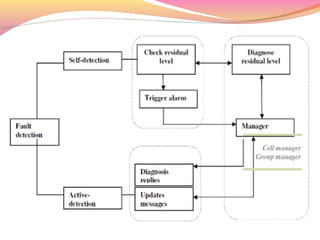
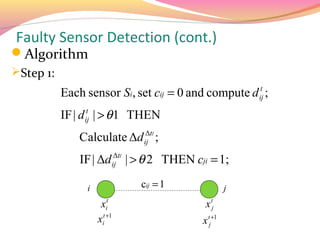
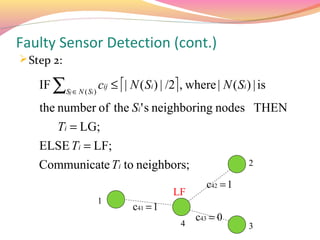
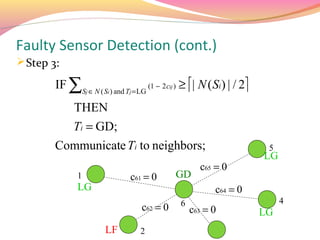
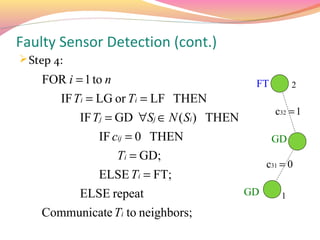
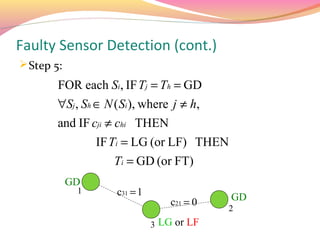
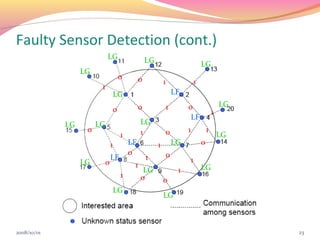
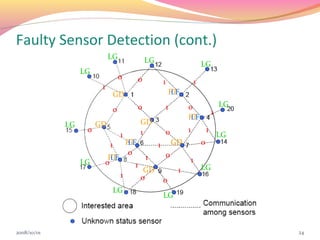
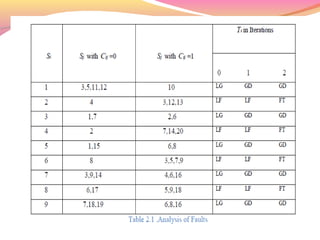
This document presents a fault management mechanism for wireless sensor networks. It discusses fault detection and diagnosis through self-detection by sensor nodes and active detection by cell managers. It also discusses fault recovery through waking sleeping nodes, moving mobile nodes, or selecting a secondary cell manager. The document then describes the network and fault models, and presents an algorithm for faulty sensor detection based on sensor measurements and designating sensor statuses as good, low quality, faulty, or good detected.