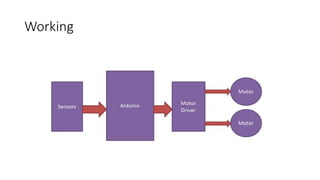
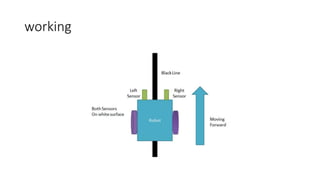
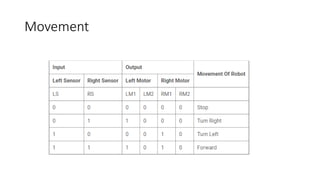
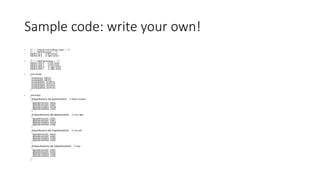
This document provides sample Arduino code for a line following robot. The code defines two sensors to detect the line on the left and right. It also defines the motors for the left and right wheels. The code uses the sensor readings to determine whether to move forward, turn right, turn left, or stop based on whether the line is detected on the left sensor, right sensor, or both. The code provides the logic to control the motor speeds and directions to achieve the desired movement and follow the line.