Download as PDF, PPTX


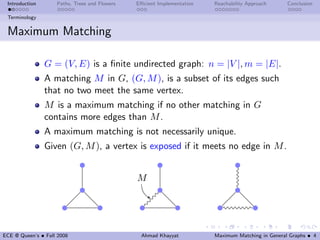

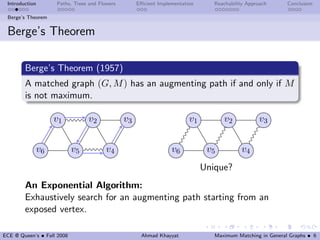


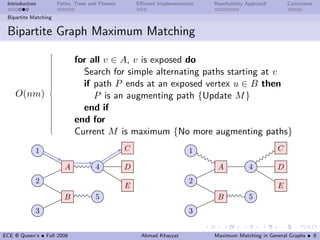









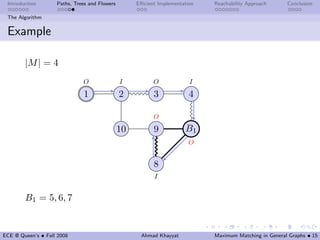























This document discusses maximum matching in general graphs, focusing on terminology, bipartite matching, and the implementation of algorithms such as Edmonds' algorithm and Gabow's algorithm. Key concepts include augmenting paths, Berge’s theorem, and the notion of blossoms, which significantly impact the efficiency of finding maximum matchings. The performance of various algorithms is also explored, with insights into their computational complexity and practical implementation results.