











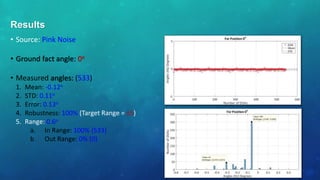
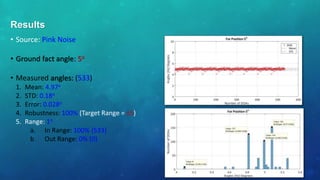
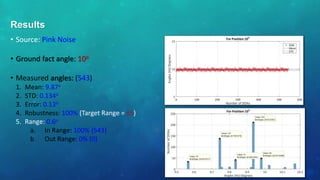
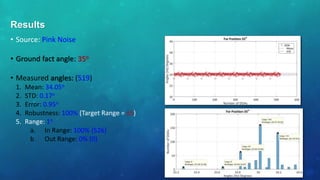
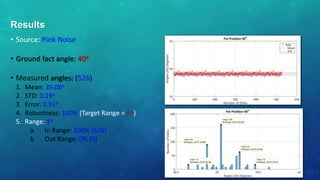
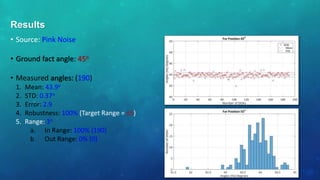
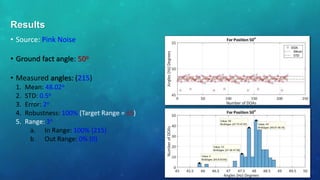
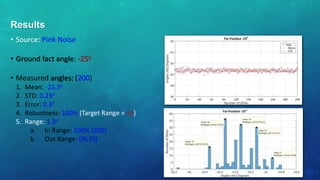
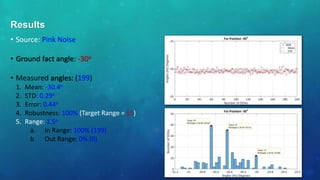
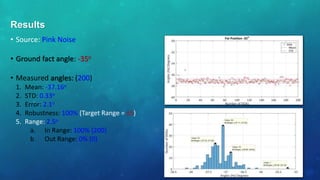
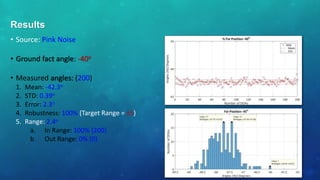
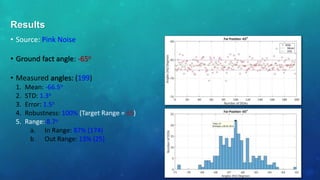
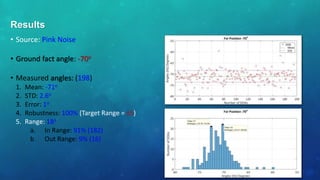
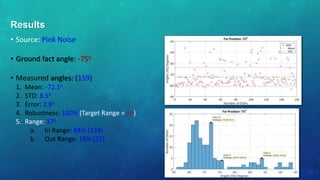
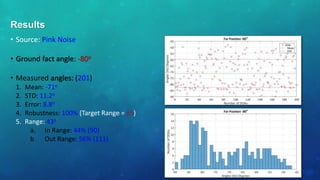



The document outlines a detailed procedure for measuring and analyzing localization performance using a Kinect microphone array. It covers data acquisition methods, array performance analysis, and experimental evaluations with various sound sources, focusing on accuracy and robustness of localization. Various statistical metrics are used to quantify performance based on ground truth angles and the results demonstrate high accuracy across different angles.







































![[Deck] What's New in Spark-Iceberg Integration via DSV2.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/deckwhatsnewinspark-icebergintegrationviadsv2-260210005337-25955b12-thumbnail.jpg?width=640&height=640&fit=bounds)




