Downloaded 12 times



![3.3 AUTO CORRELATION FUNCTION:
Q(x, y) = |
∑ Ix(x, y)2
w ∑ Ix(x, y).Iy(x, y)W
∑ Ix(x, y).I Y(x, y)W ∑ Iy(x, y)2
w
| = |
A B
B C
| (3.6)
W = Window function (3 x 3)
I𝑥 = Pixel Row
I𝑦 = Pixel Column
(𝑥, 𝑦) = pixel of the given window
c(x, y, Δx, Δy) = [Δx, Δy] Q(x, y) |
Δx
Δy
| (3.7)
(𝛥𝑥, 𝛥𝑦) = sifted (neighbourhood) pixel of (𝑥, 𝑦)
3.4 HARRIES OPERATOR:
ƛ1 ƛ2 = det Q(x, y) = AC − B2
; ƛ1+ƛ2 = trace Q(x, y) = (A + C) ;
H = ƛ1 ƛ2 – 0.04(ƛ1+ƛ2)2
(3.8)
det = matrix determinant
trace = sum of diagonal element
ƛ1 = curvature (intensity value) in X direction
ƛ2 = curvature (intensity value) in Y direction](https://image.slidesharecdn.com/harriescornerdetectorderivedbylocalautocorrelationfunction-160129042913/85/Harries-corner-detector-derived-by-local-autocorrelation-function-survey-4-320.jpg)

![RESULT AND DISCUSSION
For a human, it is easier to identify a “corner”, but a mathematical detection is
required in case of algorithms. Chris Harris and Mike Stephens in 1988 improved upon
Moravec's corner detector by taking into account the differential of the corner score
with respect to direction directly instead of using shifted patches. Moravec only
considered shifts in discrete 45 degree angles whereas Harris considered all directions.
Harris detector has proved to be more accurate in distinguishing between edges
and corners. In this a circular Gaussian window is used to reduce noise and local
autocorrelation function is used for find out the correlation between the original position
and sifted position. Harris equation provides the both Eigen values of x and y direction,
when the both Eigen values are larger that’s become corner or interest points, when only
any one of Eigen values of x and y direction are larger that’s become edges, and both
Eigen values are become low, that’s become flat region. Here by the feature has been
extracted with respect to intensity pattern
In this section we are computing some test images and medical images as a X
direction [A(x,y)], Y direction [C(x,y)], Diagonal direction [B(x,y)] and also corner
detected images with their corresponding input image [I(x,y)] are shown in the
figure:3.4.](https://image.slidesharecdn.com/harriescornerdetectorderivedbylocalautocorrelationfunction-160129042913/85/Harries-corner-detector-derived-by-local-autocorrelation-function-survey-6-320.jpg)
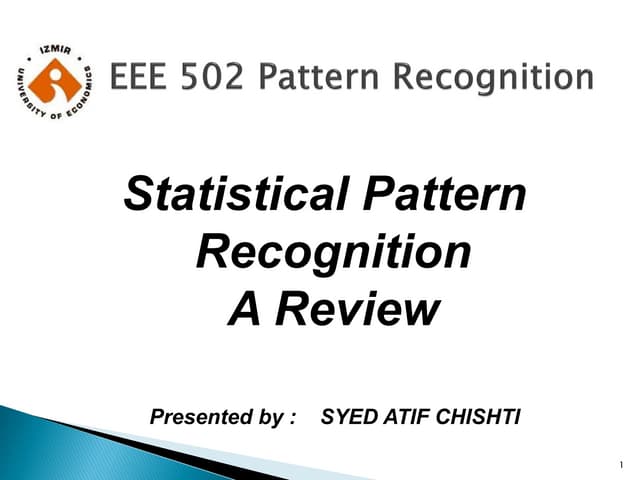
![4.1 OUTPUT
4.1.1 Test Image.1
Input image [I(x,y)] X direction [A(x,y)]
Figure: 4.1.1a Figure: 4.1.1b
Y direction [C(x,y)] Diagonal direction [B(x,y)]
Figure: 4.1.1c Figure: 4.1.1d
Corner detected image
Figure: 4.1.1e
Image Details: 538 X 615 X 3 No. Of Interest Points: 69](https://image.slidesharecdn.com/harriescornerdetectorderivedbylocalautocorrelationfunction-160129042913/85/Harries-corner-detector-derived-by-local-autocorrelation-function-survey-7-320.jpg)
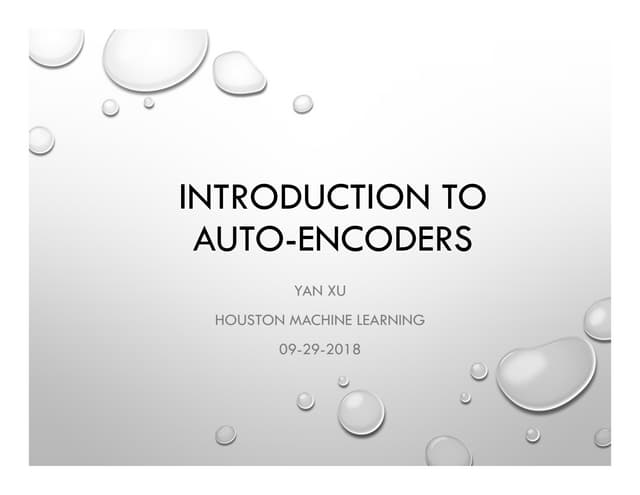
![4.1.2 Test Image.2
Input image [I(x,y)] X direction [A(x,y)]
Figure: 4.1.2a Figure: 4.1.2b
Y direction [C(x,y)] Diagonal direction [B(x,y)]
Figure: 4.1.2c Figure: 4.1.2d
Corner detected image
Figure: 4.1.2e
Image Details: 768 X 1024 X 3 No. Of Interest Points: 16](https://image.slidesharecdn.com/harriescornerdetectorderivedbylocalautocorrelationfunction-160129042913/85/Harries-corner-detector-derived-by-local-autocorrelation-function-survey-8-320.jpg)
![4.1.3 Retinal Image
Input image [I(x,y)] X direction [A(x,y)]
Figure: 4.1.3a Figure: 4.1.3b
Y direction [C(x,y)] Diagonal direction [B(x,y)]
Figure: 4.1.3c Figure: 4.1.3d
Corner detected image
Figure: 4.1.3e
Image Details: 471 X 689 X 3 No. Of Interest Points: 75](https://image.slidesharecdn.com/harriescornerdetectorderivedbylocalautocorrelationfunction-160129042913/85/Harries-corner-detector-derived-by-local-autocorrelation-function-survey-9-320.jpg)
![4.1.4 Cervical Spine Image
Input image [I(x,y)] X direction [A(x,y)]
Figure: 4.1.4a Figure: 4.1.4b
Y direction [C(x,y)] Diagonal direction [B(x,y)]
Figure: 4.1.4c Figure: 4.1.4d
Corner detected image
Figure: 4.1.4e
Image Details: 445 X 276 X 3 No. Of Interest Points: 64](https://image.slidesharecdn.com/harriescornerdetectorderivedbylocalautocorrelationfunction-160129042913/85/Harries-corner-detector-derived-by-local-autocorrelation-function-survey-10-320.jpg)
![4.1.5 Skull Image
Input image [I(x,y)] X direction [A(x,y)]
Figure: 4.1.5a Figure: 4.1.5b
Y direction [C(x,y)] Diagonal direction [B(x,y)]
Figure: 4.1.5c Figure: 4.1.5d
Corner detected image
Figure: 4.1.5e
Image details: 556 X 541 X 3 No. of Interest points: 66](https://image.slidesharecdn.com/harriescornerdetectorderivedbylocalautocorrelationfunction-160129042913/85/Harries-corner-detector-derived-by-local-autocorrelation-function-survey-11-320.jpg)


The document describes the Harris corner detector, which is used to detect interest points or corners in digital images. It works by calculating the autocorrelation matrix of an image window to determine if the window contains a corner. The autocorrelation matrix captures the gradient of the image in both the x and y directions. Corners are identified as points where both eigenvalues of the autocorrelation matrix are large, indicating a high variation in gradient in both directions. The Harris corner detector was an improvement over previous corner detectors as it considers gradient variations in all directions within a window. Examples show the Harris detector being applied to medical images to extract interest points for image registration.