The document outlines interrupts as signals that disrupt the normal flow of control in programs, categorized into hardware and software types. It describes how to handle interrupts, emphasizing the role of interrupt service routines (ISRs) and the importance of context switching during interrupt processing. Various prioritizations and types of interrupt handlers are explained, including first-level and second-level handlers, along with the concept of interrupt latency.
This section introduces interrupts, defining them as events that disrupt the normal execution of programs, and an overview of their sources, such as hardware and software.
The focus here is on the two main types of interrupts: hardware and software interrupts, outlining their distinctions and roles in a programming context.
Detailing software interrupts, including their categories and specific examples in the 8085 microprocessor, with vector address calculation and examples.
Examines hardware interrupts, distinguishing between maskable and non-maskable types, and provides a categorized list of interrupts specific to the 8085 microprocessor.
Describes the interrupt handling process, including context switching, ISR features, types of interrupt handlers, and the concept of interrupt latency.
What are interrupts?
Acondition or event that interrupts the
normal flow of control in a program.
Basically interrupt is a signal
* signal means signal can be generated from particular
hardware or signal can be generate particular program
execuation.
4.
Continue……….
an event externalto the currently executing
process that causes a change in the normal flow
of instruction execution; usually generated by
hardware devices external to the CPU
5.
Interrupt source
Hardware interruptsoccur due to a change
in state of some hardware
Software interrupts are triggered by the
execution of a machine instruction
SOFTWARE INTERRUPT
A softwareinterrupts is a particular
instructions that can be inserted into the
desired location in the rpogram.
8.
SOFTWARE INTERRUPT
Software Interrupts:Software interrupt can also divided in to two
categories. They are
Normal Interrupts: the interrupts which are caused by the
software instructions are called software instructions.
Exception: unplanned interrupts while executing a program is
called Exception. For example: while executing a program if we
got a value which should be divided by zero is called a exception.
9.
There are eightSoftware interrupts in
8085 Microprocessor:
RST0
RST1
RST2
RST3
RST4
RST5
RST6
RST7
10.
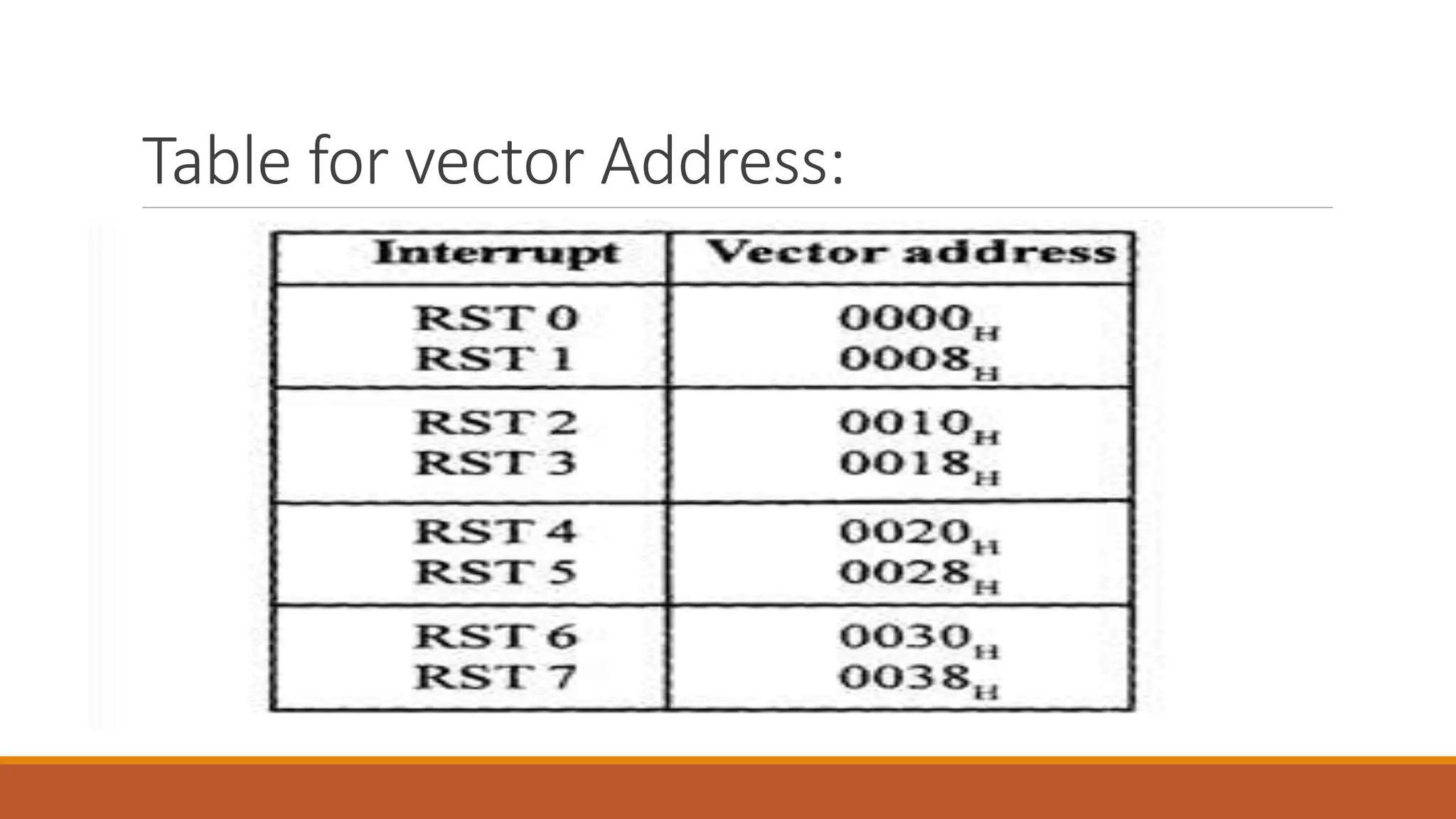
Calculation for vectorAddress:
We can calculate the vector address of these interrupts using the formula given
below:
Vector Address = Interrupt Number * 8
So we can find simply vector address. For Example:
RST2: vector address=2*8 = 16
RST1: vector address=1*8 = 08
RST3: vector address=3*8 = 24
Hardware interrupt
Interrupt isa signal to the processer generated by the
hardware indicated an immedate attention needed by an
event
13.
Categories:
Maskable Interrupt: Thehardware interrupts which can be
delayed when a much highest priority interrupt has
occurred to the processor.
Non Maskable Interrupt: The hardware which cannot be
delayed and should process by the processor immediately.
14.
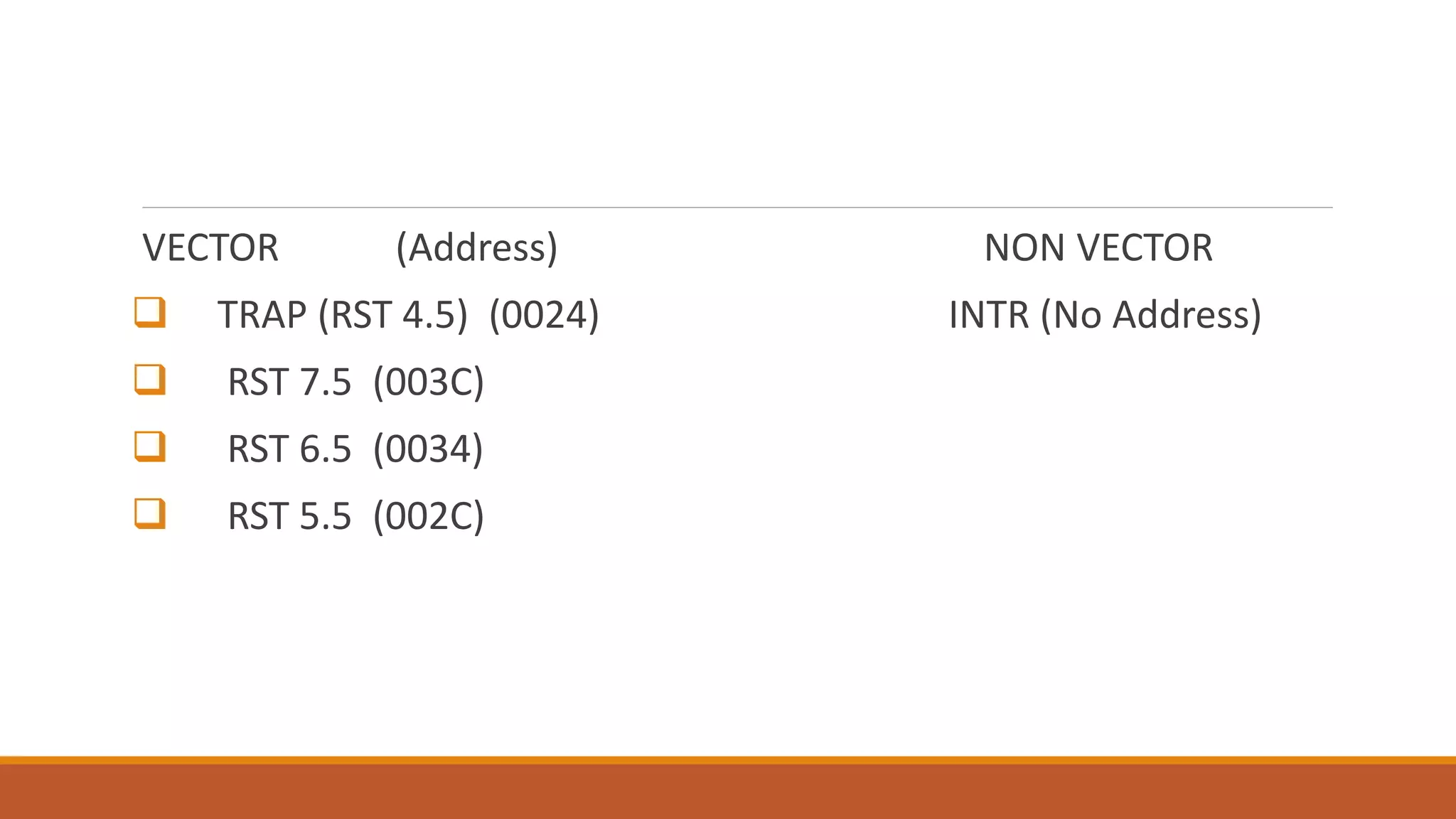
In 8085 wehave 5 interrupt
NAME Priority
1. Trap (RST 4.5) highest
2. RST 7.5 higher
3. RST 6.5 medium
4. RST 5.5 least
5. INTR least
Interrupt Handling:
We knowthat instruction cycle consists of fetch, decode,
execute and read/write functions. After every instruction
cycle the processor will check for interrupts to be processed
if there is no interrupt is present in the system it will go for
the next instruction cycle which is given by the instruction
register.
19.
Continue…….
If there isan interrupt present then it will trigger the interrupt
handler, the handler will stop the present instruction which is
processing and save its configuration in a register and load the
program counter of the interrupt from a location which is given by
the interrupt vector table. After processing the interrupt by the
processor interrupt handler will load the instruction and its
configuration from the saved register, process will start its processing
where it’s left. This saving the old instruction processing
configuration and loading the new interrupt configuration is also
called as context switching.
20.
Continue……
The interrupt handleris also called as Interrupt
service routine (ISR). There are different types of
interrupt handler which will handle different
interrupts. For example for the clock in a system will
have its interrupt handler, keyboard it will have its
interrupt handler for every device it will have its
interrupt handler.
21.
The main featuresof the ISR are:
Interrupts can occur at any time they are
asynchronous. ISR’s can call for asynchronous
interrupts.
Interrupt service mechanism can call the ISR’s from
multiple sources.
ISR’s can handle both maskable and non maskable
interrupts. An instruction in a program can disable or
enable an interrupt handler call.
22.
Continue …
ISR onbeginning of execution it will disable other devices
interrupt services. After completion of the ISR execution it
will re initialize the interrupt services.
The nested interrupts are allowed in ISR for diversion to
other ISR.
23.
Type of InterruptHandlers:
First Level Interrupt Handler (FLIH) is hard interrupt
handler or fast interrupt handler. These interrupt handlers
have more jitter while process execution and they are
mainly maskable interrupts
Second Level Interrupt Handler (SLIH) is soft interrupt
handler and slow interrupt handler. These interrupt
handlers are having less jitter.
24.
Interrupt Latency:
When aninterrupt occur, the service of the
interrupt by executing the ISR may not start
immediately by context switching. The time interval
between the occurrence of interrupt and start of
execution of the ISR is called interrupt latency.
























































![[DSC Europe 25] Dragana Ilic - AI for Big Data in Astronomy.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/8palya86qaatvjhva1ms-2-dragana-ilic-ai-ilic-251208151906-652b819c-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DSC Europe 25] Petar Zivanov - AI meets documents From chatbots to AI-powere...](https://cdn.slidesharecdn.com/ss_thumbnails/xer2bb6nrdc8pdpev0pc-8-251204082258-7c2fa4a1-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DSC Europe 25] Boris Perkovic - Lost in performance.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/uq5hrp7vsuahqkxzifux-1-251204082258-fd2ee09d-thumbnail.jpg?width=640&height=640&fit=bounds)




![[DSC Europe 25] Nikola Rajovic - Hardware Technologies Under the Hood: RISC-V...](https://cdn.slidesharecdn.com/ss_thumbnails/o2gptrmtoyqndgoshwgq-dsc2025-tenstorrent-rajovic-251205090438-814685f5-thumbnail.jpg?width=640&height=640&fit=bounds)