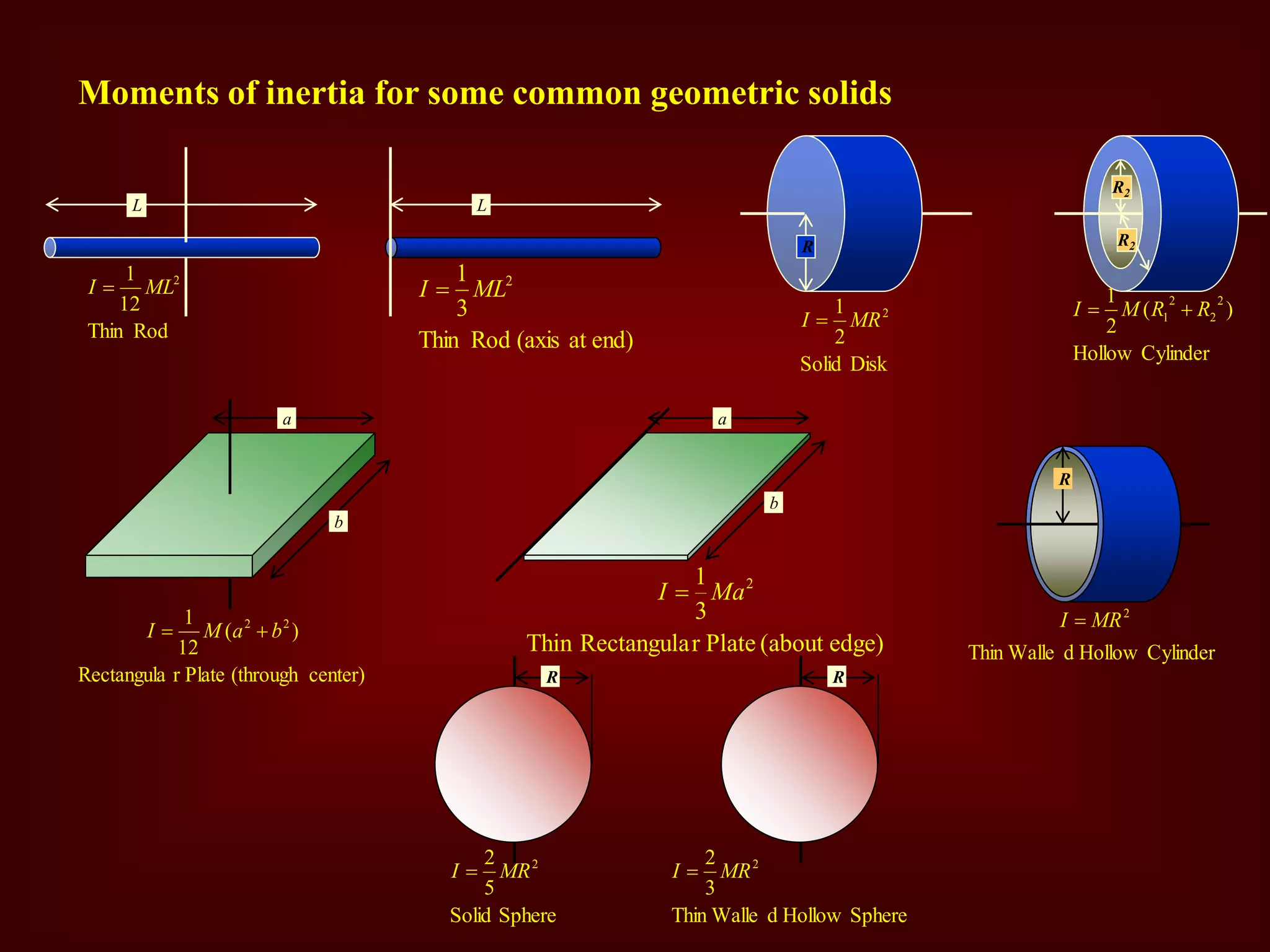
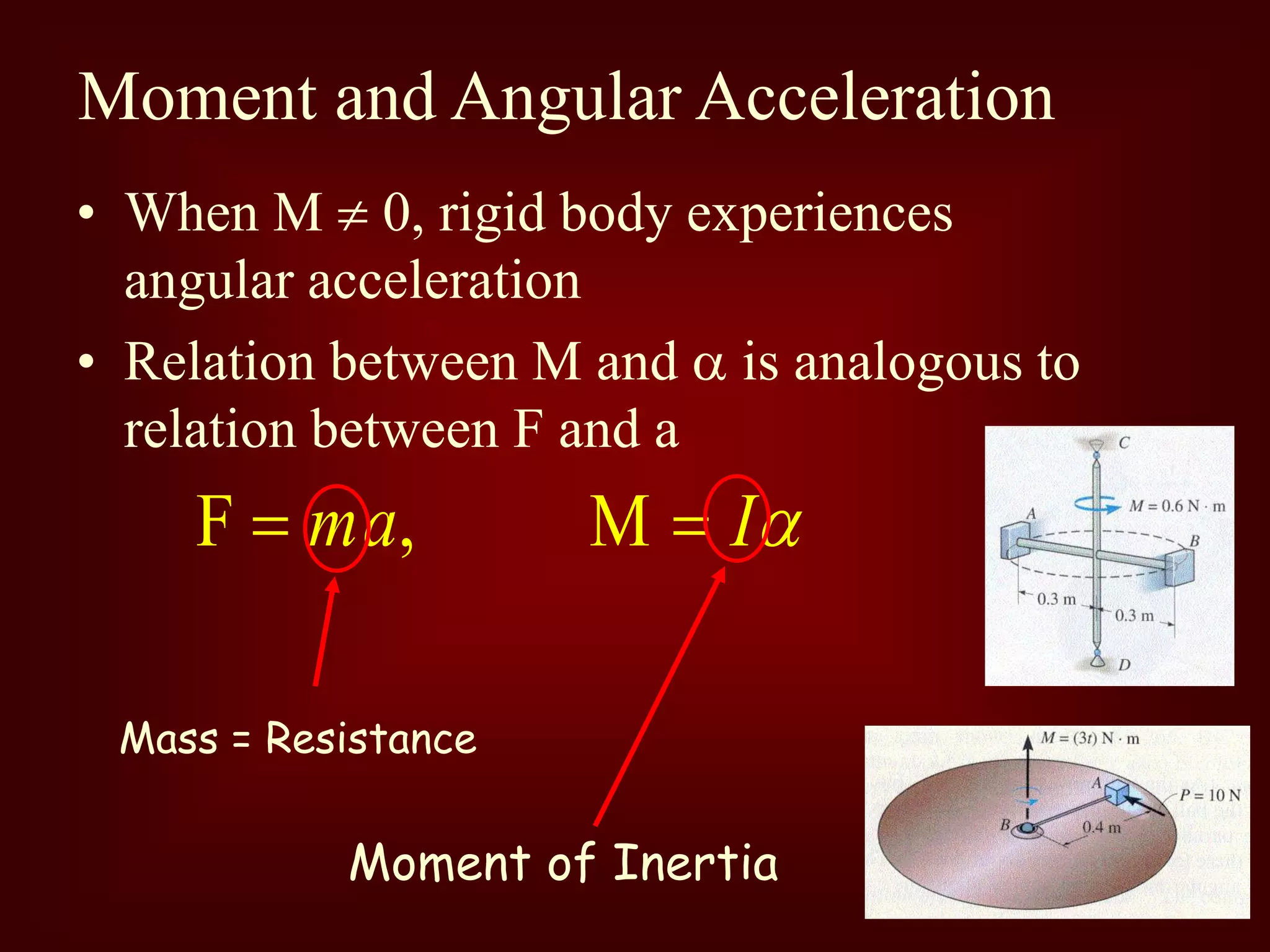
This document discusses moment of inertia, including its definition as a measure of an object's resistance to changes in angular acceleration. Key concepts covered include the parallel axis theorem, radius of gyration, calculating moments of inertia for composite bodies, and applications such as how moment of inertia affects how easily a wheel can be sped up. Formulas are provided for moments of inertia of common shapes like rods, disks, hollow cylinders, and spheres. Methods are described for finding the moment of inertia of composite objects by dividing them into simple shapes and summing the individual moments of inertia.



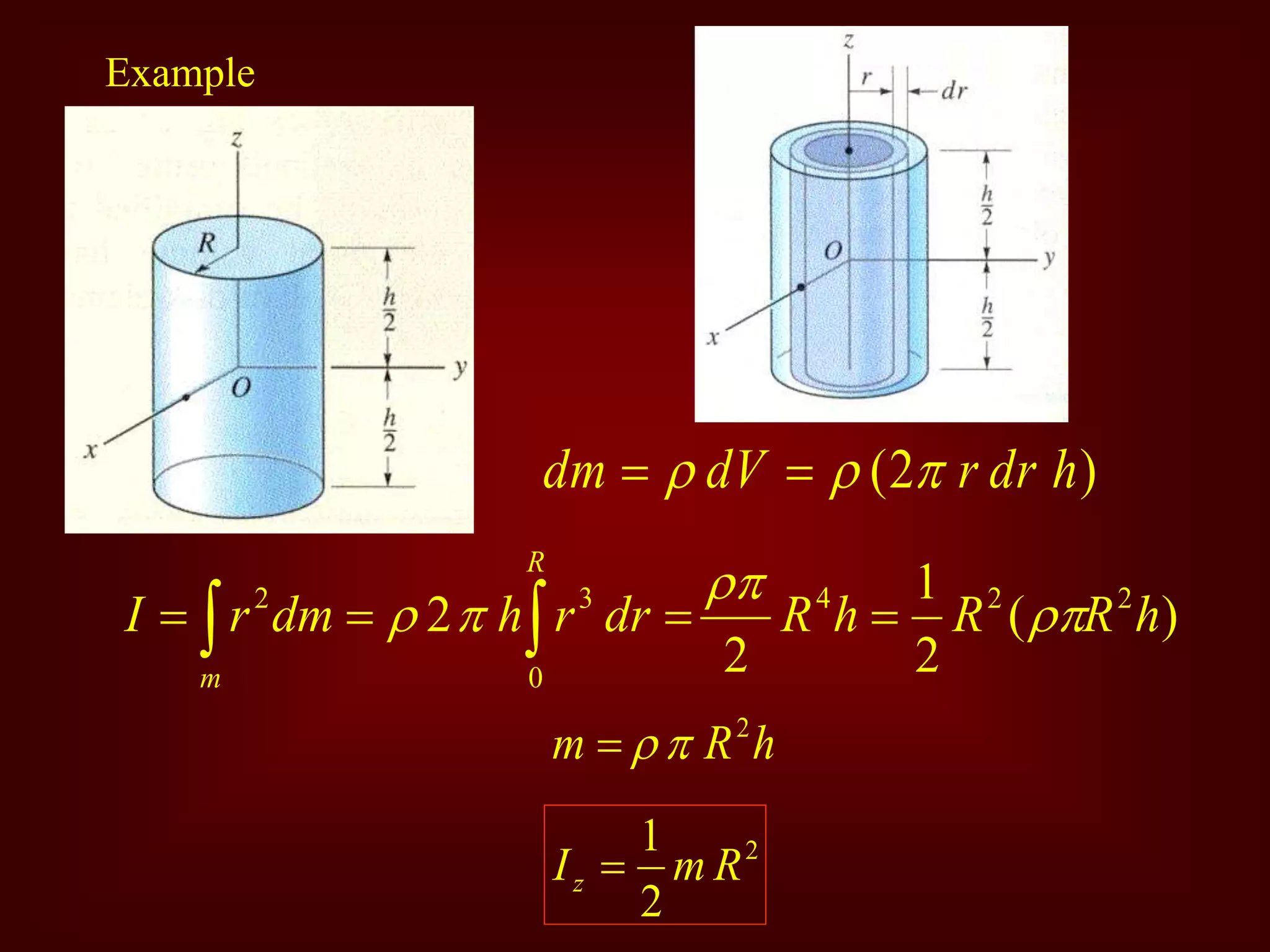
![Example
dy
x
dV
dm )
( 2
2
2
1
R
m
I
dy
x
x
dy
x
R
m
Iy
4
2
2
2
2
1
]
)
(
[
2
1
2
1
3
2
slug/ft
5
,
y
x
2
1
0
8
1
0
4
slug.ft
873
.
0
2
)
5
(
2
dy
y
dy
x
Iy
](https://image.slidesharecdn.com/6zwiqlzfssomtznnb4fr-satyam-moment-of-inertia-1-220322154217/75/moment_of_inertia-ppt-7-2048.jpg)