Download to read offline















![• RA spectrum is presented with [range, angle] representations in polar coordinates.
• To increase the readability, RA data can also be transformed into top-view coordinates.
Polar to Cartesian
20
© 2024 University of Ottawa / Sensor Cortek inc
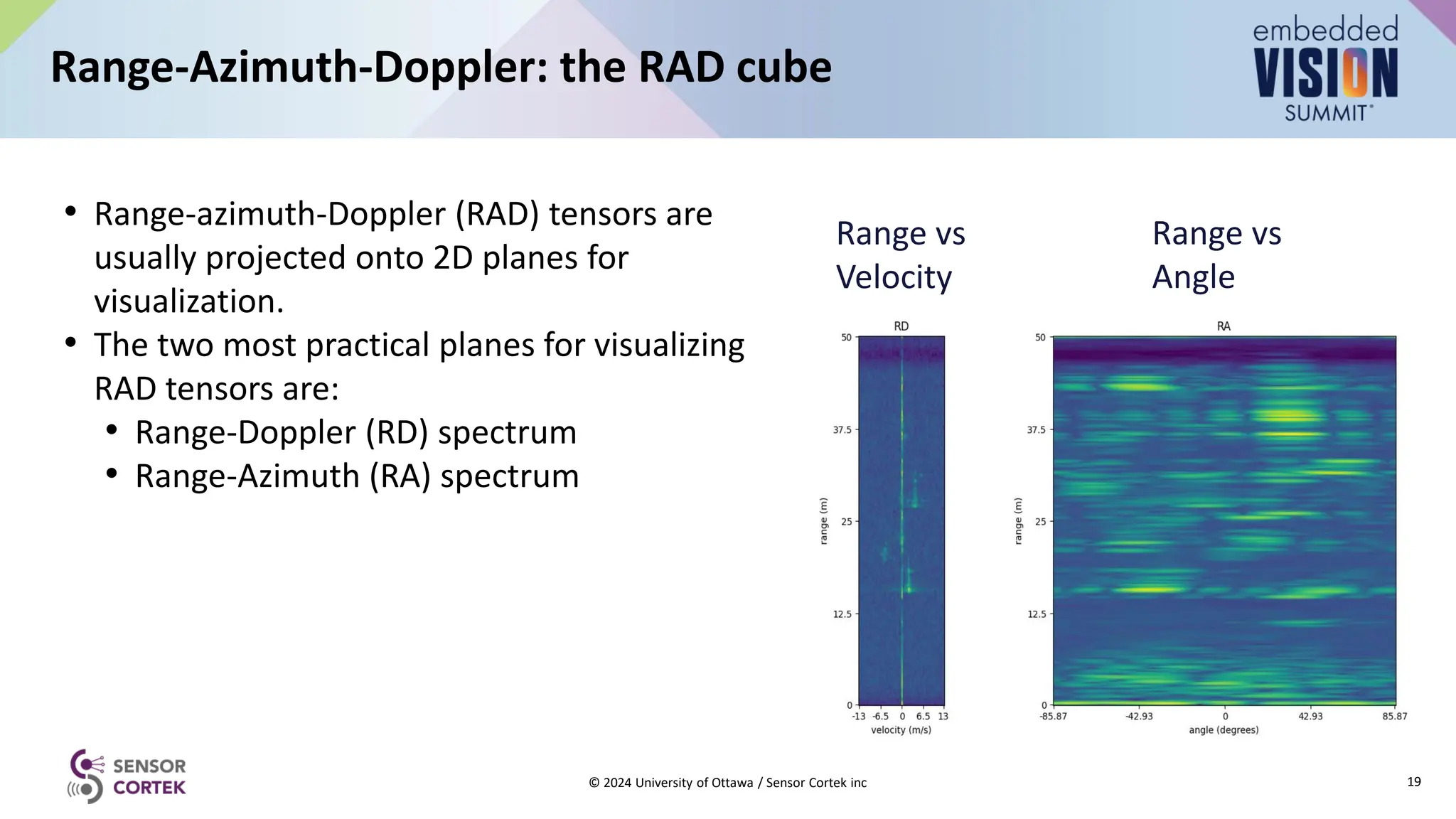
Range vs
Angle
Cartesian coordinates [X,Z]](https://image.slidesharecdn.com/fr09laganisresensorcortek2024-241018121615-f7bf438d/75/Introduction-to-Modern-Radar-for-Machine-Perception-a-Presentation-from-Sensor-Cortek-20-2048.jpg)



The document provides an introduction to modern radar technology, focusing on its principles, historical development, and various applications in fields like automotive safety and object detection. It covers technical aspects such as frequency modulation, FMCW radar techniques, and signal processing methods used to extract range, velocity, and direction from radar data. The pros and cons of radar systems are discussed, highlighting their reliability and effectiveness in adverse weather conditions alongside the challenges faced in signal interpretation.