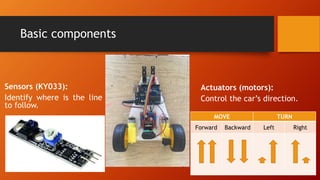
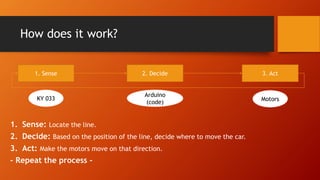
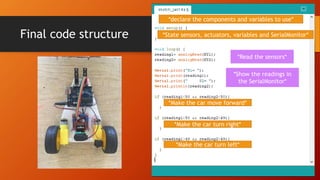
This document provides instructions for building a line-following robot car using an Arduino board. It explains that sensors are used to locate a line on the ground and the Arduino code makes the car's motors move to follow the line. The car senses the line's position with 2 front sensors, decides which way to turn based on the sensor readings, and the motors act to move the car forward or turn it left or right. The document also provides advice to test components separately before integrating everything and start with low motor speeds when testing.