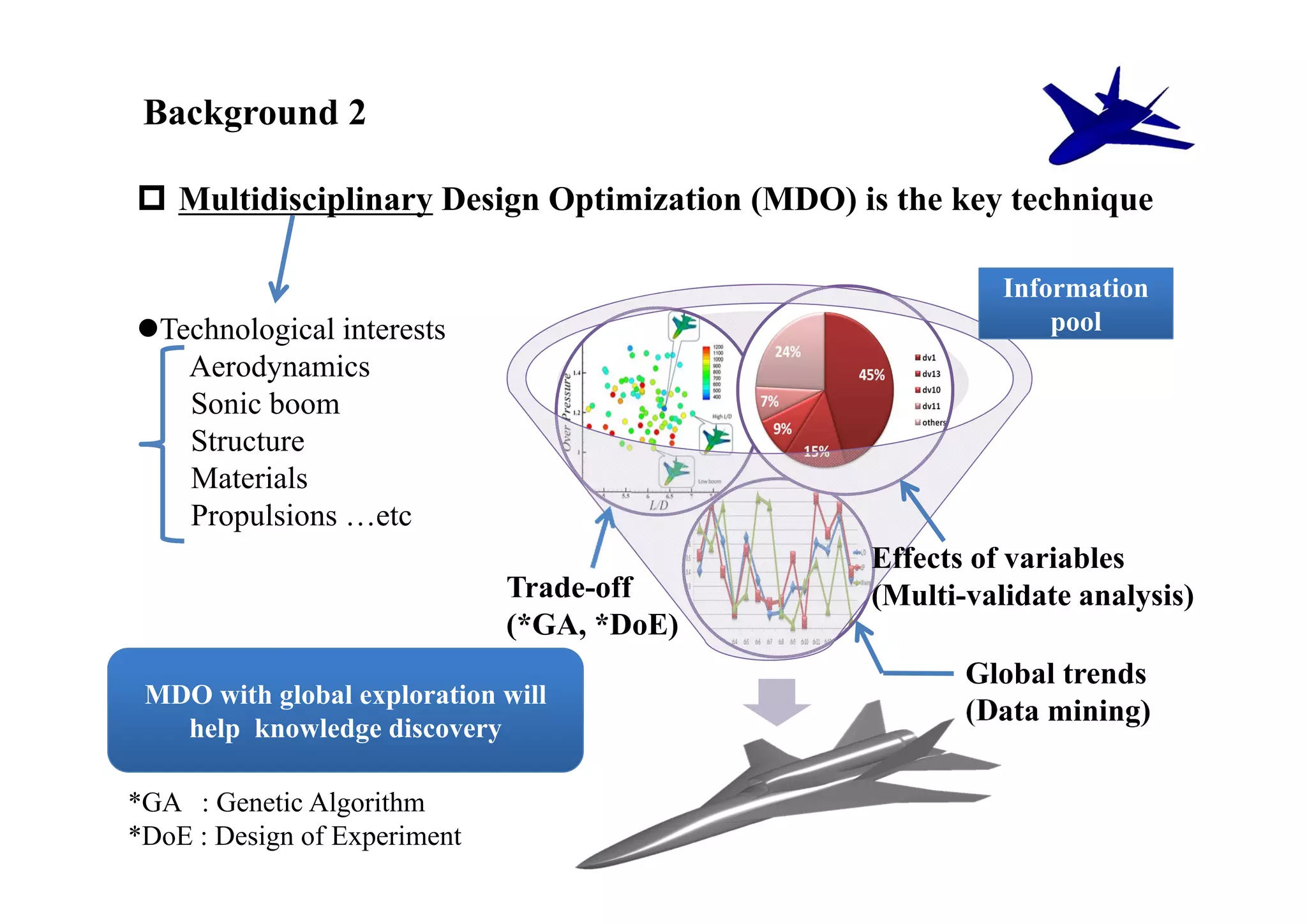
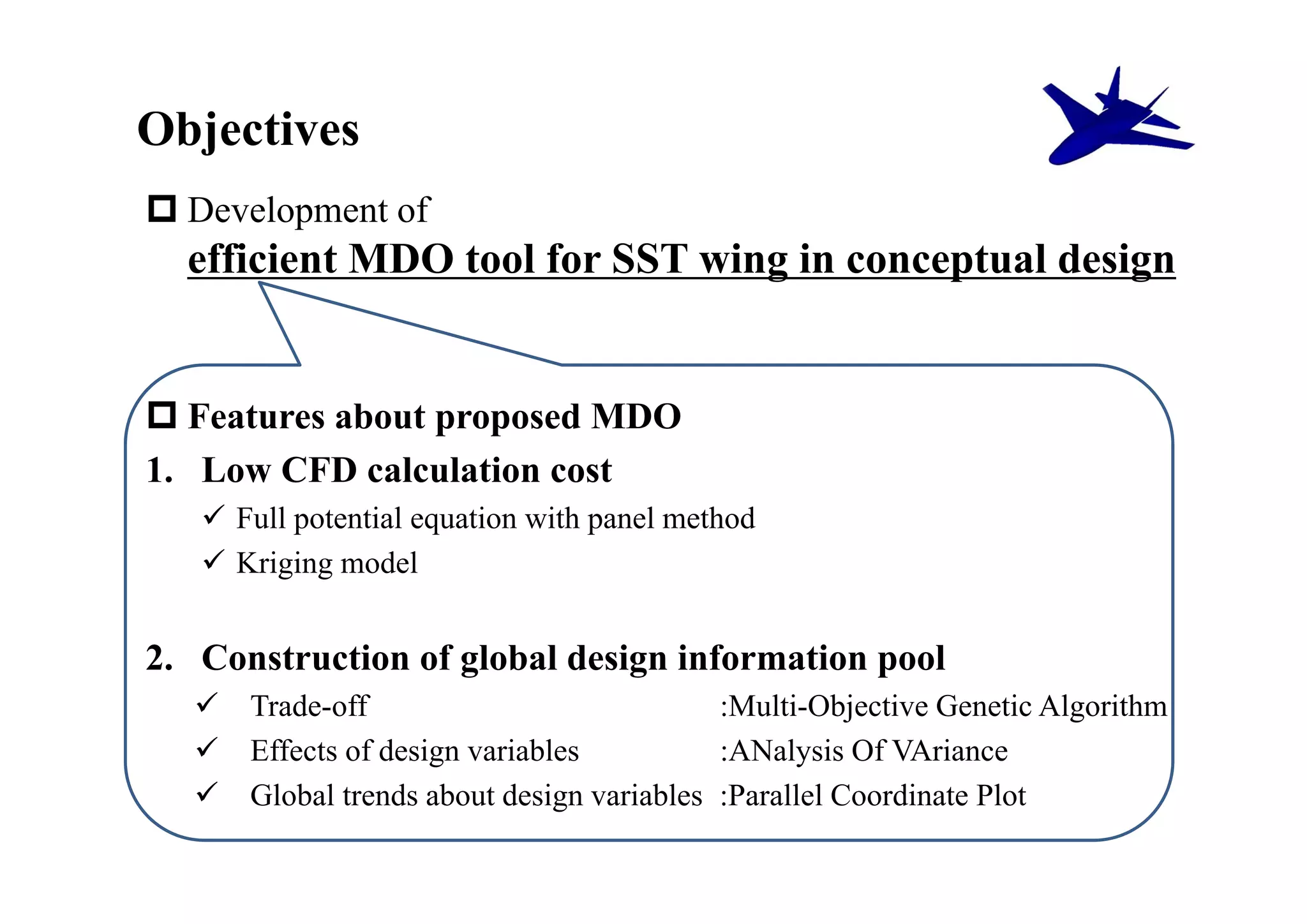
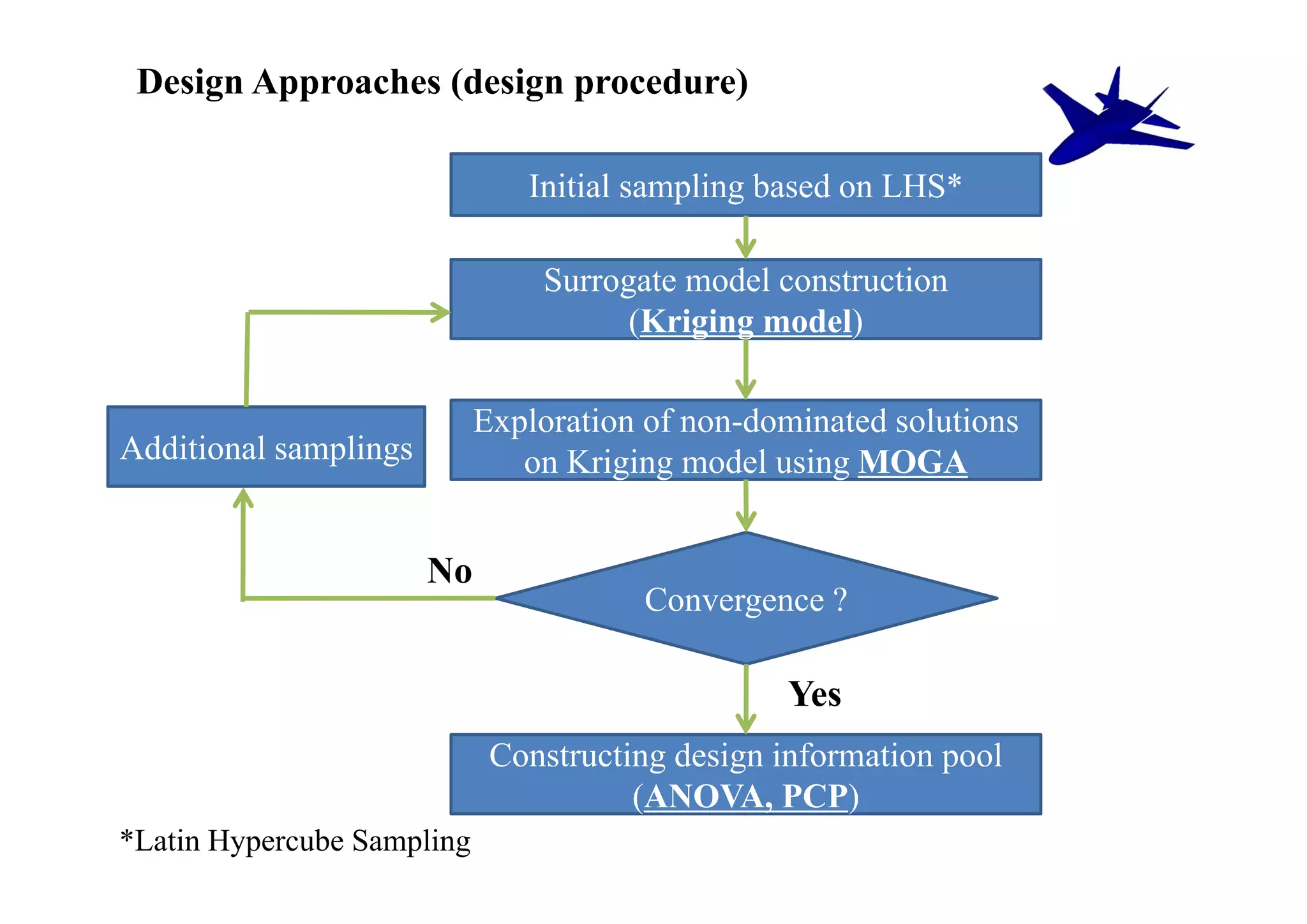
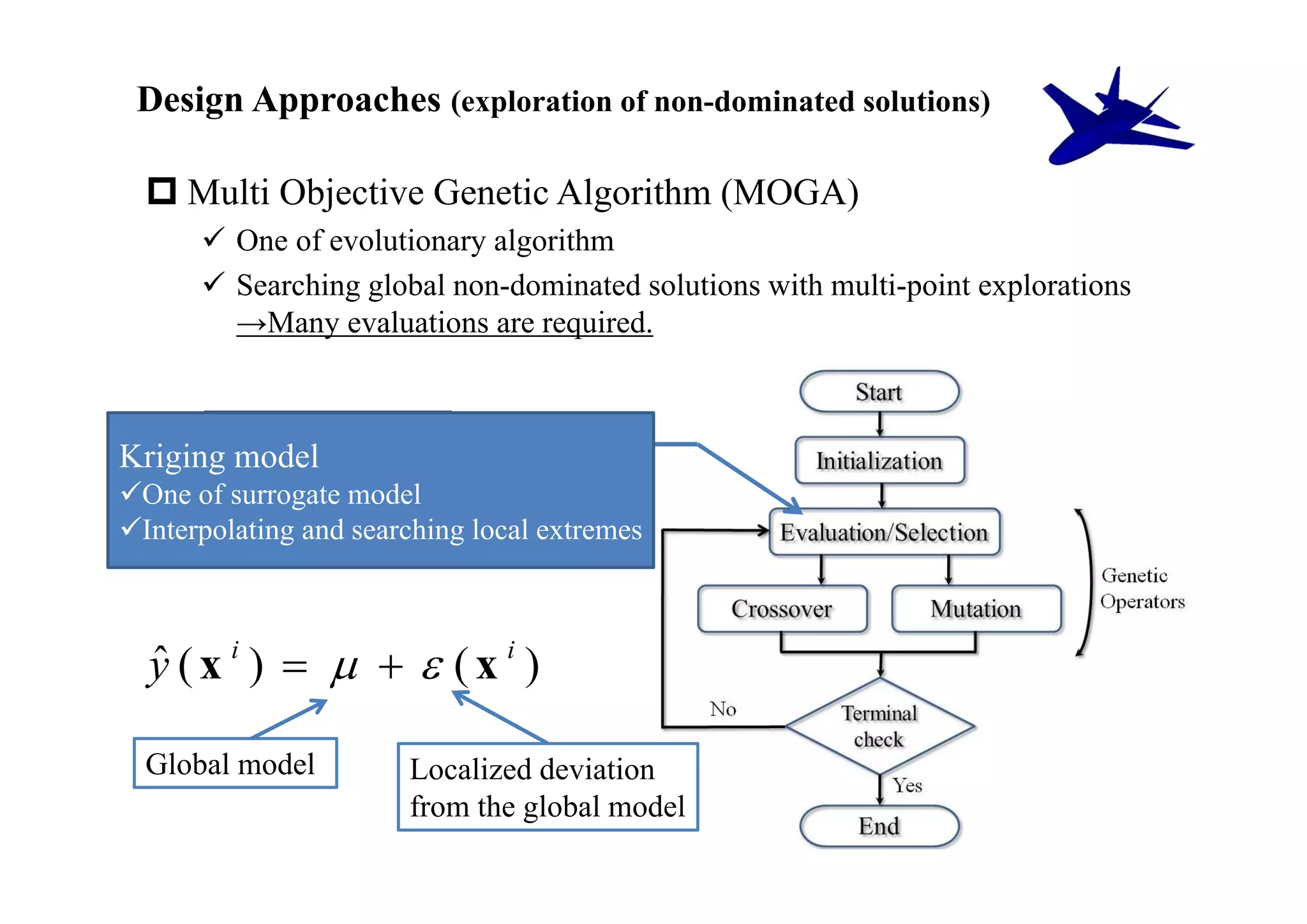
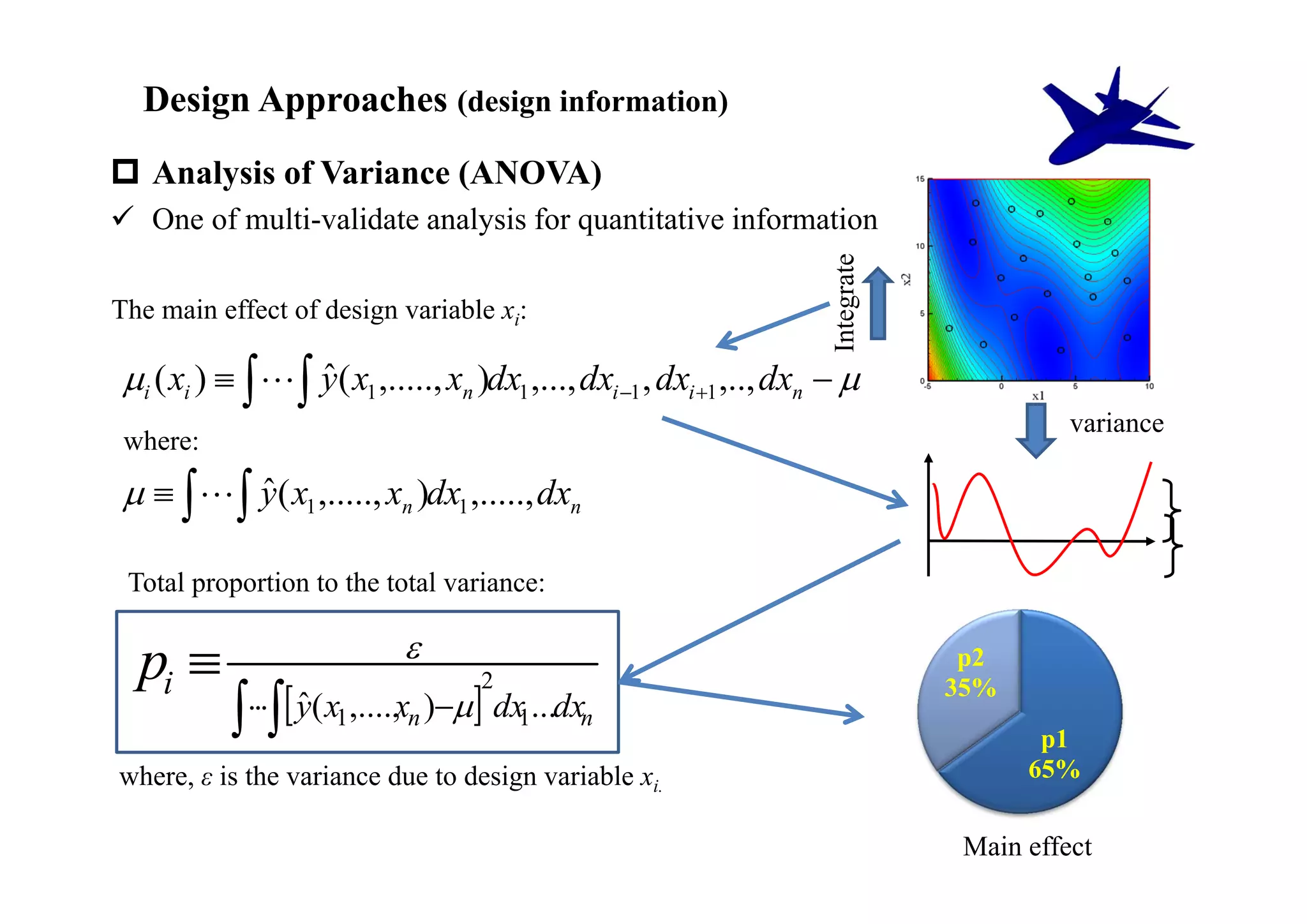
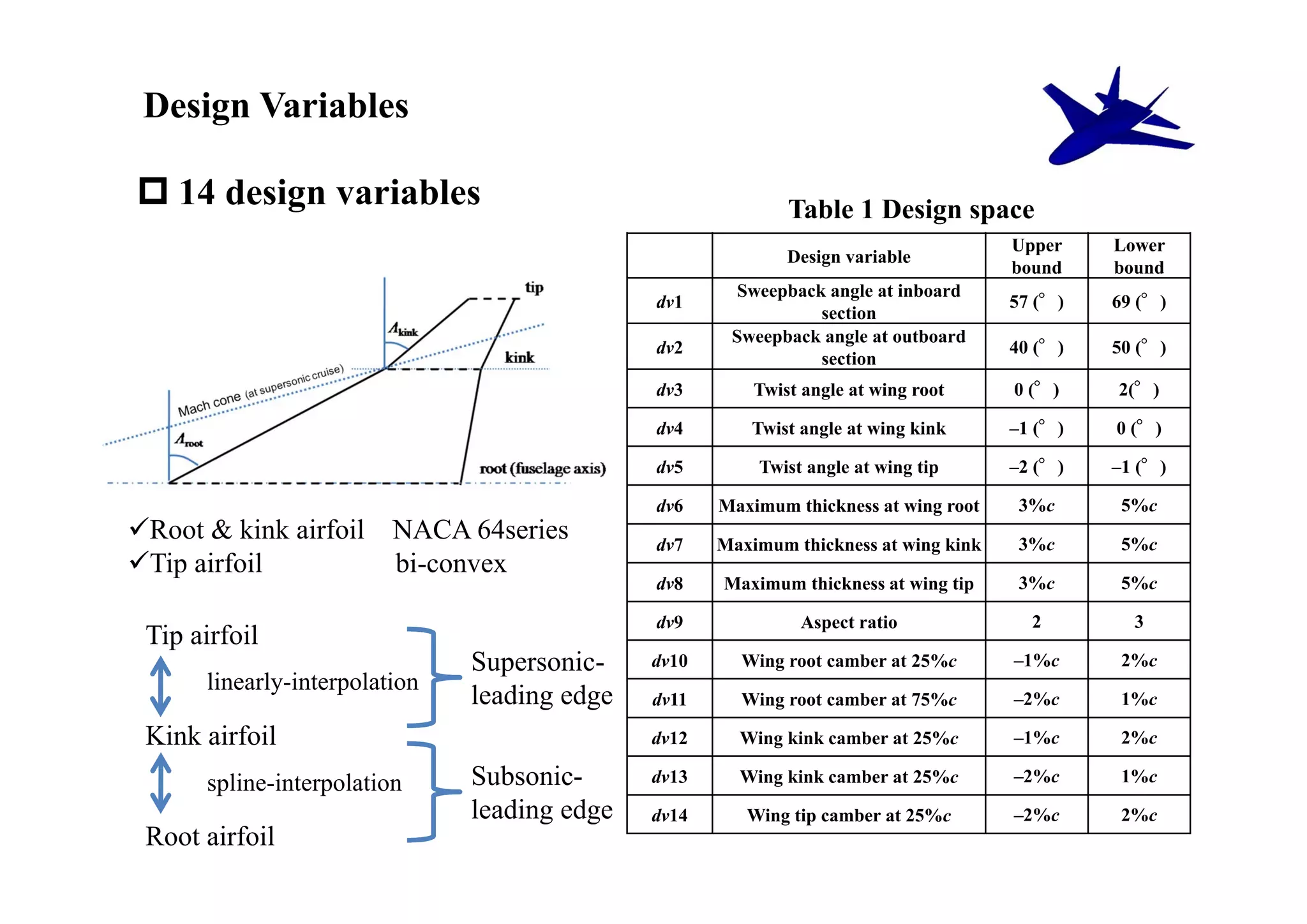
The document summarizes research on the multidisciplinary design optimization of supersonic transport wing concepts. The objectives were to develop an efficient MDO tool for conceptual design of SST wings using low-cost computational fluid dynamics and surrogate modeling. 107 design samples were evaluated for aerodynamic performance, sonic boom levels, and wing weight. 24 non-dominated solutions were identified, with the best designs having thinner root airfoils, larger inboard sweep angles, or modified tail angles compared to a baseline compromised design. Analysis of variance identified key design variables with the most influence on objectives.

![Objective Functions
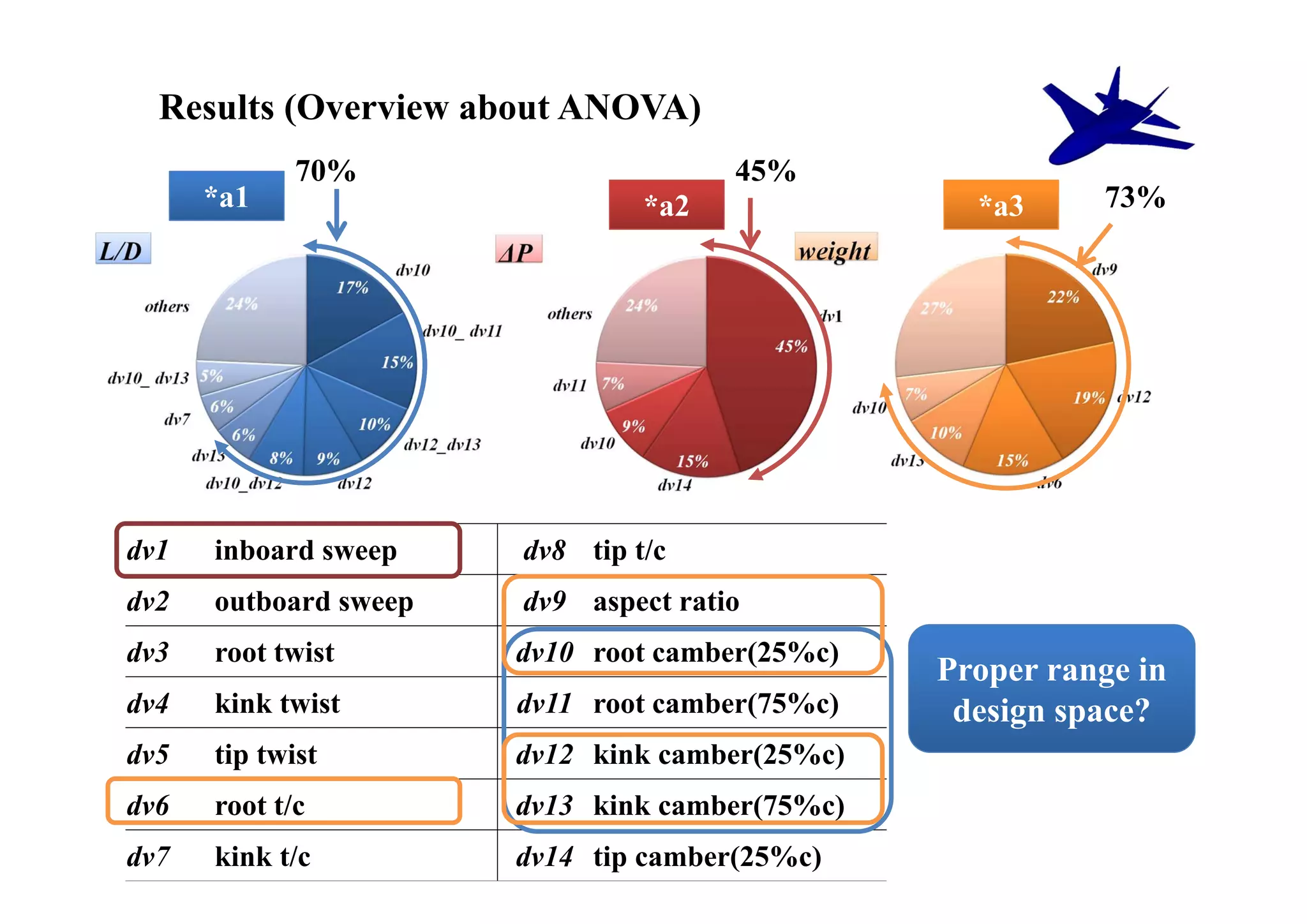
Three objective functions in this study
maximize L/ D
minimize ΔP (On boom carpet)
ΔP
minimize Wwing
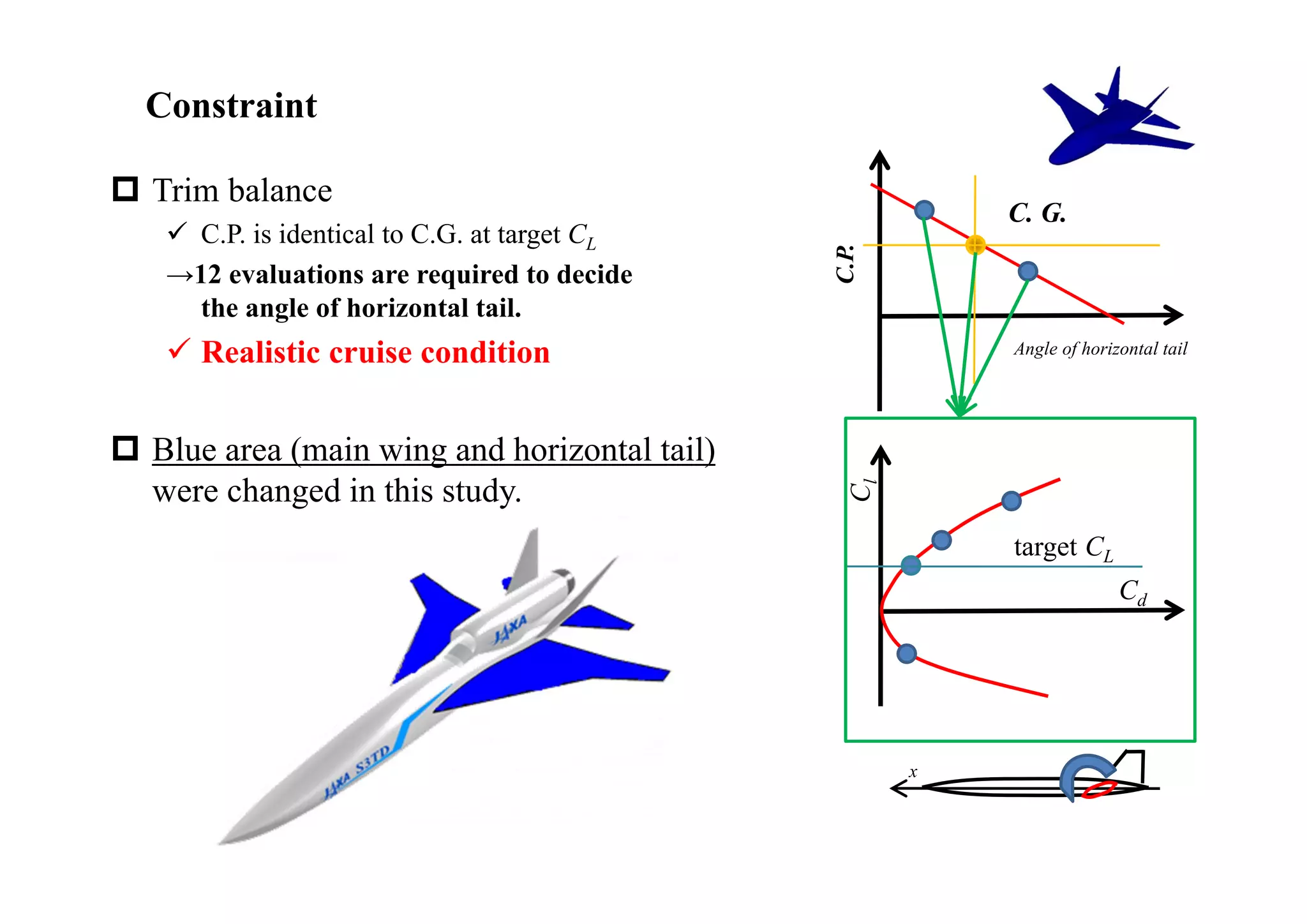
subject to Design C L = 0.105
Time[ms]
maximize
K-means method
ˆ - L / Dmax
y ˆ - L / Dmax
y
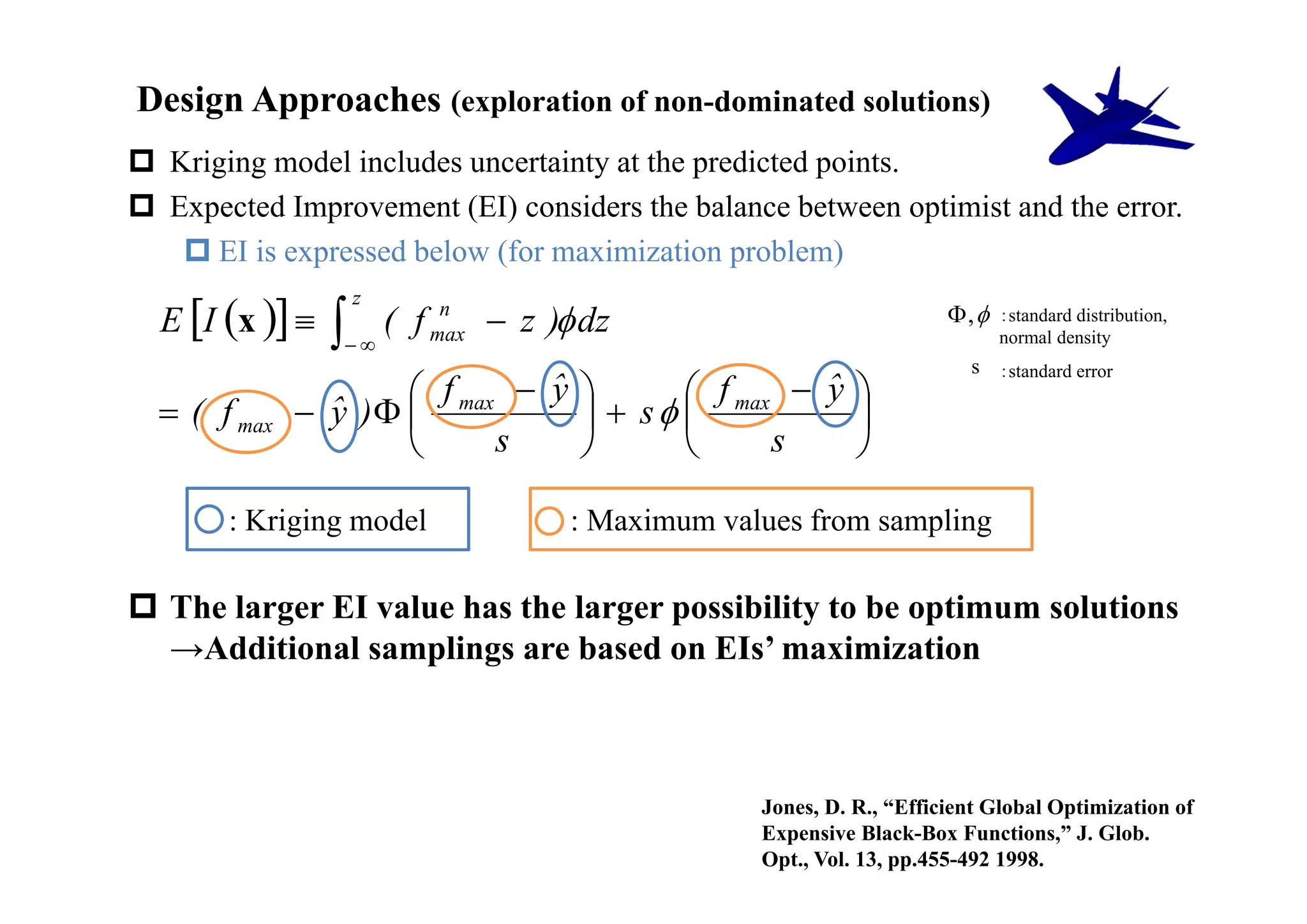
• EIL / D = ( ˆ - L / Dmax )Φ(
y ) + sφ( ) Additional sampling points
s s
maximize
clusters
ΔP - ˆ y ΔP - ˆ y
EI1
• EIΔP = ( ΔP - y
min
ˆ )Φ( min ) + sφ( min )
s s
maximize
Wwingmin ˆy Wwingmin - ˆ
y EI2
• EIWwing = (Wwingmin - ˆ )Φ(
y ) + sφ( )
s s](https://image.slidesharecdn.com/icas2010setonaotofinal-121129200956-phpapp02/75/Multidisciplinary-Design-Optimization-of-Supersonic-Transport-Wing-Using-Surrogate-Model-16-2048.jpg)
![Evaluations of L/D and ΔP
CAPAS* developed in JAXA
Aerodynamic performance Sonic-boom intensity
Compressible potential equation Correction of shock wave
with panel method (PANAIR) by Whitham’s theory
2 2 2 PANAIR data
2 F ( x) CP
( M 1) 2
2
2
0 2
x y z
x
1 r F x
: Velocity potential
2 3
Thomas’s waveform parameter
method
M 2-1
pressure[psf]
1.4
Computational CP distributions r : propagation distance
geometry
Time[ms]
*CAPAS (CAD-based Automatic Panel Analysis System)](https://image.slidesharecdn.com/icas2010setonaotofinal-121129200956-phpapp02/75/Multidisciplinary-Design-Optimization-of-Supersonic-Transport-Wing-Using-Surrogate-Model-17-2048.jpg)
![Evaluation of wing weight
Inboard wing (multi-frame structure)
Aluminum material
Minimum thickness of skin & frame (0<thickness<20mm, every0.1mm)
Outboard wing (full-depth honeycomb sandwich structure)
Composite material
Stack sequence
Fiber angle θ ; [0/ θ/- θ/90] ns, θ=15, 30, 45, 60, 70deg
Number of laminations n n N 25
Solver is MSC NASTRAN 2005R (FEM model)
Strength requirements
Aluminum material:Mises stress < 200MPa at all FEM nodes
Composite material: Destruction criteria < 1 at all FEM nodes on each laminate
Computational conditions
Symmetrical maneuver +6G, Safety rate: 1.25 PANAIR data
Estimated load on the main wing
(symmetrical maneuver) × (safety rate) × (aerodynamics load)](https://image.slidesharecdn.com/icas2010setonaotofinal-121129200956-phpapp02/75/Multidisciplinary-Design-Optimization-of-Supersonic-Transport-Wing-Using-Surrogate-Model-18-2048.jpg)
![Results (solution space about objective functions)
Wwing
24 non-dominated solutions from L/D ΔP[psf] AoA
[kg]
final data Design A 7.02 1.19 612 2.5
Most of additional samplings formed Design B 6.08 0.97 502 2.7
non-dominated solutions Design C 5.60 1.53 276 2.6
Design D 6.77 1.09 691 2.6
Design A (best L/D) Design B (best ΔP) Design C (best Wwing)
Design D (compromised)
Wwing[kg]
ΔP[psf]
Optimum direction
L/D ΔP[psf]](https://image.slidesharecdn.com/icas2010setonaotofinal-121129200956-phpapp02/75/Multidisciplinary-Design-Optimization-of-Supersonic-Transport-Wing-Using-Surrogate-Model-22-2048.jpg)
![Evaluation of wing weight evaluations
Inboard wing (multi-frame structure)
Aluminum material
Minimum thickness of skin & frame (0<thickness<20mm, every0.1mm)
Outboard wing (full-depth honeycomb sandwich structure)
Composite material
Stack sequence
Fiber angle θ ; [0/ θ/- θ/90] ns, θ=15, 30, 45, 60, 70deg
Number of laminations n n N 25
Solver is MSC NASTRAN 2005R (FEM model)
Strength requirements
Aluminum material:Mises stress < 200MPa at all FEM nodes
Composite material: Destruction criteria < 1 at all FEM nodes on each laminate
Computational conditions
Symmetrical maneuver +6G, Safety rate: 1.25 PANAIR data
Estimated load on the main wing
(symmetrical maneuver) × (safety rate) × (aerodynamics load)](https://image.slidesharecdn.com/icas2010setonaotofinal-121129200956-phpapp02/75/Multidisciplinary-Design-Optimization-of-Supersonic-Transport-Wing-Using-Surrogate-Model-24-2048.jpg)
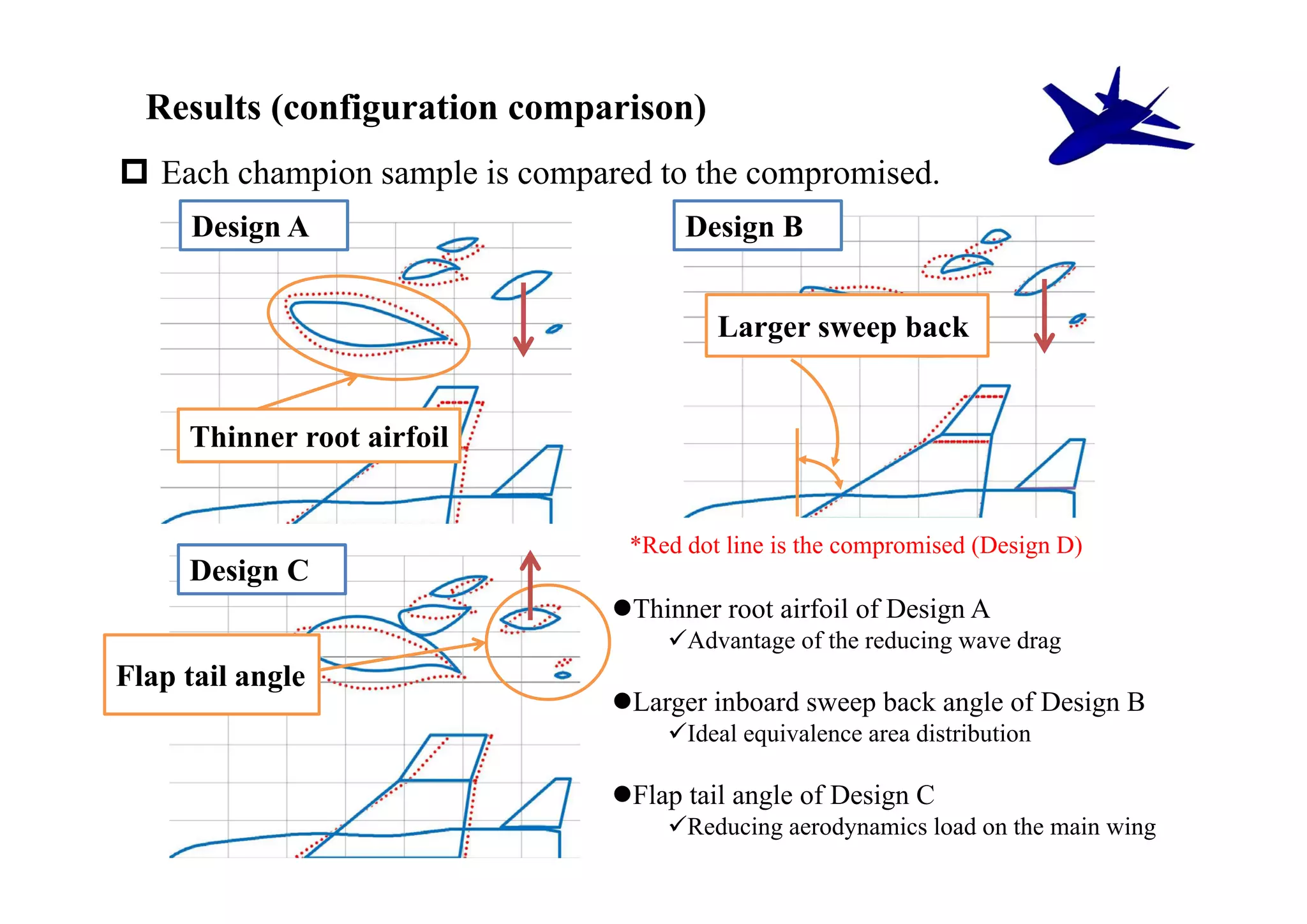
![Results (waveform on the ground)
Each champion sample is compared to the compromised.
*Red dot line is the compromised (Design D)
Less different
Design A
among Design A, B, and D
Large different
between Design C and D
L/D ΔP[psf] Wwing[kg]
Design B
Design A 7.02 1.19 612
Design B 6.08 0.97 502
Design C 5.60 1.53 276
Design D 6.77 1.09 691
Design C
Severe trade-off
between ΔP & Wwing](https://image.slidesharecdn.com/icas2010setonaotofinal-121129200956-phpapp02/75/Multidisciplinary-Design-Optimization-of-Supersonic-Transport-Wing-Using-Surrogate-Model-25-2048.jpg)