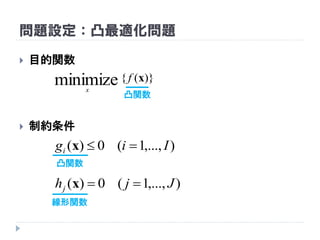
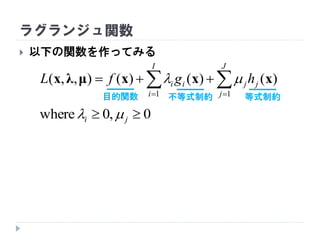
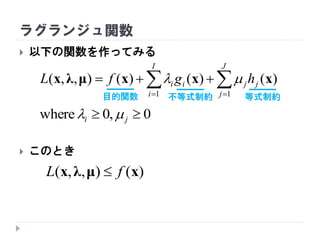
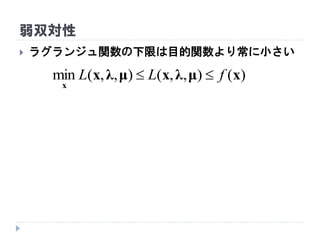
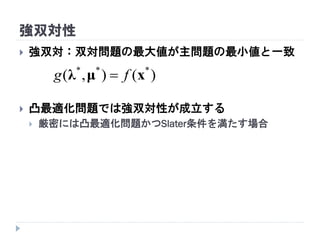
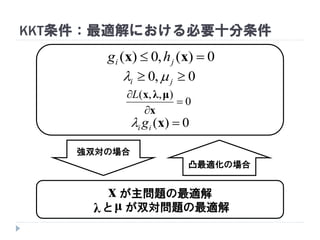
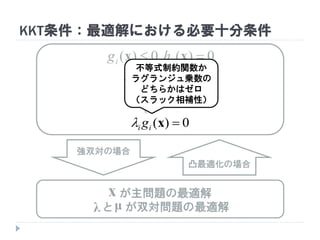
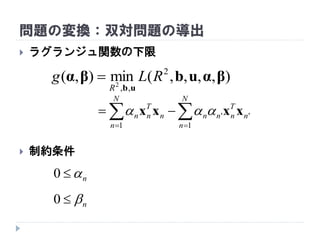
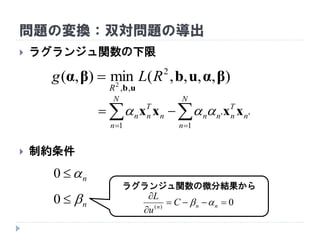
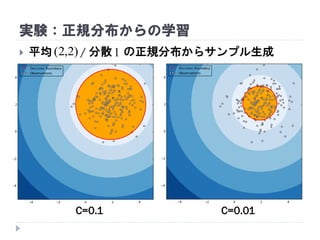
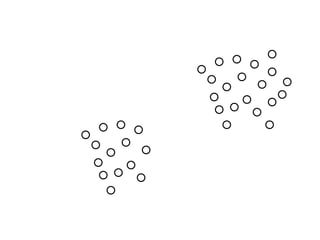
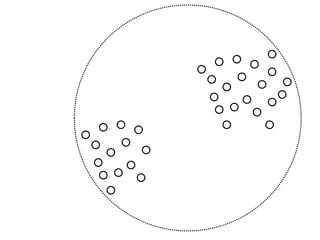
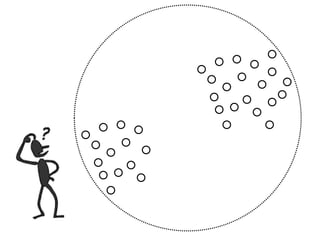
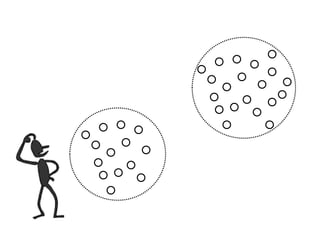
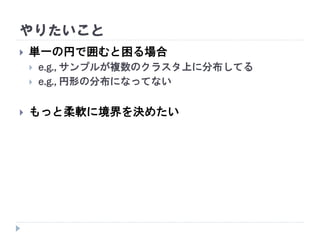
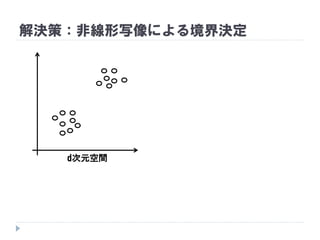
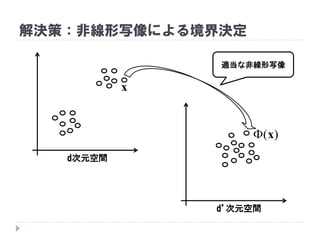
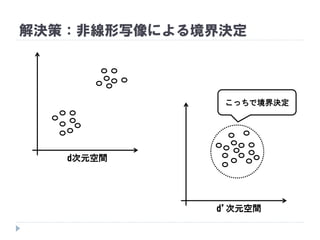
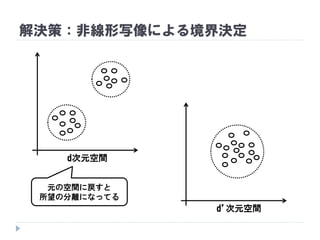
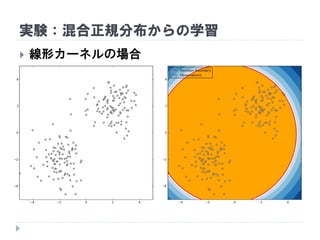
カーネルトリック
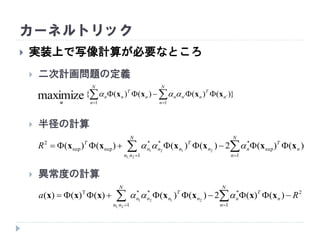
実装上で写像計算が必要なところ
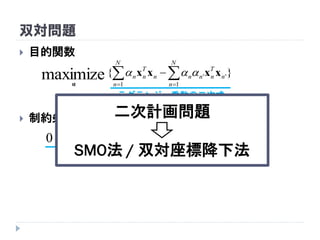
二次計画問題の定義
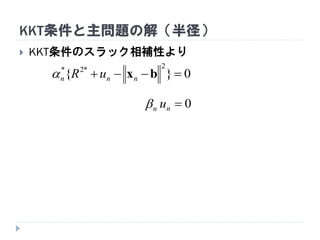
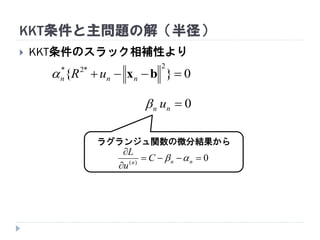
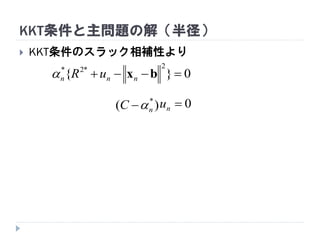
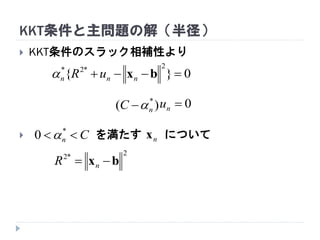
半径の計算
異常度の計算
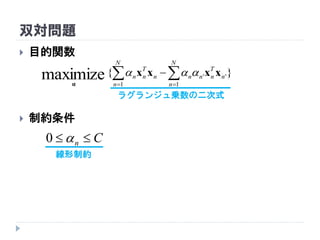
})()()()({
1
''
1
maximize
N
n
n
T
nnn
N
n
n
T
nn xxxx
α
N
nn
N
n
n
T
nn
T
nnn
T
R
1 1
sup
***
supsup
2
2,1
2121
)()(2)()()()( xxxxxx
N
nn
N
n
n
T
nn
T
nnn Ra
1
2
1
***T
2,1
2121
)()(2)()()()()( xxxxxxx
60.
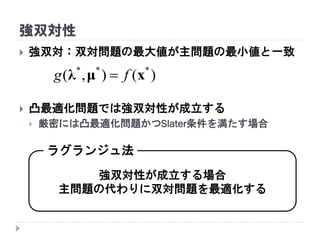
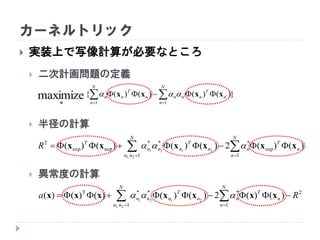
カーネルトリック
実装上で写像計算が必要なところ
二次計画問題の定義
半径の計算
異常度の計算
})()()()({
1
''
1
maximize
N
n
n
T
nnn
N
n
n
T
nn xxxx
α
N
nn
N
n
n
T
nn
T
nnn
T
R
1 1
sup
***
supsup
2
2,1
2121
)()(2)()()()( xxxxxx
N
nn
N
n
n
T
nn
T
nnn Ra
1
2
1
***T
2,1
2121
)()(2)()()()()( xxxxxxx










![SSII2021 [TS2] 深層強化学習 〜 強化学習の基礎から応用まで 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ts2-01-210607042910-thumbnail.jpg?width=640&height=640&fit=bounds)






![[DL輪読会]Wasserstein GAN/Towards Principled Methods for Training Generative Adv...](https://cdn.slidesharecdn.com/ss_thumbnails/wgan-1-170224021826-thumbnail.jpg?width=640&height=640&fit=bounds)





















































