
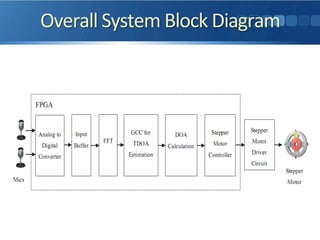














This document presents a final year project on FPGA-based acoustic source localization aimed at determining the position of sound sources using field measurements. It discusses the integration of this technology with video cameras for applications like security surveillance and interactive robotics. The project highlights challenges such as background noise interference and the need for multiple microphones for accurate localization.