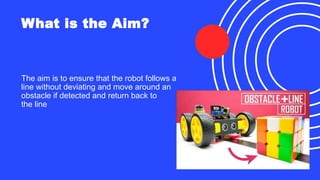
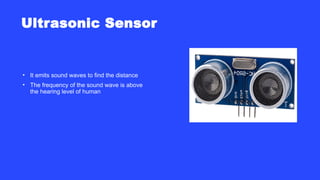
The document outlines the design and components of a line-following robot equipped with obstacle avoidance capabilities. It details the use of an Arduino Uno microcontroller, motor driver, ultrasonic and IR sensors, and a servo motor to navigate a path and circumvent obstacles. Applications for the robot include industrial goods handling and waste transportation in mining sites.