Downloaded 29 times


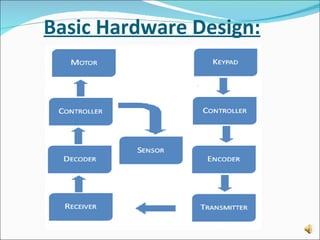
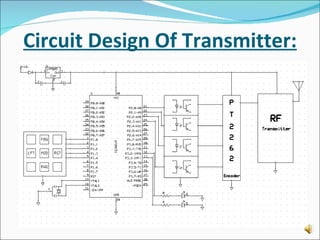



This document describes a project to create an autonomous and remote-controlled vehicle using ultrasonic sensors. The vehicle has two modes - a remote control mode where it can be operated remotely, and an autonomous mode where it avoids obstacles using sensor feedback. The project aims to design the hardware and software needed for motor control, signal transmission and obstacle detection. Ultrasonic sensors and an LM567 integrated circuit are used for detection due to their low cost and reliability.




























































![PPT On IOT BasedAutomatic Bumper [Autosaved].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/pptoniotbasedautomaticbumperautosaved-240315163352-7fb59c2d-thumbnail.jpg?width=640&height=640&fit=bounds)

























