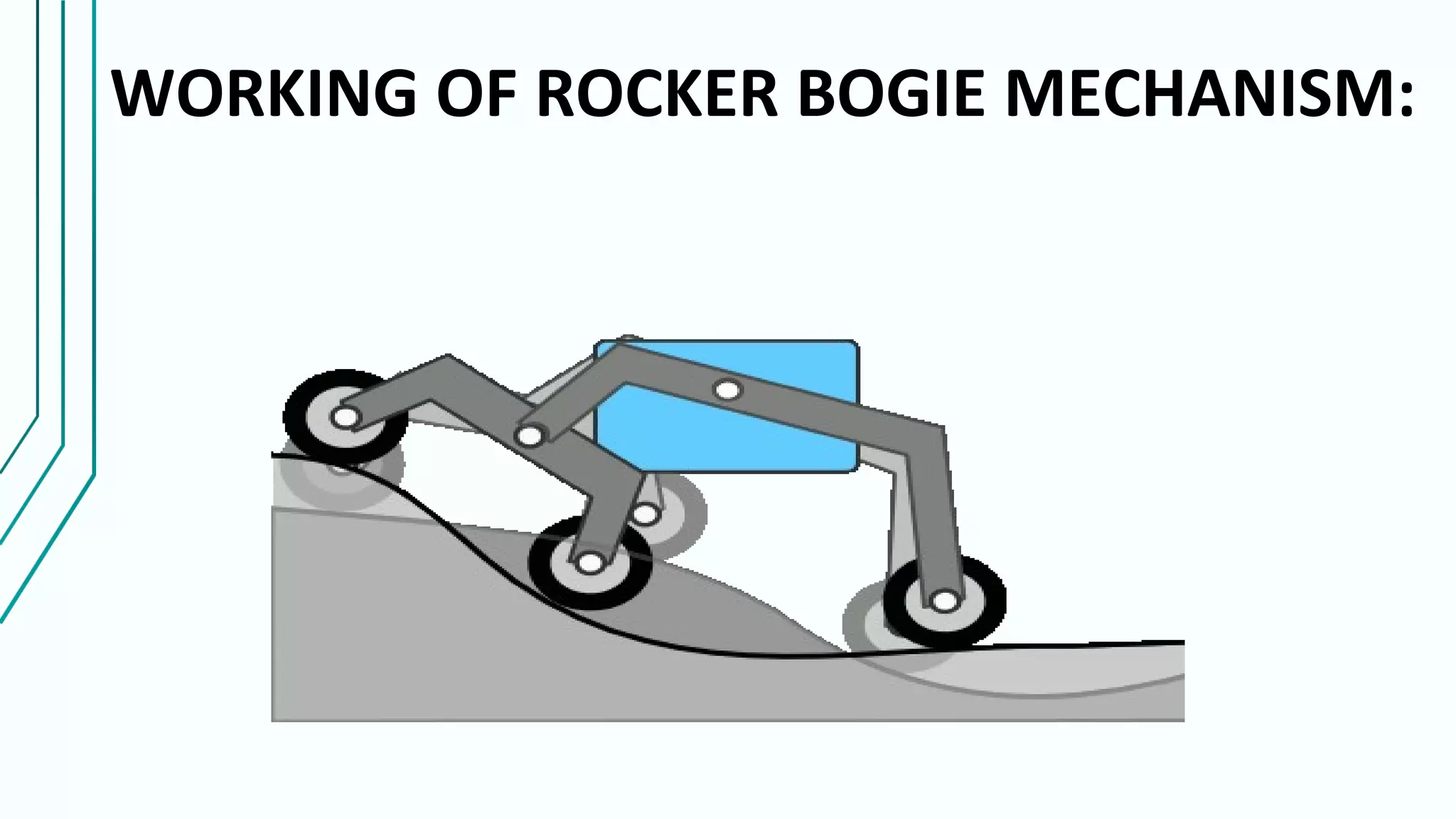
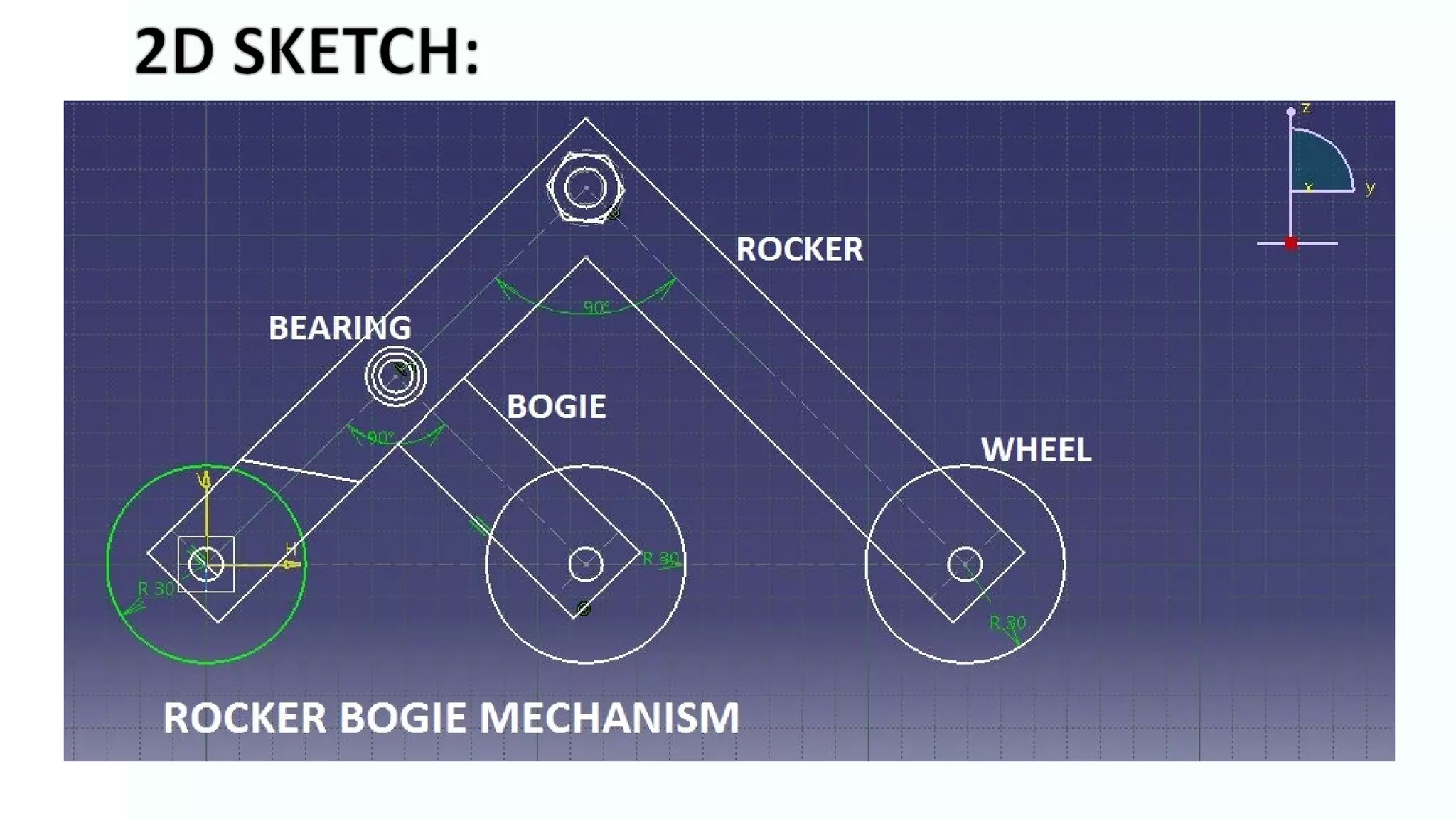
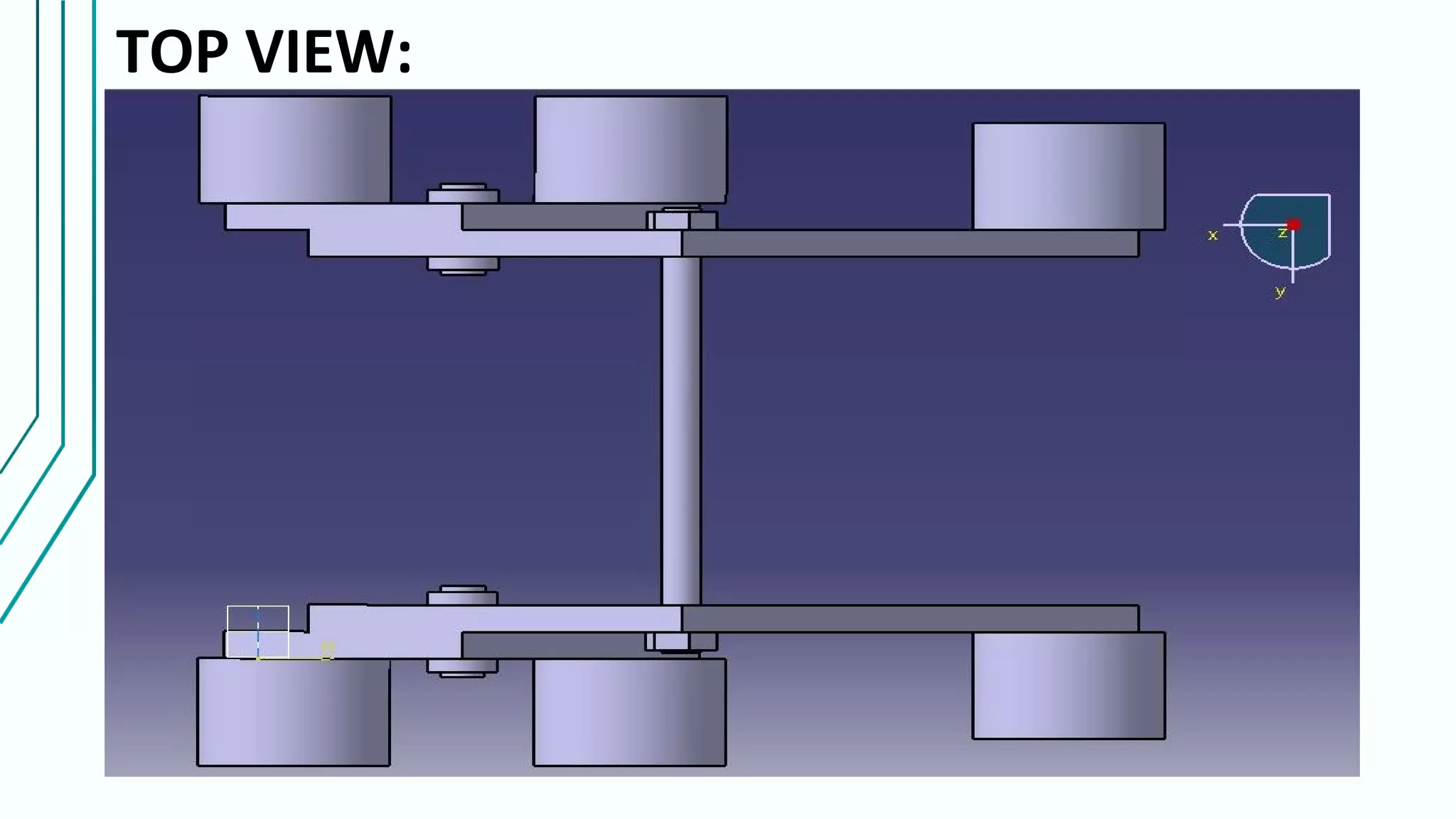
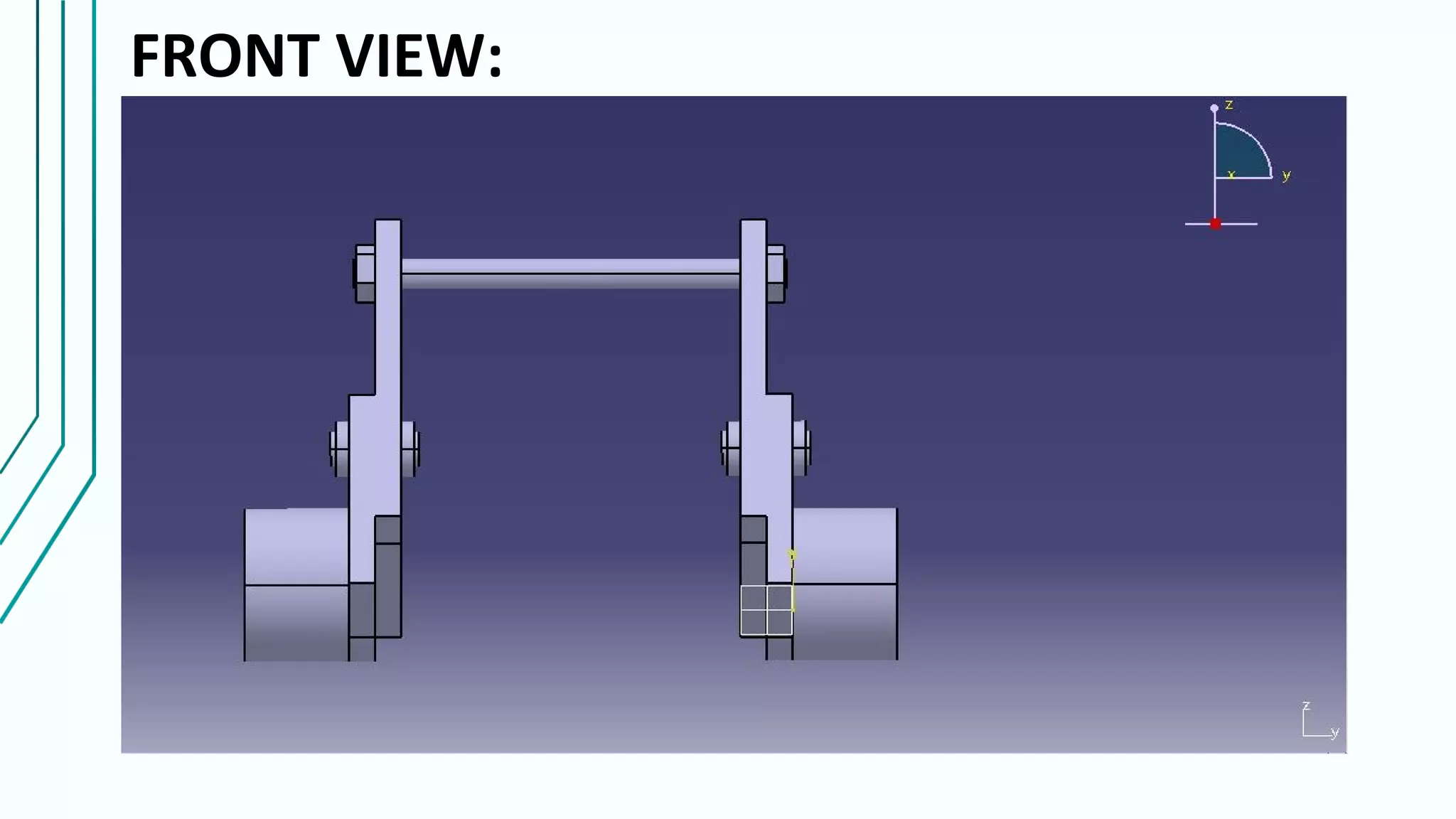
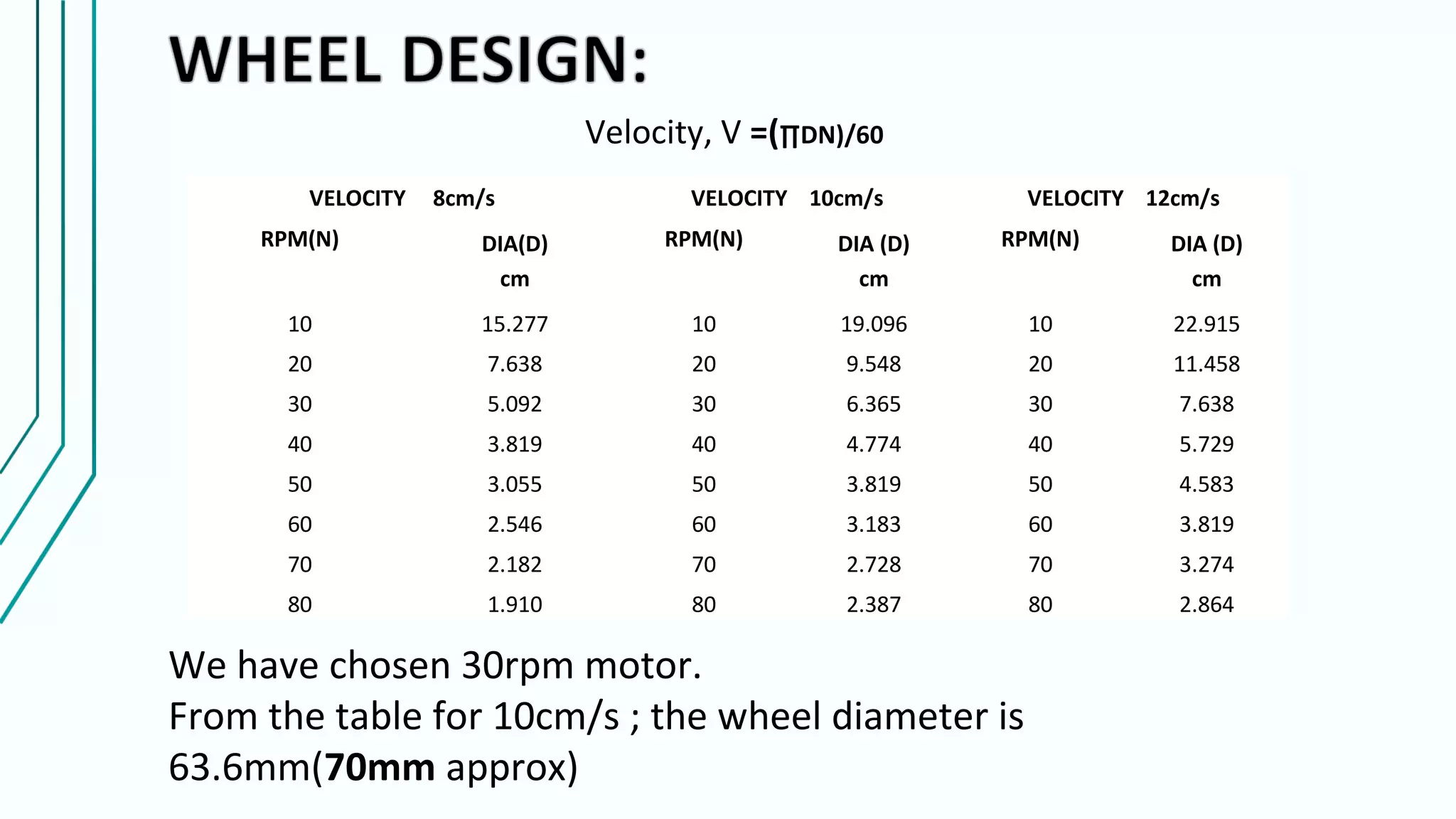
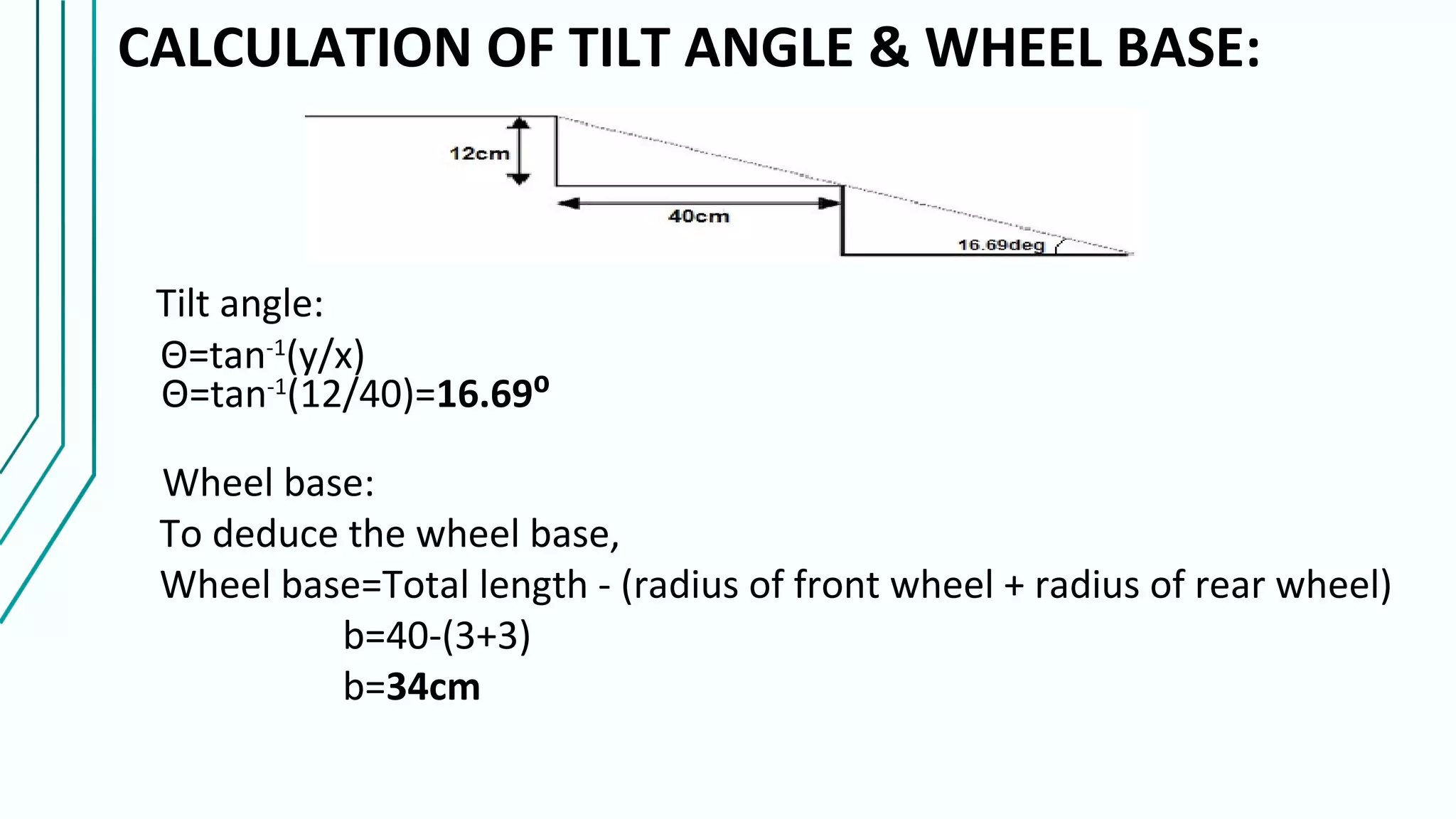
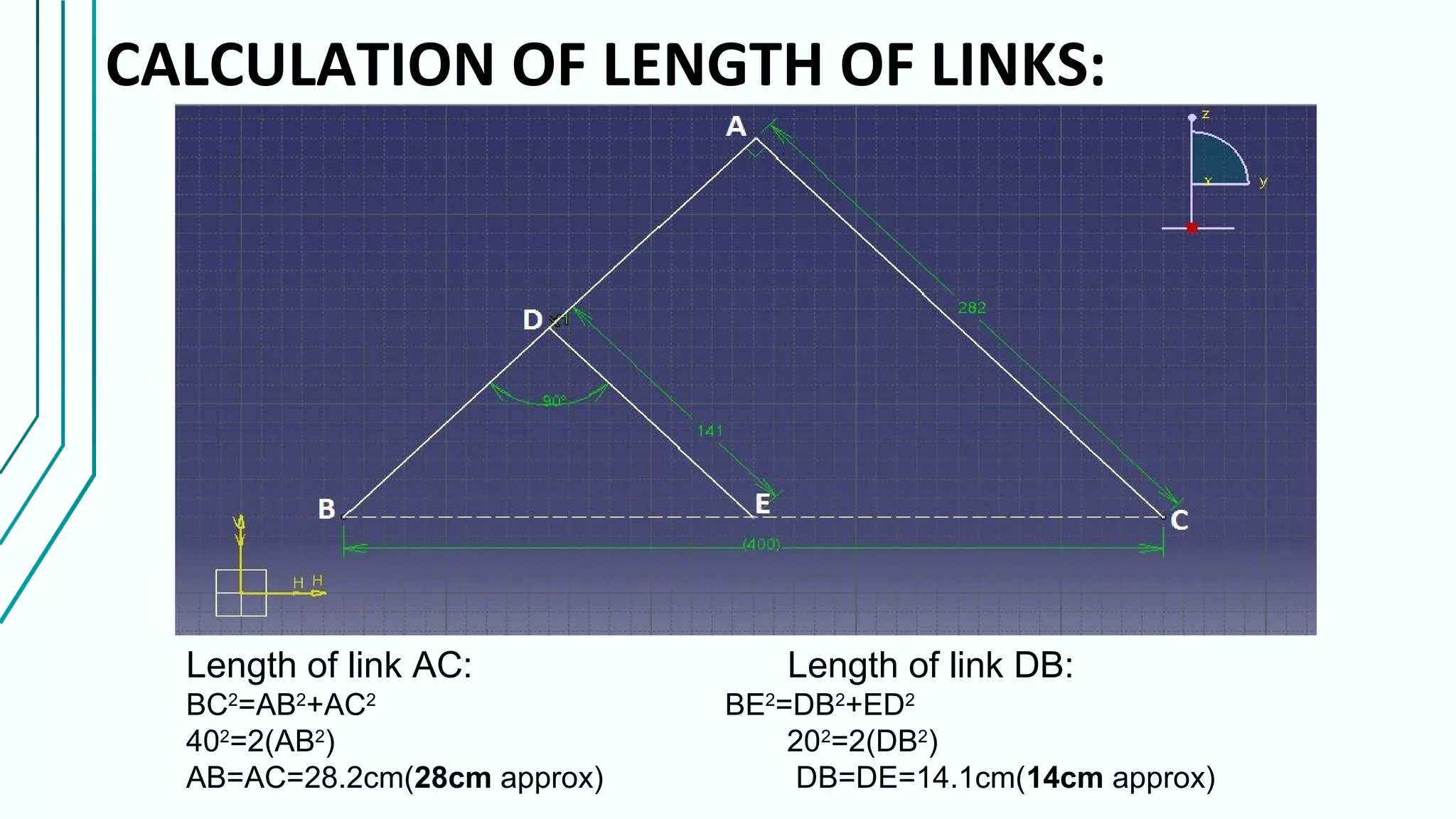
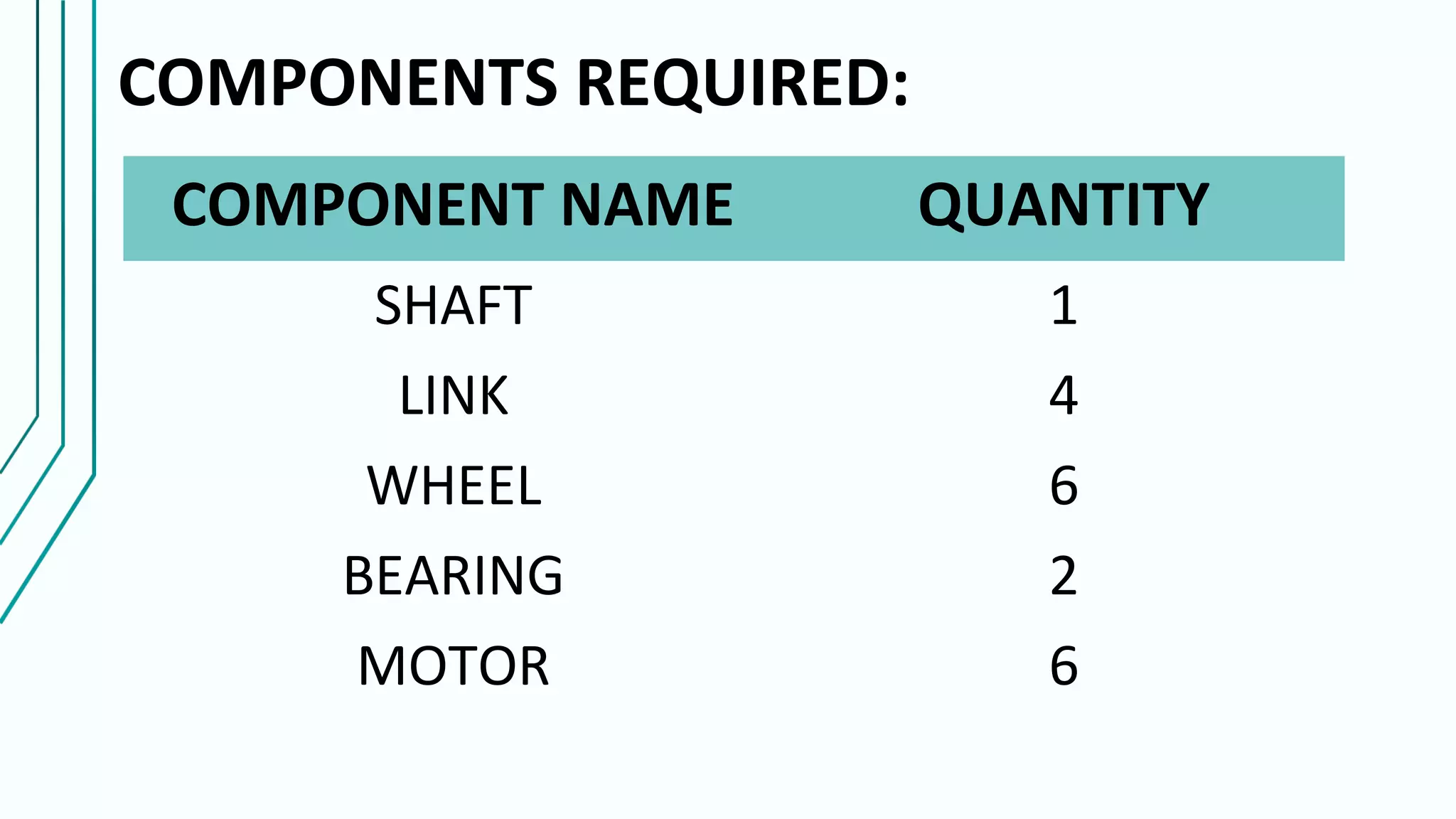
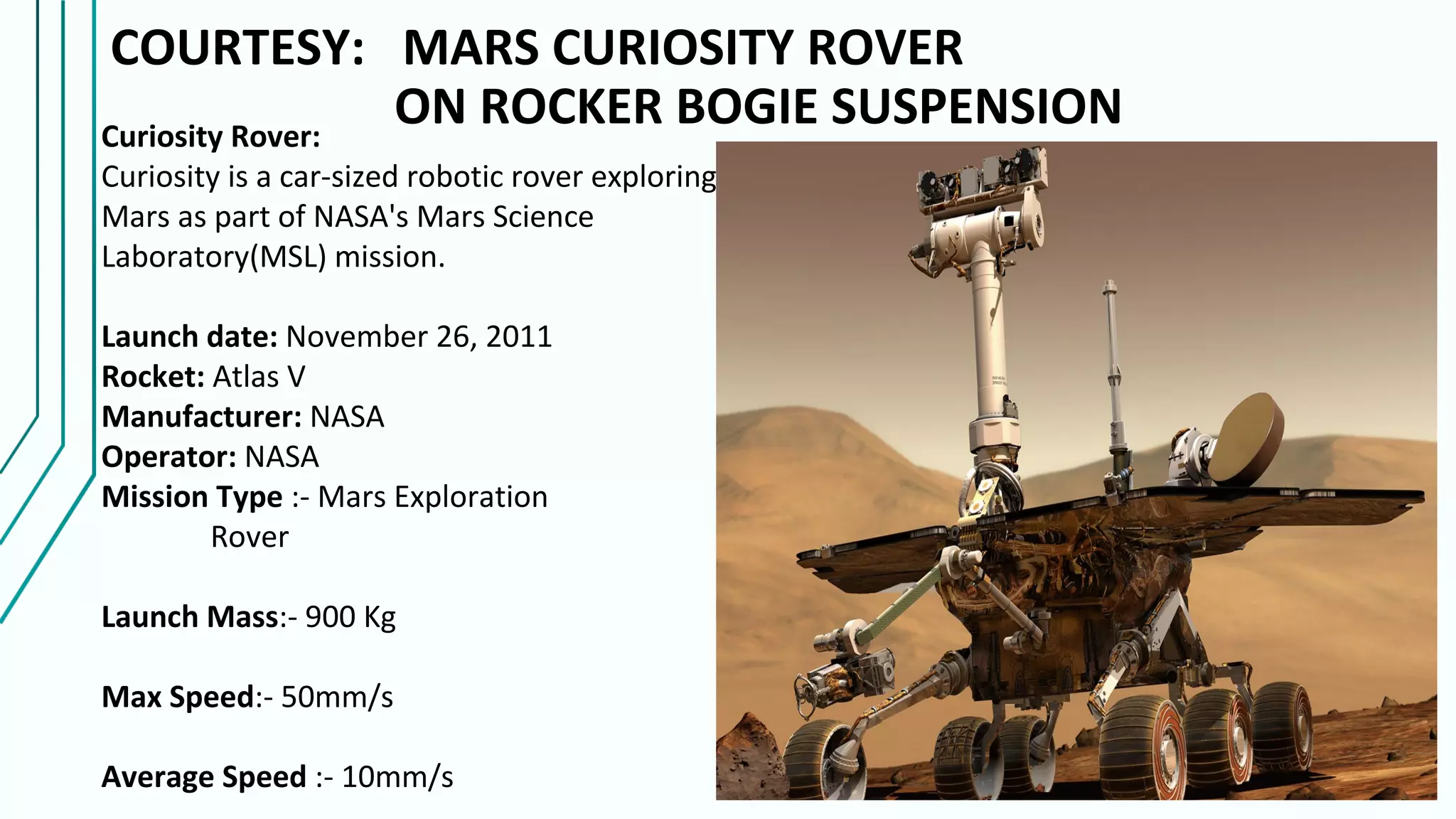
This document describes the design and fabrication of a rocker bogie mechanism. The rocker bogie system is a suspension used on Mars rovers to allow independent wheel movement over obstacles. The design includes two rocker arms that allow the left and right wheels to climb obstacles individually. Calculations are shown for tilt angle, wheel base, link lengths, and motor specifications. Components include shafts, links, wheels, bearings, and motors. The advantages of the rocker bogie system include its ability to climb obstacles twice the wheel diameter and distribute load evenly across independently moving wheels.