Download as PDF, PPTX




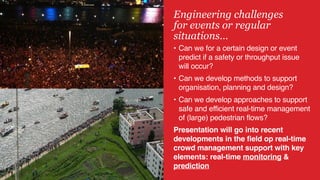
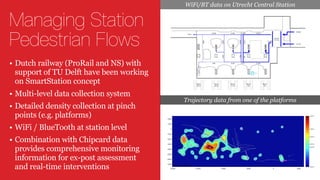



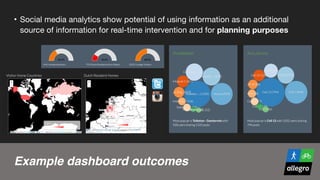
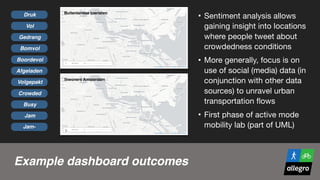





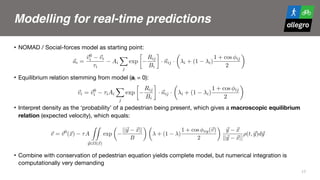
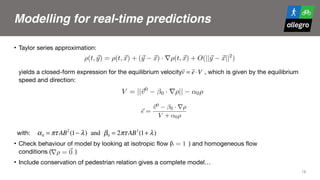
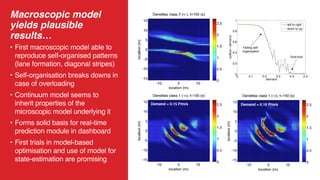





The document discusses the breakdown of efficient self-organization in pedestrian flows when density exceeds critical levels, leading to decreased flow performance and necessitating effective crowd management strategies. It highlights recent developments in real-time crowd management systems, including data collection at transportation hubs and event scenarios, as well as models for predicting pedestrian behavior and flow dynamics. The work explores integration of social media data with traditional monitoring for enhanced situational awareness and planning.