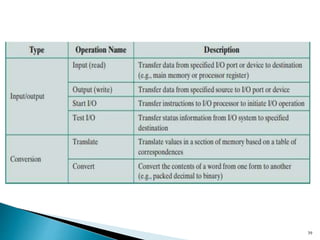
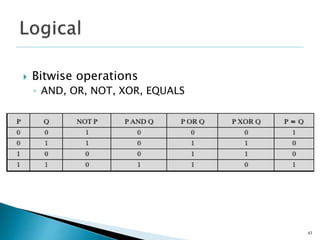
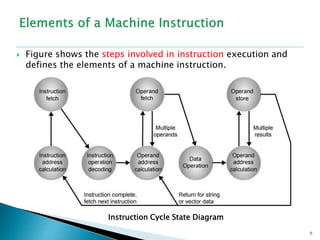
The document discusses machine instruction characteristics and instruction sets. It begins by describing the typical elements of a machine instruction, which include an operation code, source operand reference(s), result operand reference, and next instruction reference. It then discusses the types of locations that can hold operands, including memory, registers, immediate values, and I/O devices. The document provides examples of instructions with different numbers of addresses (zero, one, two, and three addresses) and how programs can be written using each type. Overall, the document provides an overview of the essential components of machine instructions and instruction sets.
![18
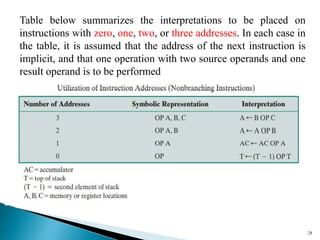
In most architectures, many instructions have one, two, or three
operand addresses, with the address of the next instruction being
implicit (obtained from the program counter).
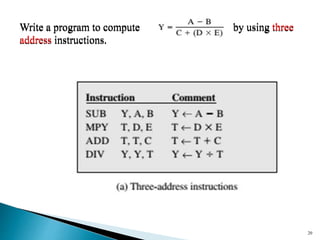
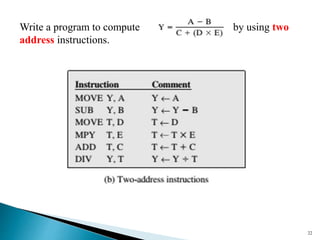
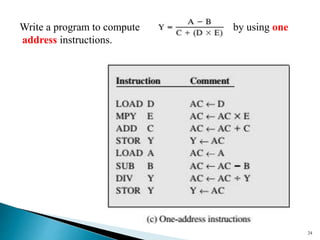
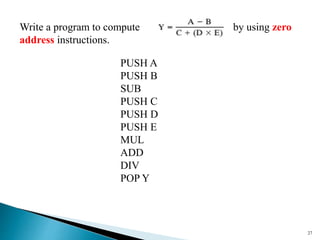
Compare typical one-, two-, and three- address instructions that
could be used to compute
Y = (A - B)/[C + (D * E)].
For example, the load and store multiple instructions of the ARM
architecture, designate up to 17 register operands in a single
instruction](https://image.slidesharecdn.com/itec582-chapter12-230404011524-3b6a94a0/85/ITEC582-Chapter-12-pptx-18-320.jpg)