Download as PDF, PPTX
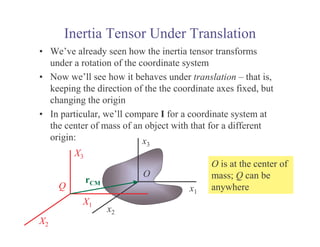
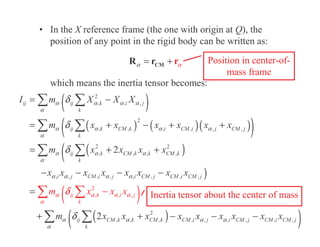
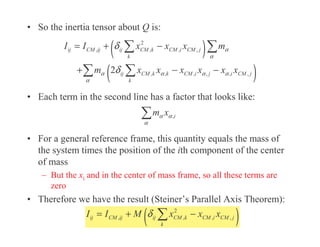
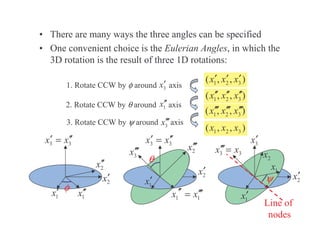
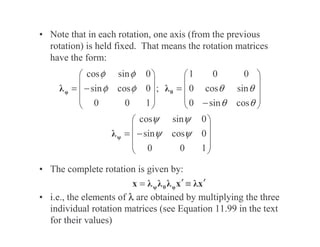
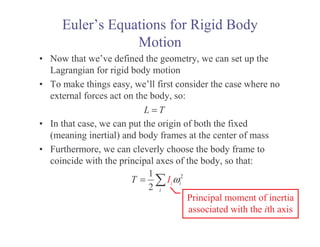
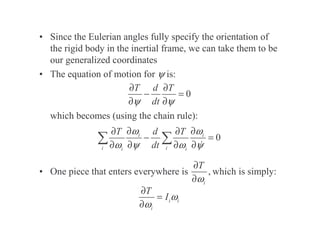

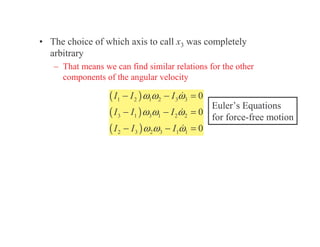

This document discusses principal axes and Eulerian angles for describing the orientation and motion of rigid bodies. It contains the following key points: 1) The principal moments and axes of an inertia tensor can always be found for real, symmetric tensors like the inertia tensor, and they will always be real values. 2) Under translation, the inertia tensor about a point not at the center of mass can be expressed in terms of the inertia tensor at the center of mass using Steiner's theorem. 3) Eulerian angles define a rotation as three successive rotations about fixed axes and can be used to relate an inertial frame to a body-fixed frame for a rigid body. 4) Euler's equations describe