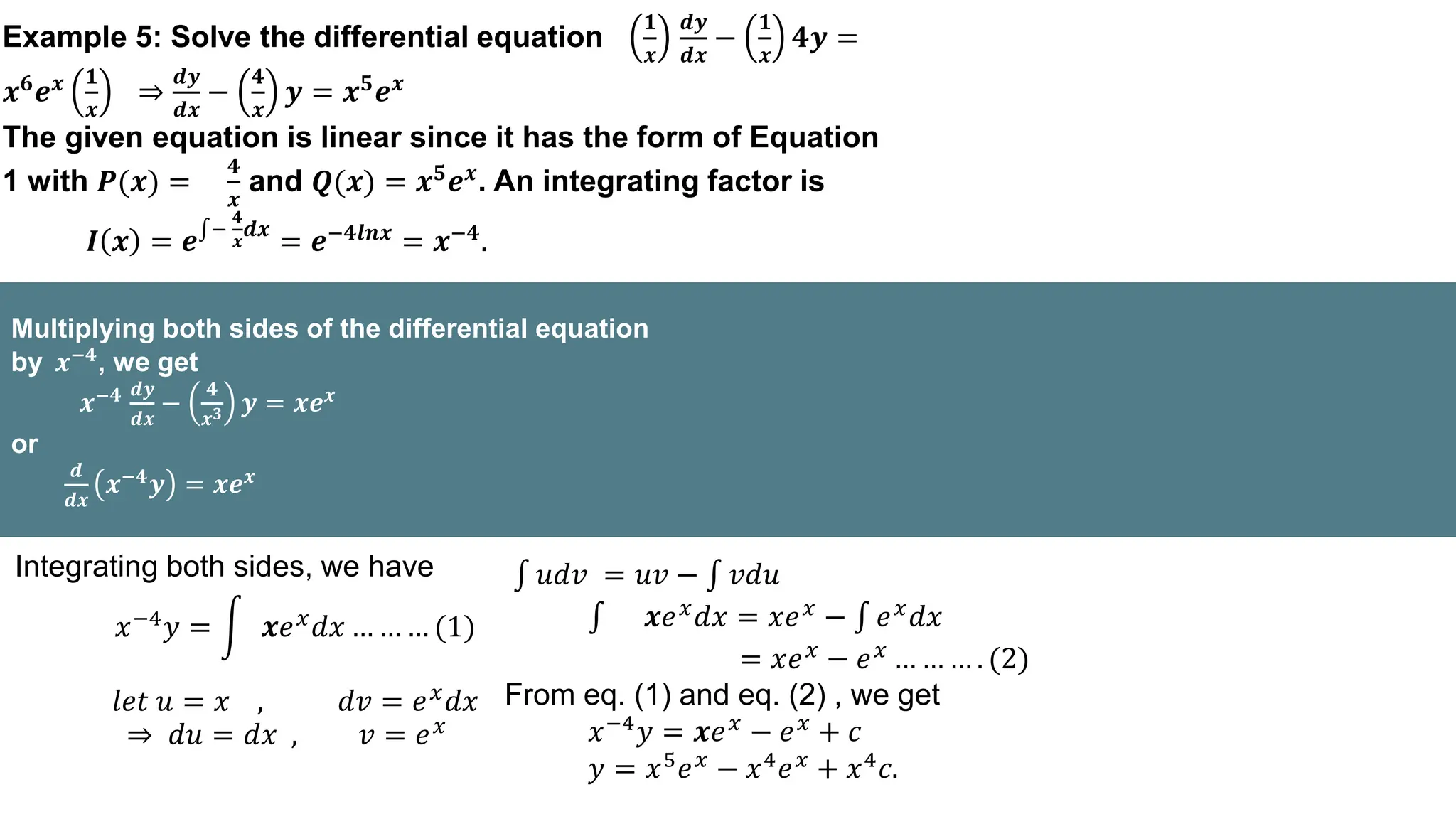
This document presents an overview of linear differential equations of the first order. It discusses the definition, general form, and solution methods like separation of variables and integrating factors. Some examples are provided to demonstrate how to solve first-order linear differential equations. Applications to areas like population growth, heat transfer, and electrical circuits are also mentioned. The goal is to provide an introduction to these fundamental equations and their use in mathematical modeling of real-world phenomena.




![4. Reference
[1] Hartman, P. (2002). Ordinary differential equations. Society for Industrial
and Applied Mathematics.
[2] Arnold, V. I. (1992). Ordinary differential equations. Springer Science &
Business Media.
[3] Miller, R. K., & Michel, A. N. (2014). Ordinary differential equations.
Academic press.
[4] Hale, J. K. (2009). Ordinary differential equations. Courier Corporation.](https://image.slidesharecdn.com/000000000000000-240216150358-ac40a7f4/75/LINEAR-DIFFERENTIAL-EQUATIONSLINEAR-DIFFERENTIAL-EQUATIONS-pptx-15-2048.jpg)















































