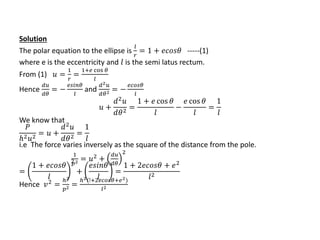
This document contains 5 problems related to motion under central forces. Problem 1 involves a particle inside a rotating tube and derives an expression for the distance of the particle over time. Problem 2 finds the law of force for a curve defined by r^n = a^n cos(nθ). Problem 3 finds the law of force for circular motion. Problem 4 finds the law of force, velocity, and period for elliptical motion under a central force directed toward the focus. Problem 5 shows that motion under a central force where velocity equals circular motion at the same distance results in an inverse cube law of force and an equiangular spiral path.