Downloaded 37 times
![Continuity Equation for one dimensional flow
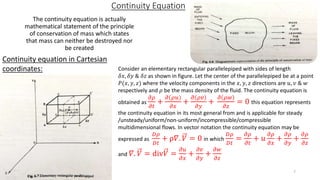
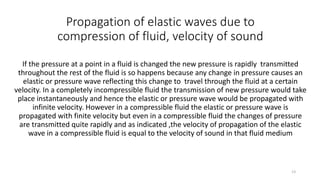
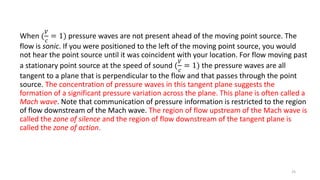
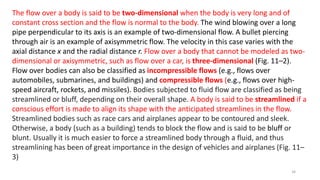
Consider a tube shaped elementary parallelepiped along a
stream-tube of length 𝛿𝑠 as shown in figure. Since the flow
through a stream-tube is always along the tangential direction
there is no component of velocity in the normal direction. If at
the central section of the elementary stream-tube ,𝐴 is the
cross sectional area, 𝑉 is the mean velocity of flow, 𝜌 is the
mass density of the fluid then the mass of fluid passing this
section per unit time is equal to 𝜌𝐴𝑉
The mass of fluid entering the tube per unit time at section
𝑁𝑀 = [𝜌𝐴𝑉 −
𝜕
𝜕𝑠
(𝜌𝐴𝑉)
𝛿𝑠
2
]
Similarly the mass of fluid leaving the tube per unit
time at section 𝑁′ 𝑀′ = [𝜌𝐴𝑉 +
𝜕
𝜕𝑠
(𝜌𝐴𝑉)
𝛿𝑠
2
]
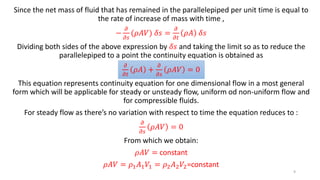
Therefore the net mass of fluid that has remained
per unit time= −
𝜕
𝜕𝑠
(𝜌𝐴𝑉) 𝛿𝑠 The mass of fluid in
the tube = 𝜌𝐴 𝛿𝑠 and its rate of increase with time
=
𝜕
𝜕𝑡
𝜌𝐴 𝛿𝑠 =
𝜕
𝜕𝑡
𝜌𝐴 𝛿𝑠 8](https://image.slidesharecdn.com/fluidmechanics-170404114603/85/Fluid-mechanics-8-320.jpg)
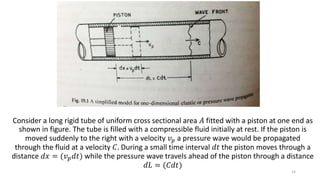
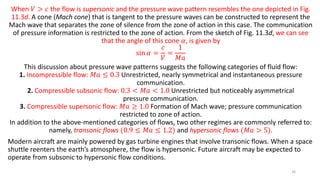
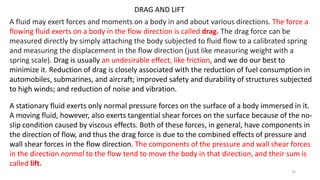
![Before the sudden motion of the piston the fluid within the length 𝑑𝐿 has an initial
density 𝜌 and its total mass is (𝜌 𝑑𝐿 𝐴) .after the piston is moved through a distance 𝑑𝑥
the fluid density within the compressed region of length (𝑑𝐿 − 𝑑𝑥) will be increased and
becomes (𝜌 + 𝑑𝜌). Thus the total mass of fluid in the compressed region will be [(𝜌 +
𝑑𝜌) 𝑑𝐿 − 𝑑𝑥 𝐴] therefore according to the principle of continuity 𝜌 (𝑑𝐿) 𝐴 = (𝜌 + 𝑑𝜌)
𝑑𝐿 − 𝑑𝑥 𝐴
Or, 𝜌 (𝑑𝐿) =(𝜌 + 𝑑𝜌) 𝑑𝐿 − 𝑑𝑥
But 𝑑𝐿 = Cdt and 𝑑𝑥 = 𝑣 𝑝 𝑑𝑡 the above equation becomes,
𝜌 (𝐶𝑑𝑡) =(𝜌 + 𝑑𝜌) 𝐶 − 𝑣 𝑝 𝑑𝑡
Or, 0 = Cd𝜌 − 𝜌𝑣 𝑝 − 𝑑𝜌𝑣 𝑝
Since the velocity 𝑣 𝑝 of the piston is much smaller than the elastic wave velocity 𝐶 the
term 𝑑𝜌𝑣 𝑝 maybe neglected and hence 𝐶 𝑑𝜌 = 𝜌𝑣 𝑝 or 𝐶 =
𝜌𝑣 𝑝
𝑑𝜌
………………….(1)
15](https://image.slidesharecdn.com/fluidmechanics-170404114603/85/Fluid-mechanics-15-320.jpg)




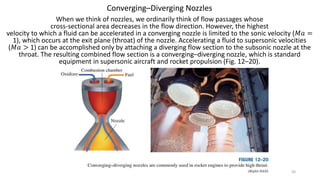





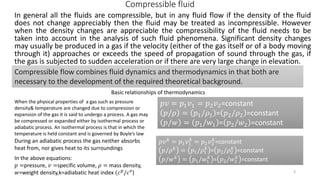
The document provides an overview of topics related to compressible fluid flow, including: - Continuity, impulse-momentum, and energy equations for compressible fluids under isothermal and adiabatic conditions. - Basic thermodynamic relationships like the ideal gas law, processes like isothermal and adiabatic, and concepts like internal energy and entropy. - Propagation of elastic waves in fluids due to compression, and how the velocity of sound depends on factors like pressure, temperature, and fluid properties. - Additional topics covered include stagnation properties, flow through converging-diverging passages, shock waves, and external aerodynamic flows.