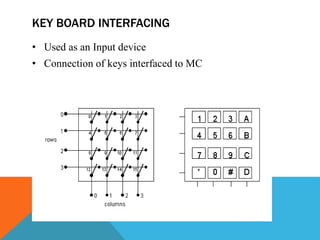
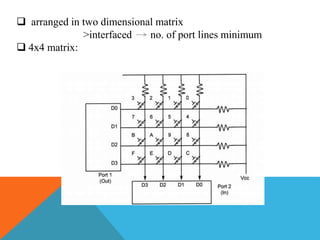
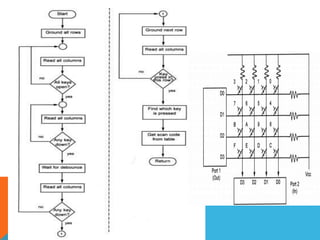
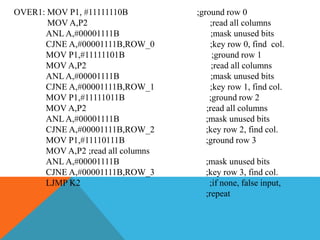
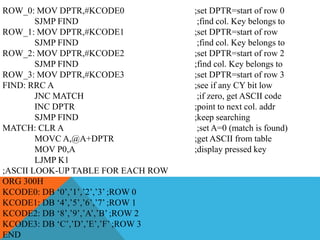
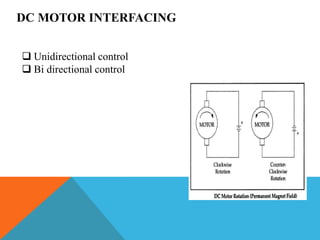
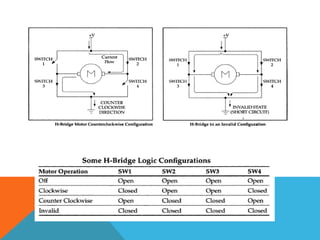
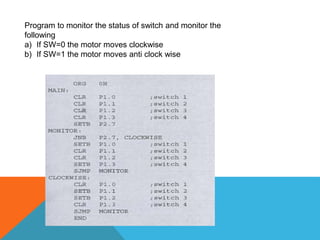
The document discusses interfacing a keyboard and DC motor to an 8051 microcontroller. It describes using a keyboard scanning technique to identify pressed keys using a row and column arrangement. It also discusses issues with keyboard interfacing like debouncing and multiple key presses. The document provides code to interface a 4x4 keyboard and read the pressed key. It also discusses using a DC motor interface for unidirectional and bidirectional control based on the status of a switch.