Download to read offline


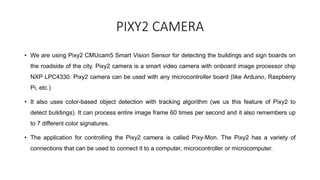

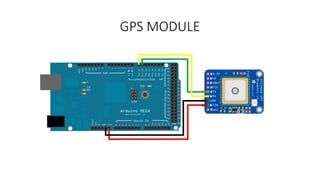


This document proposes an autonomous electric vehicle that can detect roadside buildings to navigate to its destination. It uses sensors like infrared sensors, an ultrasonic sensor, and the Pixy2 camera to detect objects while an Arduino board controls the vehicle's motion. The vehicle is intended to help reduce accidents by removing human error in driving and could potentially be used to deliver products.

![Smart accident detector and intimator [autosaved]](https://cdn.slidesharecdn.com/ss_thumbnails/smartaccidentdetectorandintimatorautosaved-180331150920-thumbnail.jpg?width=640&height=640&fit=bounds)






















































![PERI-PROSTHETIC FRACTURE NAIL-PLATE CONSTRUCT [NPC].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/drarunkumardrmohamedashrafperiprostheticfrasturenail-plateconstructnpc-260209164459-7e9d15a1-thumbnail.jpg?width=640&height=640&fit=bounds)


