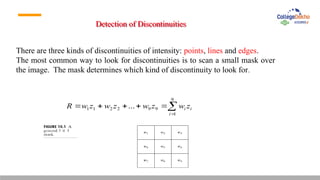
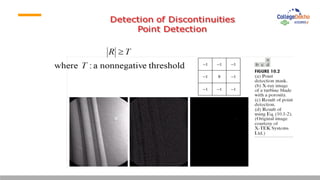
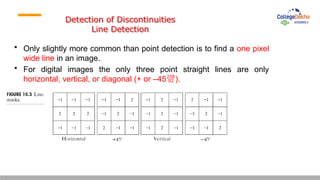
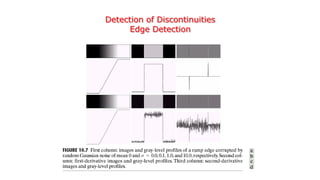
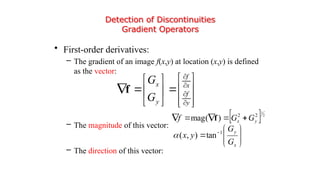
The document discusses various techniques in digital image processing, focusing on image segmentation methods such as region-based segmentation, edge detection, and gradient operators. It highlights the concepts of discontinuities in intensity and outlines algorithms for detecting edges and linking them based on gradient magnitude and direction. Additionally, it covers the use of masks like Sobel and Prewitt for effective edge detection.